博文
可支持感觉运动回路的电子皮肤
|
人工智能(AI)和机器人技术的研发继续探索生物体与机器的界面。基于人工智能的电动假肢手臂和腿,以及将假肢与人脑活动联系起来的脑机接口,旨在最终成功地完全模仿人类的身体功能,并为患有疾病和伤害的人提供医疗解决方案。然而,为了更无缝地将机械致动器(如假肢)与人体集成,开发一种覆盖身体和机械部件的大型、精细和可拉伸的传感器是必要的(1-6)。电子皮肤(e-skin)将消除活体和机器部件之间的界限。斯坦福大学Wang等人(7)最近在《科学》上报告了模仿生物皮肤感觉反馈的神经形态电子皮肤系统的发展。开发了一种单片集成、柔软和低压驱动的电子皮肤系统,没有任何刚性电子元件,可以模拟生物皮肤的感官反馈功能,包括多模态接收、神经样脉冲序列信号调理和闭环致动(图 1、C 和 D 以及表 S1)。具体而言,需要三层、高介电常数 (κ)、可拉伸电介质设计,将可拉伸电路的驱动电压降低到几伏,以实现安全和节能的车身操作。
Weichen Wang et al. ,Neuromorphic sensorimotor loop embodied by monolithically integrated, low-voltage, soft e-skin.Science380,735-742(2023)
支持感觉运动回路的电子皮肤
人工感觉受体有可能对外部刺激做出反应,例如温度和压力。在这种神经形态系统中,低压驱动电路将输入模拟信号编码为脉冲序列,这些脉冲序列可以沿着神经移动到大脑。然后,反应从大脑传播并通过人工突触,人工突触调节电流并引起身体运动。
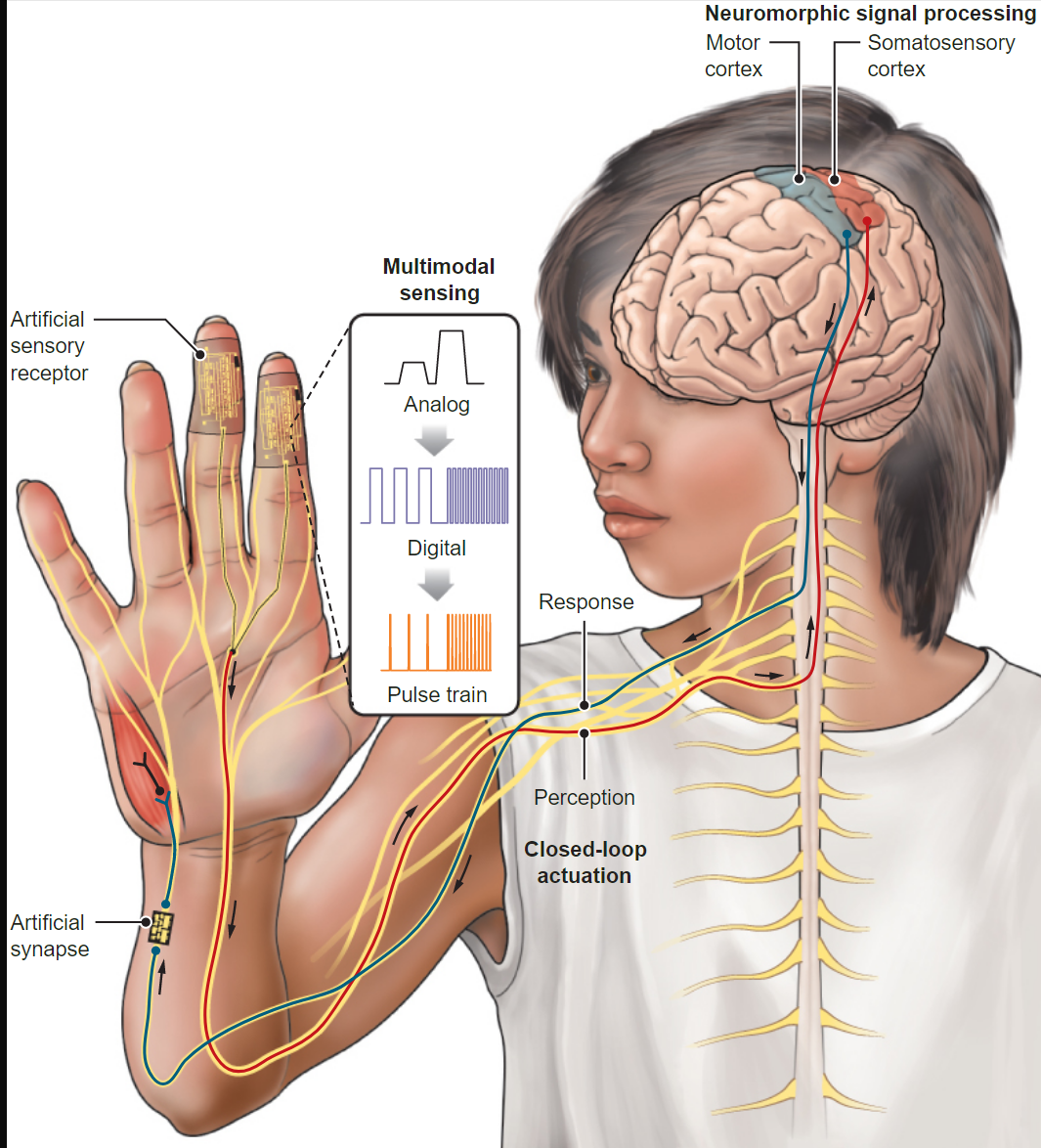
机制上讲,人体是一个覆盖皮肤的传感器和一个执行器,可将输入能量转换为预期的物理运动。皮肤表面的感觉器官以高度的敏感性感知外部刺激,例如压力、疼痛和温度。身体可以感觉到危险刺激,并立即通过移动身体试图避免伤害(反射反应)。
开发完全模仿活体皮肤功能的电子皮肤系统的主要挑战是建立感觉反馈机制。感觉反馈是皮肤感知到的感觉信息通过神经传递到大脑的过程。大脑必须首先处理传递的感觉信号,然后操作肌肉。这种感觉运动神经系统(感知和运动的闭环)对于实现自然身体功能至关重要。
传感器阵列对于模仿生物体的皮肤功能至关重要;它们由多个探测器组成,这些探测器在多维阵列中排列和对齐。通过建立多通道传感器阵列,可以模拟人体皮肤的复杂感官功能。然而,生成多行脉冲序列信号模式(8)并通过神经将它们传递到大脑是一个挑战。生物体通过使用调频信号对输入幅度信息进行编码并沿神经传播感觉信息来完成这种感觉信息的传输。换句话说,它同时是一个信号数字化电路,将来自感觉受体的模拟信号转换为尖峰序列信号模式,以及调制电流幅度并引起身体运动的人工突触(9)。为了实现适合完成日常任务的功能性人机界面,必须开发一种具有类似皮肤特性的电子系统,模仿生物功能,例如多模态传感、神经形态信号处理和闭环致动(10),这比简单地制造传感器阵列更困难。
Wang等人开发了一种神经形态电子皮肤系统,可以满足与生物体整合的所有基本要求。作者创造了可拉伸的场效应晶体管和全固态突触晶体管,可以在低电压(0.5 V)下驱动,以及它们的集成技术(见图)。
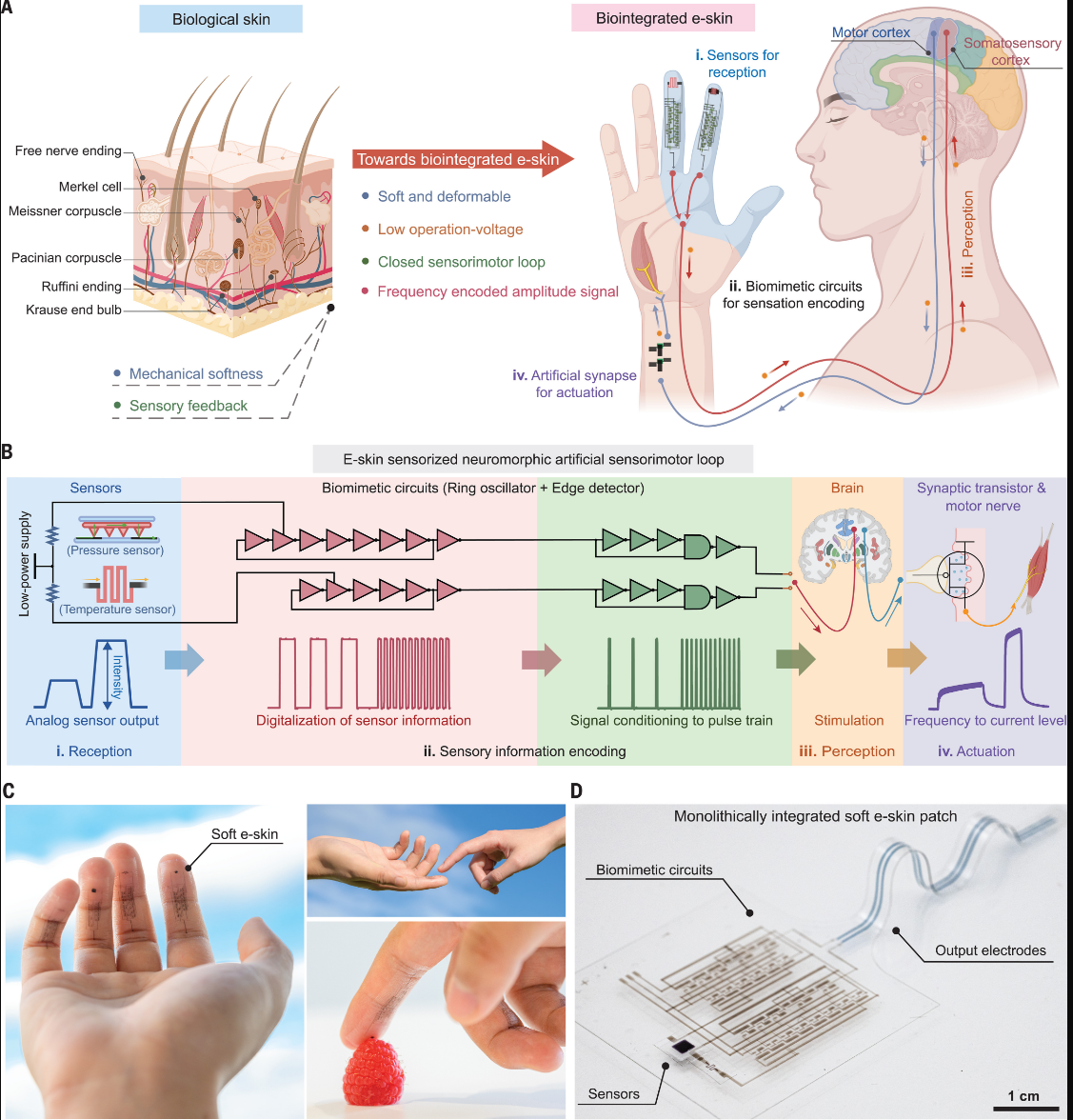
可拉伸有机晶体管由三层高介电常数弹性体电介质作为核心技术,提供与多晶硅晶体管相当的电气性能,如低压驱动、低功耗和适度的电路集成度。通过由这种可拉伸的高性能有机器件组成,Wang等人的电子皮肤能够进行多模态感知,产生神经形态学脉冲序列信号和闭环驱动,从而模仿生物感觉运动环路。
由于电子皮肤系统的所有基本组件都可以重现生物感知-驱动环,Wang等人在活大鼠模型中测试了该平台的效用。作者将柔软的电子皮肤与大鼠的躯体感觉皮层联系起来,以再现皮肤感觉。预计这将在运动皮层中引起反馈反应。诱发的运动信号会刺激坐骨神经,然后通过人工突触,信号会激活下游肌肉,完成人工感觉运动环路。在实验中,施加到传感器的各种压力触发了体感皮层的数字化输入,从而成功地刺激了运动皮层中神经元的放电。
神经形态电子皮肤系统的发展预计将对广泛的工业领域产生重大影响。例如,穿着电子皮肤的机器人可能能够以与人类相同的方式感受到疼痛和压力,从而更好地确保他们所陪伴的人的安全。目前,皮肤损伤和截肢导致感知和运动的闭环受到巨大破坏,抓取物体等简单任务对患者来说变得具有挑战性。如果可以使用神经形态电子皮肤系统重建感知和运动的闭环,这些患者的生活质量将得到改善。
数字技术的进步正在将信息空间与物理空间结合起来。未来对电子皮肤的研究应以更快的感觉反应、更精细的感觉器官以及更高密度和多模态的感知传感器元件为目标。
https://blog.sciencenet.cn/blog-41174-1388855.html
上一篇:细胞死亡和癌症治疗新策略!
下一篇:氯胺酮临床试验失败了,说明什么?
