博文
知识−数据−模型驱动的低空动目标轨迹融合预测方法
|
引用本文
周同乐, 刘子仪, 陈谋. 知识−数据−模型驱动的低空动目标轨迹融合预测方法. 自动化学报, 2026, 52(2): 296−308 doi: 10.16383/j.aas.c250429
Zhou Tong-Le, Liu Zi-Yi, Chen Mou. Knowledge-data-model-driven trajectory fusion prediction method for low-altitude moving target. Acta Automatica Sinica, 2026, 52(2): 296−308 doi: 10.16383/j.aas.c250429
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250429
关键词
低空环境,知识−数据−模型驱动,动目标,数据融合,轨迹预测
摘要
针对低空环境下动目标轨迹预测问题, 提出一种知识−数据−模型驱动的动目标轨迹融合预测框架. 基于低空飞行器运动特征构建飞行知识混合专家模型, 通过将多源传感器数据输入至各飞行知识专家模块, 实现目标机动模态的精细化识别, 并使用Mamba模型提取时空关联特征; 设计权值自适应调节机制, 利用注意力机制动态融合多源感知数据, 解决传感器时空异步问题; 采用门控循环单元建模长期时序依赖关系, 根据目标历史飞行数据生成初步预测轨迹; 基于低空目标运动学方程构建物理信息神经网络, 通过动态权衡数据驱动损失与物理约束损失, 矫正数据驱动偏差, 确保预测轨迹满足运动学约束并有效抑制多步预测误差累积. 数值仿真及实验验证结果表明, 所提出的知识−数据−模型驱动的动目标轨迹融合预测方法, 能够有效预测低空目标飞行轨迹.
文章导读
低空环境是指在垂直高度1000 m以下、根据实际需要延伸至不超过3000 m的低空空域范围, 是新兴经济与科技融合的关键领域. 随着地理信息、人工智能、无人机技术的发展, 我国低空环境正处于“政策驱动规模化、技术突破商业化”的关键转型期. 低空环境下移动目标具有“异构性突出、分布密度大、飞行频次高”等特点, 且随着民用无人机尤其是消费级无人机的广泛普及, 由于针对低空目标的监测与防范体系尚不完善, 违规飞行情况愈发频繁, 给低空飞行任务的安全性带来严重威胁[1]. 对非法入侵、恶意无人机或低空突防目标的及时探测、跟踪和轨迹预测是有效拦截和处置的前提. 因此, 如何实现基于多源传感器探测系统对低空移动目标轨迹进行实时监测与精准跟踪, 并及时对潜在的危险倾向发出预警, 实现对低空目标的有效监管, 对于维护低空经济秩序至关重要.
精准的轨迹预测是实现安全、高效、有序的低空空域管理的基础, 有助于提升低空环境冲突探测与消解、流量管理、防碰撞告警等能力, 已成为低空经济领域的研究热点. 常见的移动目标轨迹预测方法主要分为两类: 基于物理模型的方法和基于数据驱动的方法. 基于物理模型的方法依托物理方程构建预测机制, 需要融入目标动力学模型与环境模型, 在模型匹配条件下及结构化环境中通常能实现较高的预测精度, 但必须精确获知目标的物理特性参数, 对未建模动态适应性不足, 且存在显著的计算复杂度[2]. 文献[3]提出一种基于混合系统理论的飞机状态切换模型, 该模型可在多个飞行阶段之间进行转换, 通过综合考虑飞机状态的连续变化特性以及混合递归仿真的特性, 推断飞行轨迹. 文献[4]基于高超声速目标姿态近似线性的气动参数, 构建高超声速目标机动模式集, 采用自适应交互多模型轨迹预测算法实现了高超声速目标轨迹预测. 数据驱动方法通过历史轨迹数据的统计学习实现目标轨迹预测, 无需显式物理建模. 主要包括统计模型和机器学习模型两种基本类型[5]. 统计模型通过拟合历史数据来获取轨迹预测结果. 为消除飞机物理模型的影响, 文献[6]基于大量实际飞行数据建立飞行器4D轨迹预测模型, 并通过聚类−回归分析标定系数, 实现了飞行器4D轨迹有效管理. 机器学习模型, 如神经网络, 可通过从历史数据中学习挖掘非线性时空关联来提取复杂交互特征, 实现目标轨迹预测. 文献[7]针对城市低空飞行目标轨迹预测问题, 提出一种基于贝叶斯意图推理和深度学习局部规划的分层轨迹预测框架. 文献[8]构建基于目标飞行状态识别的无人机轨迹预测模型, 有效提升无人机轨迹预测精度. 针对飞机的机动特性及其运动范围具有高度不确定性, 文献[9]提出一种基于轨迹聚类和时空特征提取的深度学习轨迹预测算法, 有效提升轨迹预测的准确性. 针对长短期记忆(long short-term memory, LSTM)网络迭代输出引起的误差累积问题, 文献[10]提出一种基于Transformer的目标飞行器长期轨迹预测模型, 利用自注意力机制从历史飞行数据中捕获时序依赖关系, 采用单步序列生成策略取代自回归解码以消除累积误差并提升预测速度. 事实上, 低空目标轨迹预测本质上是一类时间序列预测问题. 文献[11]通过多组数据的横向对比, 验证Mamba模型在此类任务中的有效性, 结果表明Mamba能够以较低的计算开销实现较高的预测精度. 文献[12]提出一种结合时空学习聚合器的无人机轨迹预测方法, 通过维度分离与空间−时间依赖建模, 在少量数据下实现无人机轨迹高精度预测. 文献[13]提出一种基于目标导向扩散模型的飞行轨迹预测方法, 其通过目标估计获取飞行意图, 并据此驱动扩散过程以生成多样化的预测轨迹, 实现意图引导下的飞行轨迹概率化预测. 文献[14]提出一种基于遗传算法优化的时序卷积网络模型, 用于航空器四维航迹预测, 能够实现对未来时段内航空器三维空间位置及其对应时间信息的精确估计. 文献[15]构建基于全局和局部属性关系图卷积网络的飞行轨迹预测模型, 通过融合轨迹点的全局与局部属性特征构建属性图, 利用图卷积提取综合特征后输入LSTM网络进行预测, 有效提升预测性能. 数据驱动方法展现出的强大非线性拟合能力使其在目标轨迹预测任务中得到广泛应用, 但其本质上仍为黑箱建模, 预测结果可能违背基本的运动学约束, 在长序列预测与数据稀疏场景下易出现误差积累问题; 此外, 数据驱动方法高度依赖高质量的训练数据, 对未包含在训练域中的飞行模式或突发机动的泛化能力有所不足, 在一定程度上限制了其在轨迹预测任务中的可靠性、泛化能力与可解释性. 尽管上述基于模型驱动和基于数据驱动的轨迹预测方法针对特定问题都有一定的有效性, 但无法兼顾物理一致性与场景泛化性, 模型和数据混合驱动的动目标轨迹预测方法受到越来越多关注. 文献[16]根据目标飞行器运动学模型, 引入八种典型机动轨迹方程, 通过改变轨迹方程的关键参数创建数据集, 支持LSTM网络离线训练, 在有噪声干扰情况下实现目标飞行器轨迹的有效预测. 此外, 低空环境下目标受复杂环境扰动和任务需求驱动频繁切换运动模态, 这些运动模态往往隐含着目标的运动趋势信息, 能够在一定程度上引导其轨迹形成, 通过实时识别目标运动模态并将其作为结构化先验知识注入预测模型, 可有效提升轨迹预测精度. 同时, 低空环境中地形高程、障碍物分布等静态环境结构与气象扰动、电磁干扰等动态环境状态构成关键空间约束, 将这些知识特征通过规则化表达整合至预测过程, 能够矫正传感器数据偏差, 缓解传统迭代预测的误差累积效应, 抑制低数据场景下的物理不可行预测.
鉴于此, 针对低空环境下动目标轨迹预测需求, 本文构建知识−数据−模型驱动的动目标轨迹融合预测框架. 该框架通过四个核心模块实现多层次数据融合与轨迹预测, 主要创新点如下:
● 基于知识驱动的时空特征提取模块利用飞行知识混合专家模型(mixture-of-experts, MoE)识别目标机动模态以提升特征针对性, 并结合Mamba模型在较低计算成本下将多源传感器数据转化为蕴含时空上下文信息的特征向量;
● 基于注意力机制的多传感器数据融合模块采用自适应加权策略, 有效解决多源感知数据的时空异步问题, 生成一个更全面、更可靠的环境感知表示, 从而克服了不同传感器在可靠性、观测视角、精度等方面的差异性;
● 基于数据驱动的目标轨迹学习预测模块通过门控循环单元(gated recurrent unit, GRU)网络建模长期时序依赖, 从历史行为数据中学习低空动目标复杂的运动模式, 生成符合场景语义的初步预测;
● 基于模型驱动的目标轨迹特征重构模块构建物理信息神经网络(physics-informed neural network, PINN)以整合低空目标运动学方程, 通过数据−物理协同优化确保轨迹的物理可行性与预测精度.
该框架通过知识引导的稳定性保障、数据驱动的场景泛化与模型约束的物理可解释性三重协同, 为复杂低空环境下的动目标轨迹预测提供了安全可靠的解决方案.
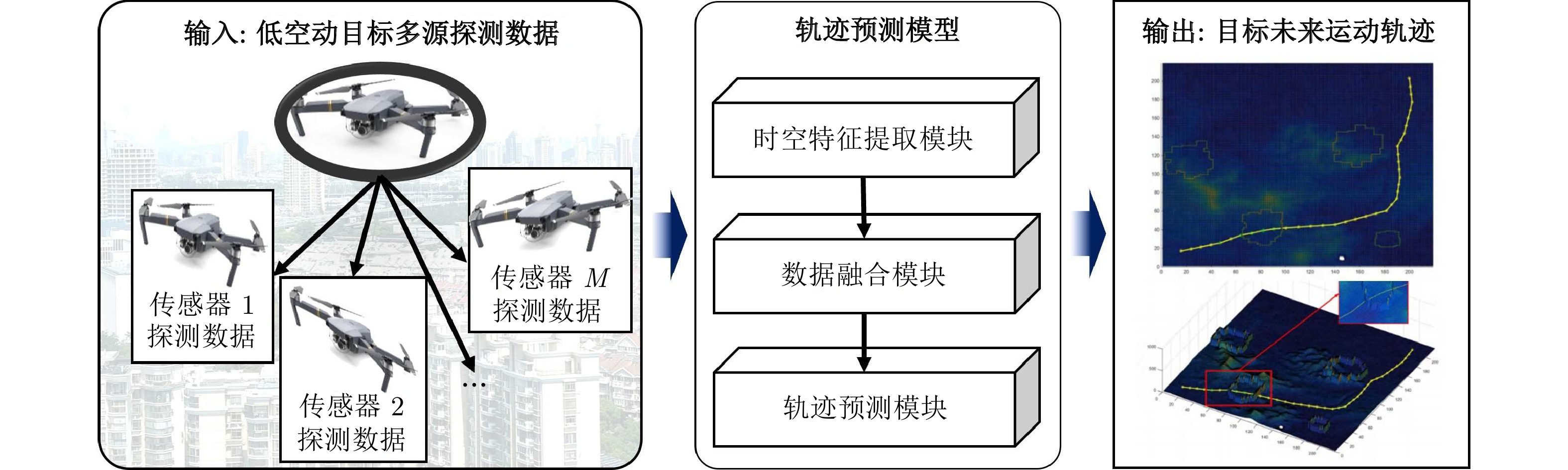
图1 低空环境下动目标轨迹融合预测流程
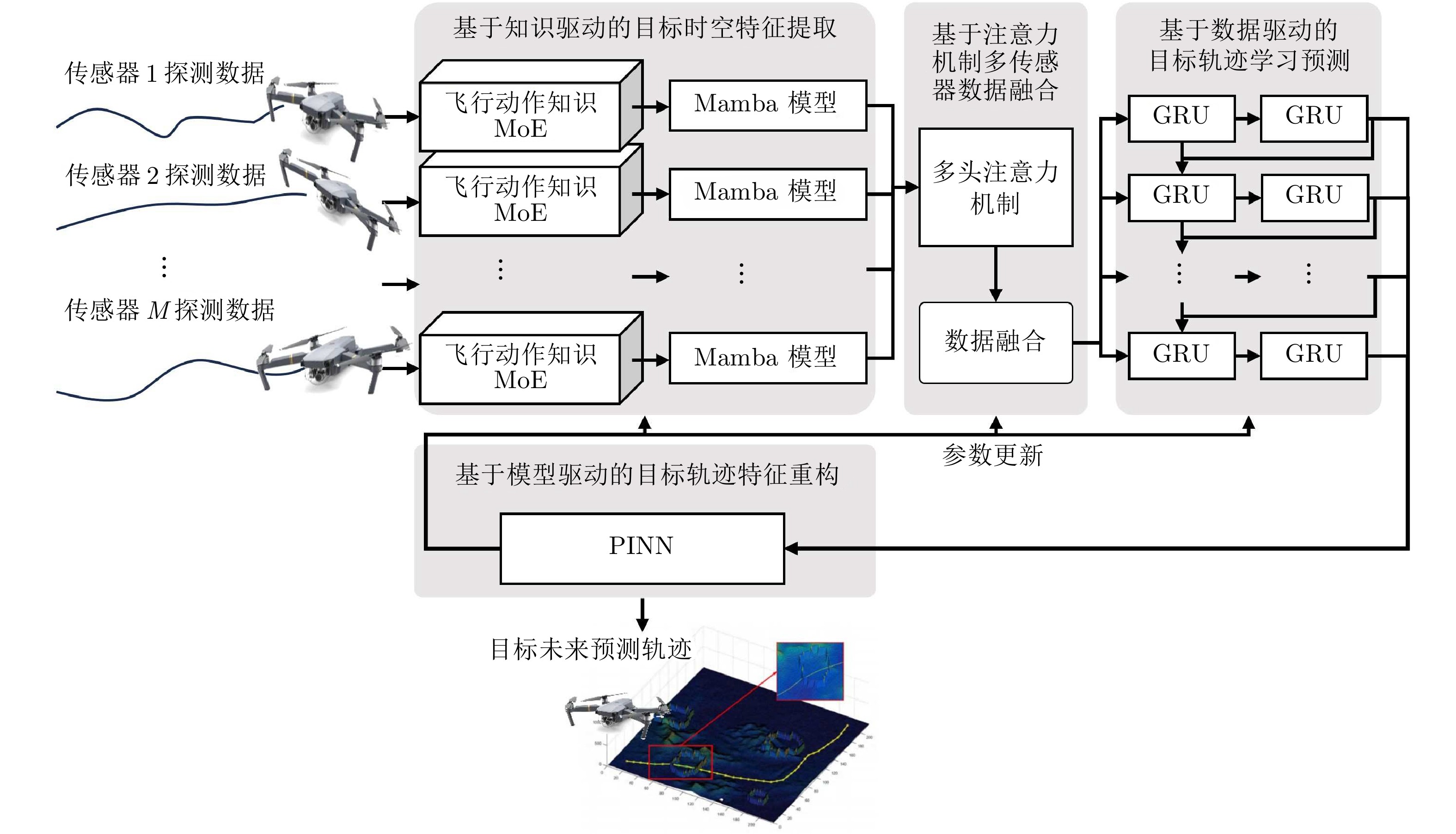
图2 知识−数据−模型驱动的动目标轨迹融合预测框架
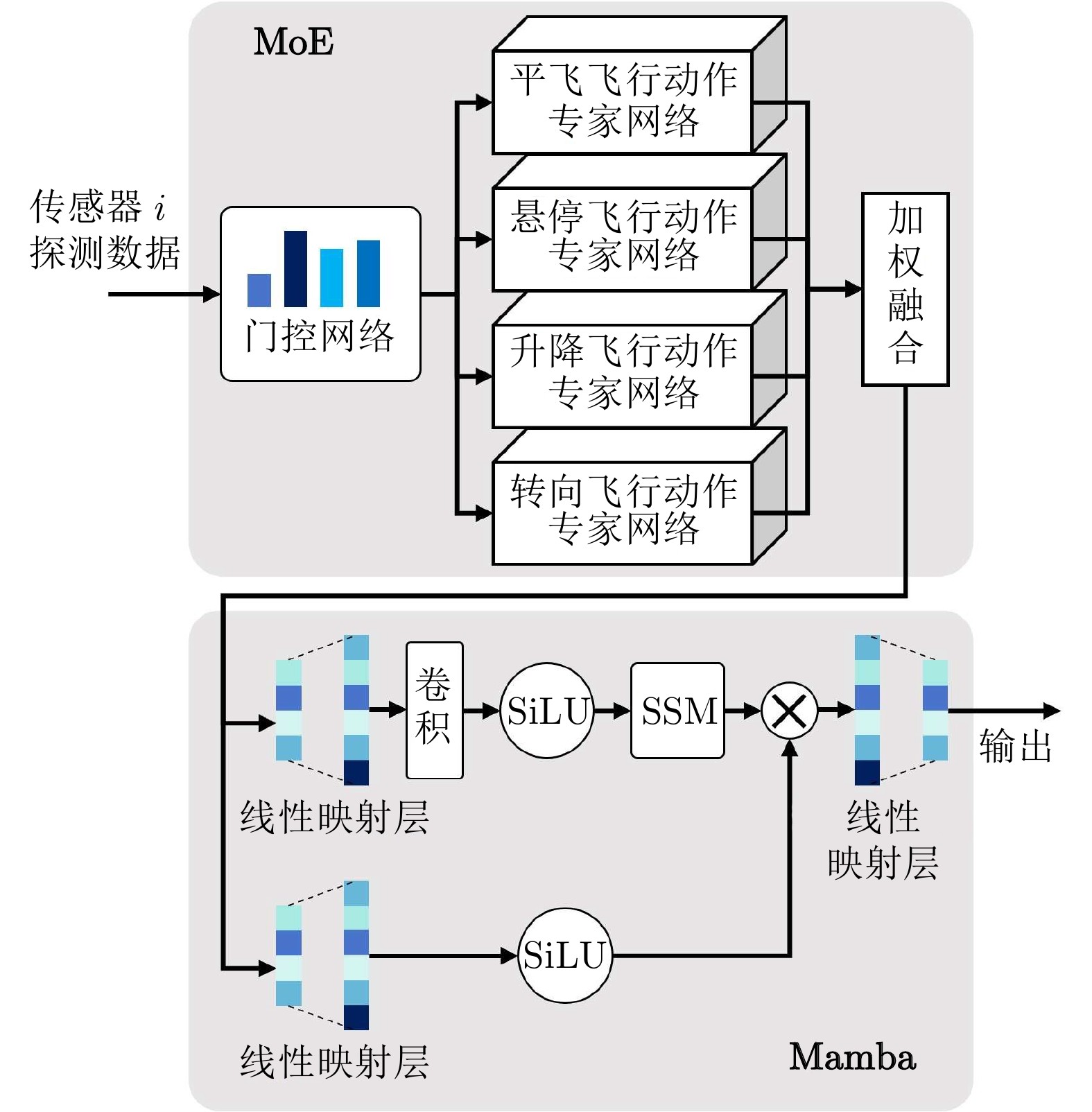
图3 基于MoE-Mamba的目标时空特征提取结构图
本文提出一种知识−数据−模型驱动的低空动目标轨迹融合预测方法, 实现对低空目标的有效跟踪. 基于MoE封装低空目标飞行动作知识, 采用Mamba实现目标飞行时空特征提取; 通过多头注意力机制动态分配传感器权值以解决不同性能传感器下特征融合问题; 使用GRU网络学习目标轨迹数据中的时空依赖关系, 生成未来时间窗内的低空目标预测结果; 引入PINN嵌入低空目标运动学方程, 通过设计数据驱动损失、目标速度残差损失、目标位置残差损失和目标状态连续性损失来约束预测轨迹的微分关系, 提升轨迹预测结果的物理合理性. 通过大范围有遮挡区域场景和障碍物密集区域场景实验验证了本文所提方法的有效性. 未来可面向验证模型的泛化能力、提升强时变数据的预测性能以及感知−预测−决策一体化系统集成等方向深入拓展, 以推动低空智能感知技术的实际应用.
作者简介
周同乐
南京航空航天大学自动化学院讲师. 主要研究方向为智能指挥与控制及其在无人系统中的应用. E-mail: zhoutongle@nuaa.edu.cn
刘子仪
南京航空航天大学自动化学院硕士研究生. 主要研究方向为数据融合, 目标轨迹预测. E-mail: l1762629272@126.com
陈谋
南京航空航天大学自动化学院教授. 主要研究方向为非线性系统控制, 飞行控制和火力控制. 本文通信作者. E-mail: chenmou@nuaa.edu.cn
https://blog.sciencenet.cn/blog-3291369-1526444.html
上一篇:基于社会化协同的无人机集群目标合围控制
下一篇:基于传感重构的高可靠无人飞行器自动防撞策略