博文
基于混合驱动与梯度优化的模糊宽度模型预测控制
|
引用本文
田昊, 汤健, 余文, 乔俊飞. 基于混合驱动与梯度优化的模糊宽度模型预测控制. 自动化学报, 2026, 52(3): 481−509 doi: 10.16383/j.aas.c250195
Tian Hao, Tang Jian, Yu Wen, Qiao Jun-Fei. Fuzzy broad model predictive control based on hybrid-driven and gradient optimization. Acta Automatica Sinica, 2026, 52(3): 481−509 doi: 10.16383/j.aas.c250195
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250195
关键词
模型预测控制,区间二型模糊宽度学习系统,梯度粒子群优化,知识−数据驱动,代理模型,城市固废焚烧
摘要
模型预测控制(MPC)是广泛应用于各类工业过程的先进过程控制策略. 深度神经网络能够提升传统MPC性能, 但存在计算复杂度高和过拟合风险. 在MPC中采用常规粒子群优化(PSO)虽具备全局搜索能力, 却因计算消耗和初始解依赖等问题难以满足实时控制需求. 针对上述问题, 提出基于混合驱动和梯度优化的模糊宽度MPC. 首先, 采用区间二型模糊宽度学习系统构建预测模型, 增强非线性建模和不确定性处理能力. 其次, 在滚动优化过程中, 引入梯度下降与PSO的协同策略, 以确保快速收敛并提升全局搜索性能, 同时利用系统样本数据库和粒子档案数据库构建知识−数据驱动的代理模型以降低计算消耗. 最后, 设计操纵变量基线求解策略以提高控制输出的安全性和可靠性. 通过典型非线性系统和实际城市固废焚烧过程控制的仿真实验, 验证了所提方法的有效性.
文章导读
模型预测控制(model predictive control, MPC)作为一种先进过程控制(advanced process control, APC)策略, 通过持续预测系统未来的动态行为和滚动优化控制输入确定最优控制序列, 进而解决优化问题, 实现对复杂动态系统的有效控制[1]. 凭借在处理多变量系统、复杂约束和非线性动态行为等方面的优势, MPC在高炉炼铁[2]、污水处理(wastewater treatment process, WWTP)[3−4]与城市固废焚烧(municipal solid waste incineration, MSWI) 等[5−6]工业过程领域受到广泛关注. 然而, 在复杂非线性系统中, 被控对象的动态特性使其精确的机理模型难以获得, 导致基于动态矩阵控制和二次动态矩阵控制的传统MPC难以适用[7]. 具体而言, 采用带观测器的线性状态空间形式或非线性二次矩阵控制形式描述的MPC, 难以准确预测未来行为和优化控制信号. 在人工智能发展和工业大数据的背景下, 利用先进的智能建模技术的数据驱动MPC已成为非线性系统控制研究和应用的焦点[8]. 然而MPC在复杂非线性系统中的应用仍在预测模型构建、滚动优化、代理模型与知识融合四个方面存在挑战.
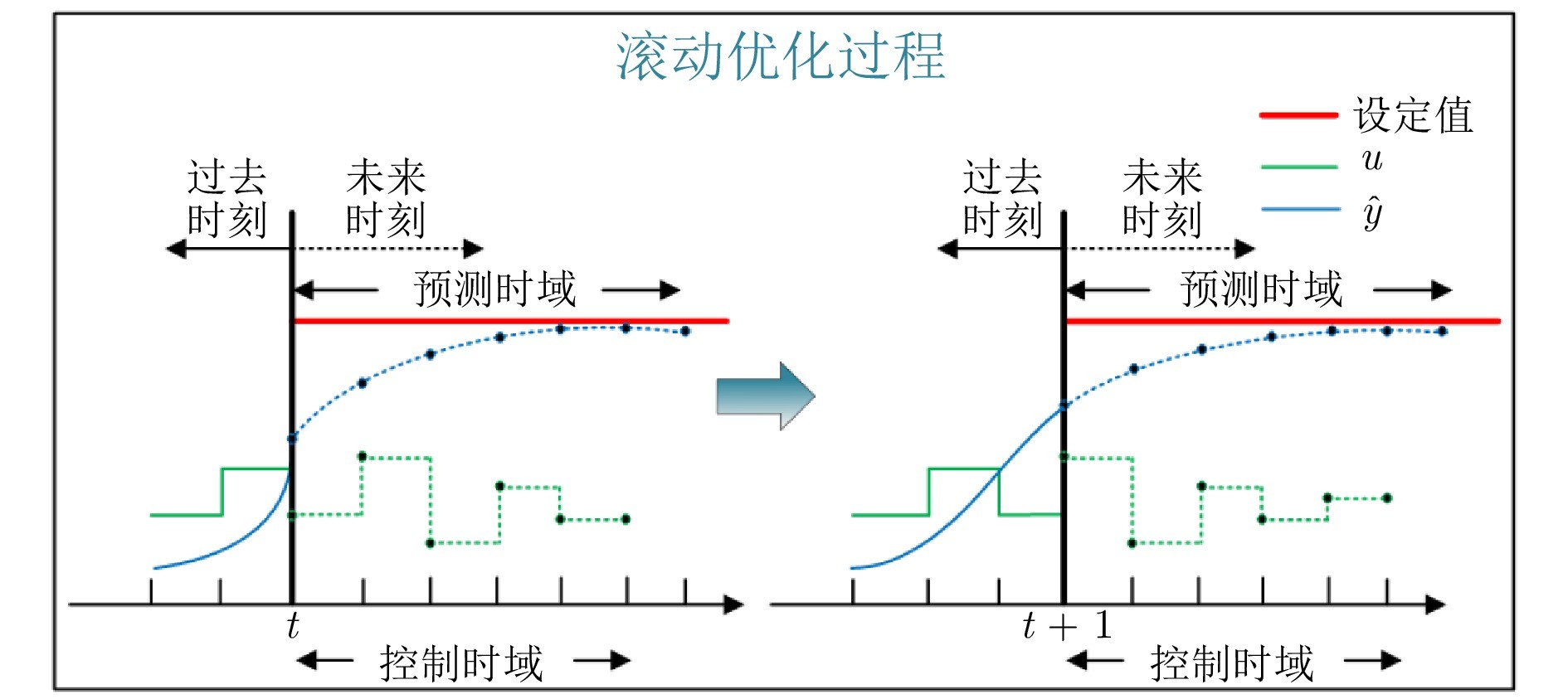
图1 MPC的滚动优化过程
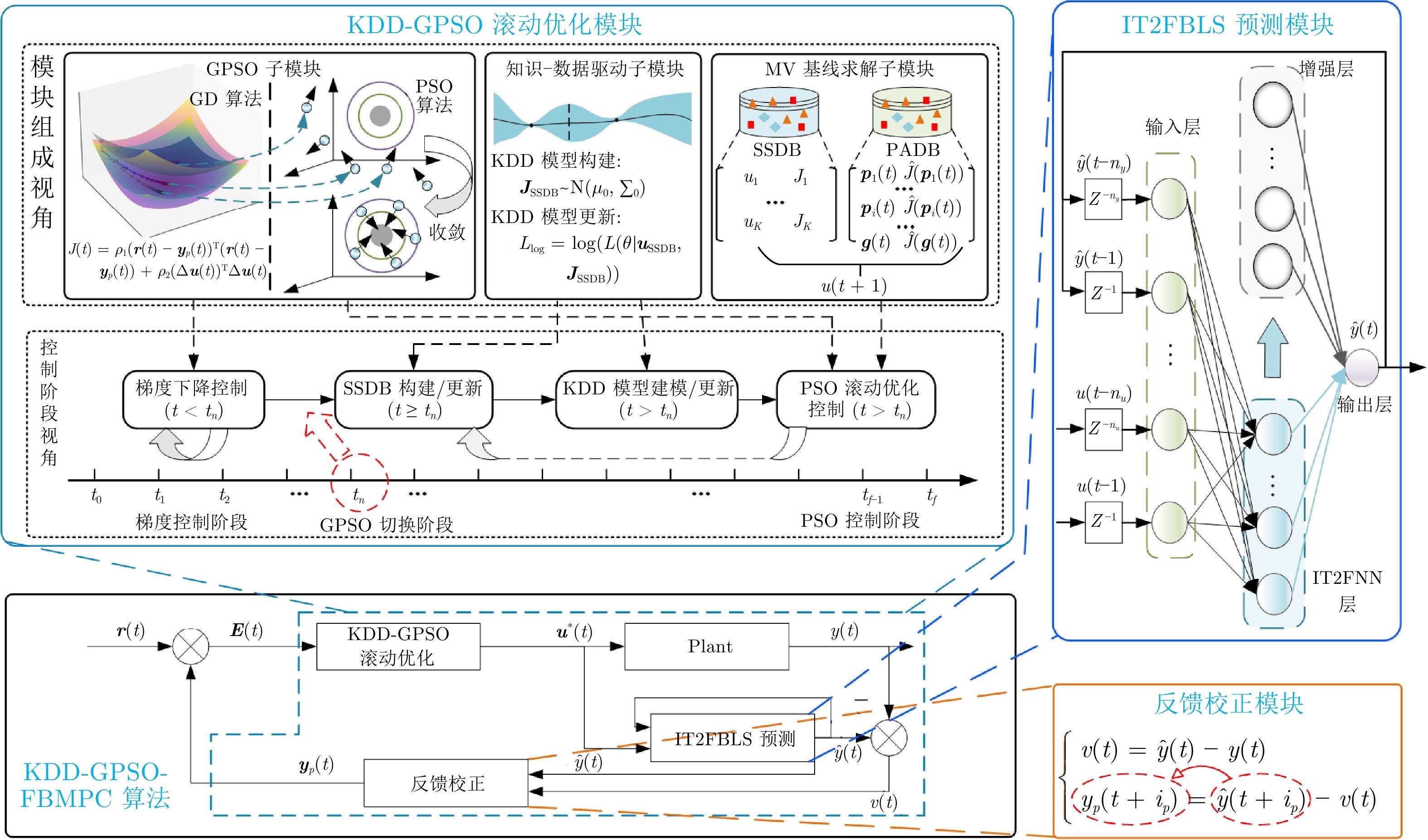
图2 KDD-GPSO-FBMPC控制策略图
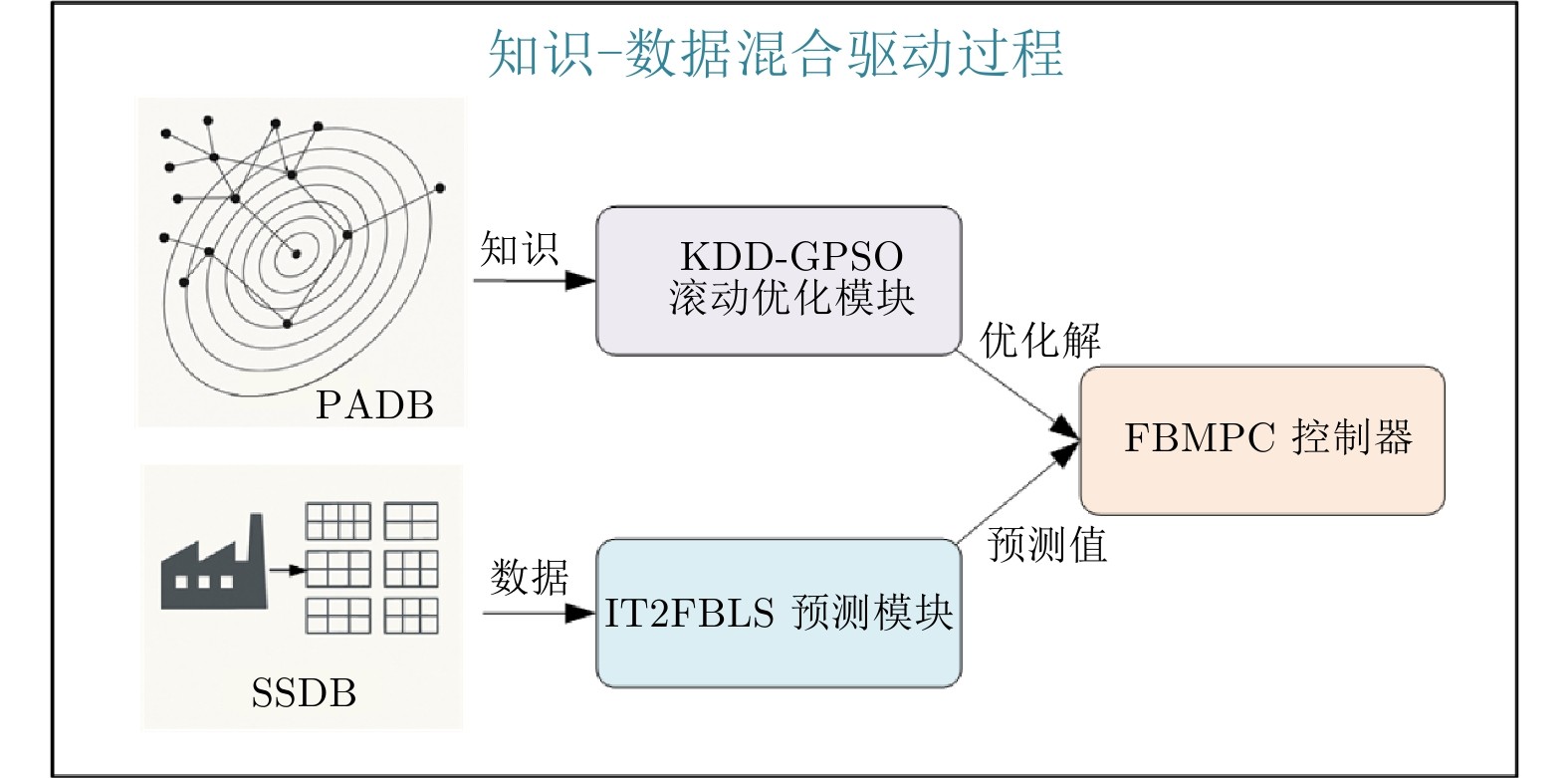
图3 知识−数据驱动过程
针对复杂非线性系统的MPC在计算消耗、控制精度和优化性能方面的挑战, 本文提出一种KDD-GPSO-FBMPC策略. 通过将IT2FBLS引入MPC的预测模型, 增强了系统的非线性建模能力和对不确定性的鲁棒性; 采用GPSO的协同滚动优化策略, 在提高初始解质量的同时确保全局最优搜索性能. 此外, 设计SSDB和PADB, 实现基于KDD的代理模型更新, 有效降低了PSO的计算负担, 并通过MV基线求解策略保障控制过程的安全性和稳定性. 实验结果表明了KDD-GPSO-FBMPC在提高控制精度、增强系统鲁棒性以及抑制噪声干扰方面的有效性.
所提算法的主要贡献如下: 1)利用IT2FBLS的高精度预测和GPSO的全局搜索能力, 显著提升了控制器在应对外部噪声和系统参数变化时的性能; 2)所提算法将GD、PSO、KDD模型和MV基线求解策略相结合, 为复杂工业控制系统提供了有效的优化与控制能力; 3)引入KDD模型减少了PSO优化中的计算量, 同时维持了高水平的控制精度, 为高精度控制场景提供了有效的解决方案; 4)通过MV基线求解策略, 设置保守的基线解, 以避免KDD模型失配造成的影响, 减少系统偏差.
综上, 本文提出的KDD-GPSO-FBMPC在处理复杂非线性系统的MPC问题中展现出独特优势. 一方面, IT2FBLS预测模型增强了非线性建模与不确定性处理能力; 另一方面, GD与PSO的协同优化在保证全局搜索能力的同时显著提升了收敛速度. 此外, KDD代理模型与MV基线求解策略有效降低了计算消耗, 并提升了解的安全性与鲁棒性. 这些特点使得所提方法不仅在MSWI过程控制中表现优越, 而且对复杂工业过程的高精度与实时优化控制提供了潜在应用价值.
所提算法的局限性如下: 1)尽管引入了KDD模型作为PSO的代理模型, 有效降低了计算消耗, 但完整算法的计算时间相较于传统控制算法仍较长, 限制了其在对实时性具有高需求的场景中的应用; 2) KDD模型的预测性能依赖于数据的采样与模型的更新策略, 在复杂或动态性较强的场景中, 如果系统状态发生大幅变化而未及时更新KDD模型, 则可能导致预测误差增大, 降低控制效果; 3)该算法涉及GD、PSO和KDD等多个模块的参数调优, 实验过程需要反复尝试优化超参数, 增加了实际应用中的部署成本; 4)通信延迟是工程部署中的核心约束, 本文尚未对通信延迟展开仿真与实测.
针对此, 未来研究计划包括: 1)在计算效率方面, 将探索基于GPU的并行化与分布式计算框架, 并引入异步粒子更新和多保真代理筛选机制, 以降低无效模型调用的比例. 同时, 需要解决通信开销和同步等待带来的瓶颈, 并确保在异步模式下全局收敛性不受破坏. 2)在代理自适应方面, 将研究基于滑动窗口的动态更新与在线不确定性量化方法, 结合自组织结构调整来提升泛化能力. 其挑战在于如何在有限计算资源下保持更新的及时性, 同时避免数据稀缺条件下的过拟合和灾难性遗忘问题. 3)在参数设置方面, 将尝试结合贝叶斯优化、强化学习和元启发式搜索, 实现超参数的自动调优, 以在控制精度与计算开销之间实现自适应权衡, 但关键难点在于如何在有限的时间窗口内收敛到稳定参数, 并避免引入新的不确定性. 4)在网络化与鲁棒性方面, 将致力于发展事件触发式MPC以减轻通信压力, 并与Tube-MPC约束收紧方法相结合, 以保证系统在有界延迟与抖动条件下的鲁棒稳定性. 其难点在于如何精确建模通信不确定性, 并在最坏情况下仍确保闭环安全与性能.
作者简介
田昊
北京工业大学信息科学技术学院硕士研究生. 2022年获得山东工商大学学士学位. 主要研究方向为城市固废焚烧炉温智能控制
汤健
北京工业大学信息科学技术学院教授. 2012年获得东北大学博士学位. 主要研究方向为小样本数据机器学习, 复杂工业过程智能建模与控制和城市固废焚烧数字孪生. 本文通信作者
余文
墨西哥国立理工学院自动控制系教授. 1995年获得东北大学博士学位. 主要研究方向为智能建模与控制
乔俊飞
北京工业大学信息科学技术学院教授. 1998年获得东北大学博士学位. 主要研究方向为神经网络, 智能系统和复杂工业过程建模与最优控制
https://blog.sciencenet.cn/blog-3291369-1532582.html
上一篇:基于双高斯分布混合的可解释自适应鲁棒神经网络建模方法
下一篇:基于局部分形维数最大化的单幅图像细节增强
