博文
基于传感重构的高可靠无人飞行器自动防撞策略
|
引用本文
李睿, 许斌, 阎振鑫, 杨林. 基于传感重构的高可靠无人飞行器自动防撞策略. 自动化学报, 2026, 52(2): 309−321 doi: 10.16383/j.aas.c250535
Li Rui, Xu Bin, Yan Zhen-Xin, Yang Lin. High-reliability automatic collision avoidance strategy for unmanned aerial vehicles based on sensing reconstruction. Acta Automatica Sinica, 2026, 52(2): 309−321 doi: 10.16383/j.aas.c250535
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250535
关键词
自动防撞,大气数据系统,姿态控制,威胁评估,风干扰
摘要
面向低空经济发展中无人飞行器对复杂空域安全飞行的需求, 系统考虑大气传感器在强风干扰下的失效问题, 并提出一种基于传感重构的高可靠自动防撞策略. 首先, 建立含湍流扰动的飞行器动力学模型, 采用自适应容积卡尔曼滤波融合导航量测与控制信号, 实现真空速与气流角等状态的鲁棒在线重构; 其次, 针对逃逸阶段的模型失配与噪声扰动, 设计智能学习自适应控制律补偿状态估计误差, 实现逃逸姿态指令稳定跟踪; 最后, 构建滤波协方差驱动的动态防撞包络, 结合控制系统模型量化轨迹预测不确定度, 完成地形碰撞检测, 并生成多逃逸轨迹择优避障指令. 仿真结果表明, 在突风与强湍流条件下, 可实现气流角精确重构及鲁棒防撞告警与改出控制, 相关技术可为低空无人飞行器防撞系统设计提供可靠的解决方案.
文章导读
低空经济作为战略性新兴产业, 正依托低空空域资源推动无人飞行器规模化应用[1-3]. 固定翼飞行器因航时长、效率高而广泛用于跨域物流与山区救援等任务, 但其高速巡航且难以悬停, 在低空密集障碍环境中碰撞风险显著增加[4-5]. 自动防撞系统依赖对飞行状态与威胁的实时感知与预测[6], 然而强风切变、湍流等风场会导致大气传感器测量失真甚至失效, 使真空速与气流角等关键状态偏离真实值, 从而削弱避障决策的可靠性[7]. 因此, 在大气传感异常条件下维持防撞系统可靠运行, 是低空安全领域的关键问题.
自动防撞的前提是准确预测飞行器的飞行轨迹, 当前研究方法可分为基于运动学模型、基于动力学积分及基于神经网络三大类[8]. 基于运动学模型的方法通常采用多模型框架, 通过建立多个运动子模型, 并考虑子模型间的交互作用, 以实现对目标的运动跟踪与预测. 该类方法并未深入考虑力学因素对飞行的影响, 因此在复杂机动状态下的预测精度受限[9-10]. 文献[12]采用基于六自由度运动方程的数值积分法预测飞机多条逃逸轨迹. 然而大气数据缺失导致升力、阻力等气动力计算失准, 引发模型输入条件不完备、模型与环境失配等问题, 严重制约预测精度. 基于神经网络的方法致力于克服模型驱动类方法的局限性. 文献[13]在空间栅格中引入模糊机制, 同时融合飞行器运动特性并结合长短期记忆(long short-term memory, LSTM)网络, 提出一种轨迹预测方法, 有效缓解栅格边界突变问题; 文献[14]将轨迹预测视为序列生成问题, 通过循环神经网络与混合密度网络联合建模, 实现对未来轨迹概率分布的估计; 文献[15]则结合卷积神经网络与LSTM网络, 实现民航飞行器的四维航迹预测. 然而此类方法极度依赖数据质量, 尤其在面对未知条件时泛化能力不足.
逃逸控制是飞行器实现自主改出操纵的核心技术. 在紊流风场环境下, 传感器失效与测量噪声的存在对其控制性能构成严峻挑战. 针对系统模型不确定性问题, 现有研究采用神经网络逼近未知非线性动力学特性, 并将逼近结果以前馈形式引入控制器, 从而提升轨迹跟踪精度[16-17]. 为进一步抑制风扰影响, 部分学者基于反步控制法设计鲁棒自适应控制方案, 通过补偿建模误差与外部干扰, 保障闭环系统的全局稳定性[18-19]. 上述方法通常假设系统状态可测且无噪声干扰, 与实际工程环境存在显著差异. 为此, 有研究提出采用基于连续模型的状态观测器, 以滤除传感器测量噪声并重构系统状态[20-21]. 文献[21]结合扩张状态观测器与自适应卡尔曼滤波器, 在风扰和噪声耦合条件下实现鲁棒跟踪控制. 然而, 在大气传感器失效条件下, 现有方法均将惯性气流角视为已知状态量, 而将由风场引起的附加气流角作为干扰项与其他未知项进行集总估计, 导致真实气流动力学与风场扰动难以解耦. 因此, 如何在实现真实气流角及风场扰动的解耦估计的同时满足控制精度要求, 仍是亟待突破的关键问题.
根据预警信息实现规避机动决策, 是民用航空器自动防撞技术的重要手段[22-24]. 针对自动防撞决策问题, 文献[25]提出基于多轨迹预测算法的小型无人机地面避碰系统, 通过地形扫描识别潜在威胁, 并基于预设安全范围生成规避路径. 进一步, 文献[26]研究分析不同系统集成方法、预测时间窗口及数据更新频率对防撞性能的影响, 表明预测精度与实时性是系统效能的关键制约因素. 上述方案依赖人为设定的固定安全阈值界定威胁区域, 然而静态阈值难以动态适应环境变化, 易导致避撞决策失效或过度保守. 为突破固定阈值的局限, 部分学者在多机冲突检测领域引入不确定度量化方法[27-28]. 文献[29]通过定义飞行器的时空可达集与潜在冲突空间, 构建冲突探测预方案, 实现对轨迹不确定性的显式表征; 文献[30]基于椭球体概率可达集描述飞行器位置分布, 结合机会约束优化与随机情景仿真, 依据可达集相交概率执行冲突检测, 提升决策鲁棒性; 文献[31]针对航空运输系统的意图与气象不确定性, 提出融合多模型的冲突检测与解决框架, 通过优化轨迹保障安全性. 但在自动防撞地领域目前鲜有研究, 现有模型难以精确量化强湍流或传感器故障导致的预测偏差, 影响冲突检测可靠性.
考虑大气传感器失效引发的环境干扰不确定与飞行状态不可测问题, 本文结合风场扰动下动力学特性与多源信息融合方法, 开展面向低空复杂环境的自主防撞鲁棒算法研究. 本文的主要贡献如下:
1)针对未知风场中飞行状态感知失准问题, 现有大气重构方法多采用标准动力学模型结合非线性滤波框架, 缺乏对未知风场的自适应能力. 本文在建立考虑大气紊流的动力学模型的基础上, 进一步引入过程噪声矩阵的在线调整以弱化对先验噪声统计的依赖, 使滤波结果提供状态估计与误差协方差信息, 为后续不确定度传播奠定基础.
2)针对环境干扰引起的姿态失稳问题, 本文不同于传统控制方法将风场附加力矩作为未知干扰与模型不确定进行集总估计, 而是通过大气重构及神经网络设计平行估计架构, 并提出权重自适应更新策略, 用于补偿滤波估计误差与未建模动态对姿态角速率跟踪的影响, 从而保证传感器异常条件下逃逸姿态指令的稳定跟踪.
3)面向低空复杂地形中避障决策的强鲁棒性需求, 现有逃逸轨迹扫描类方法采用固定安全阈值或包络尺寸, 难以随风场、模型误差变化自适应. 本文基于滤波估计误差协方差矩阵迭代预测未来轨迹包络, 对横向扫描范围与纵向安全阈值进行自适应调节, 从而实现面向传感不可靠与强扰动环境的、不确定度一致传播的闭环自动防撞框架.
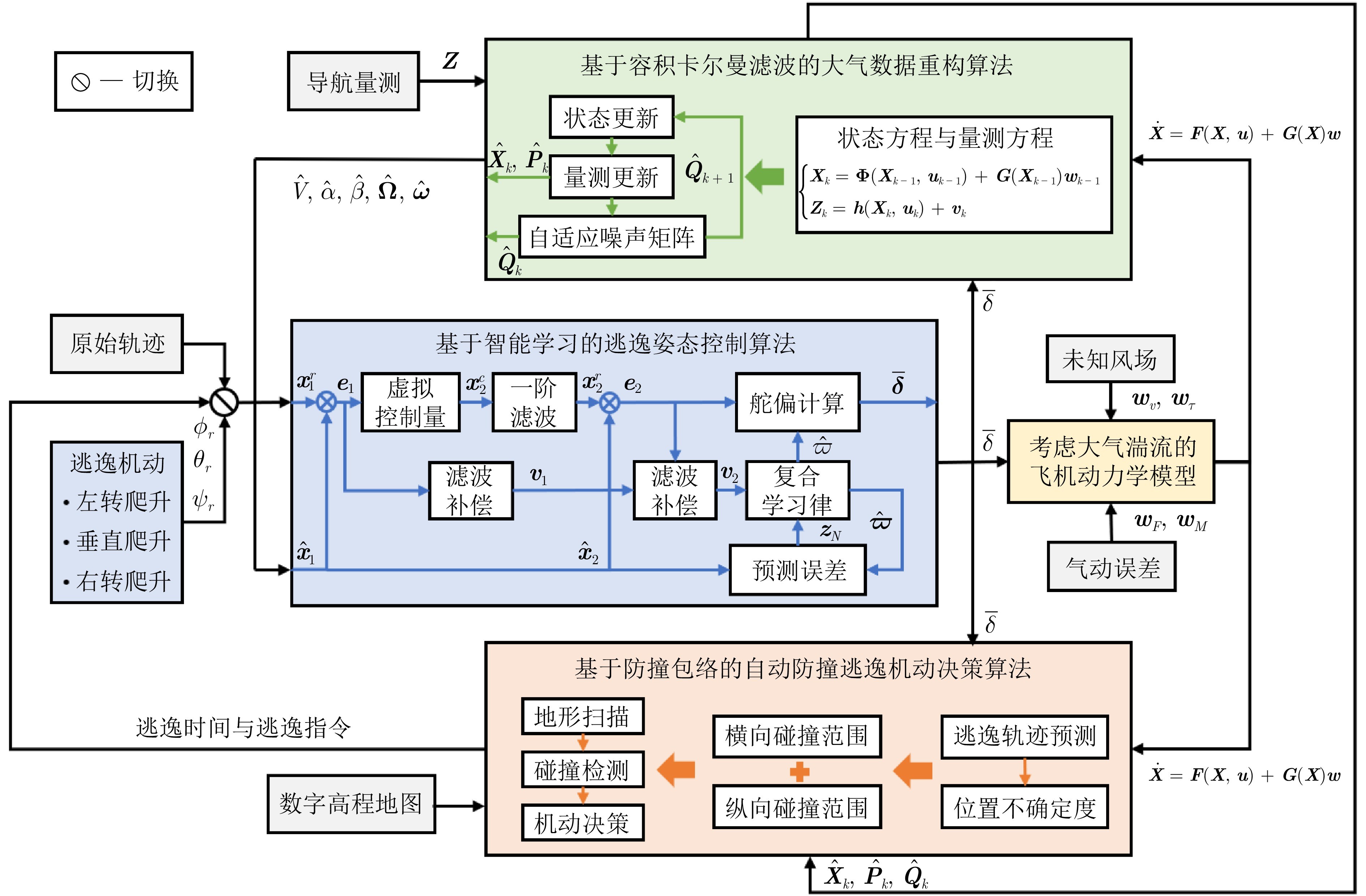
图1 基于传感重构的高可靠无人飞行器自动防撞策略的系统框图
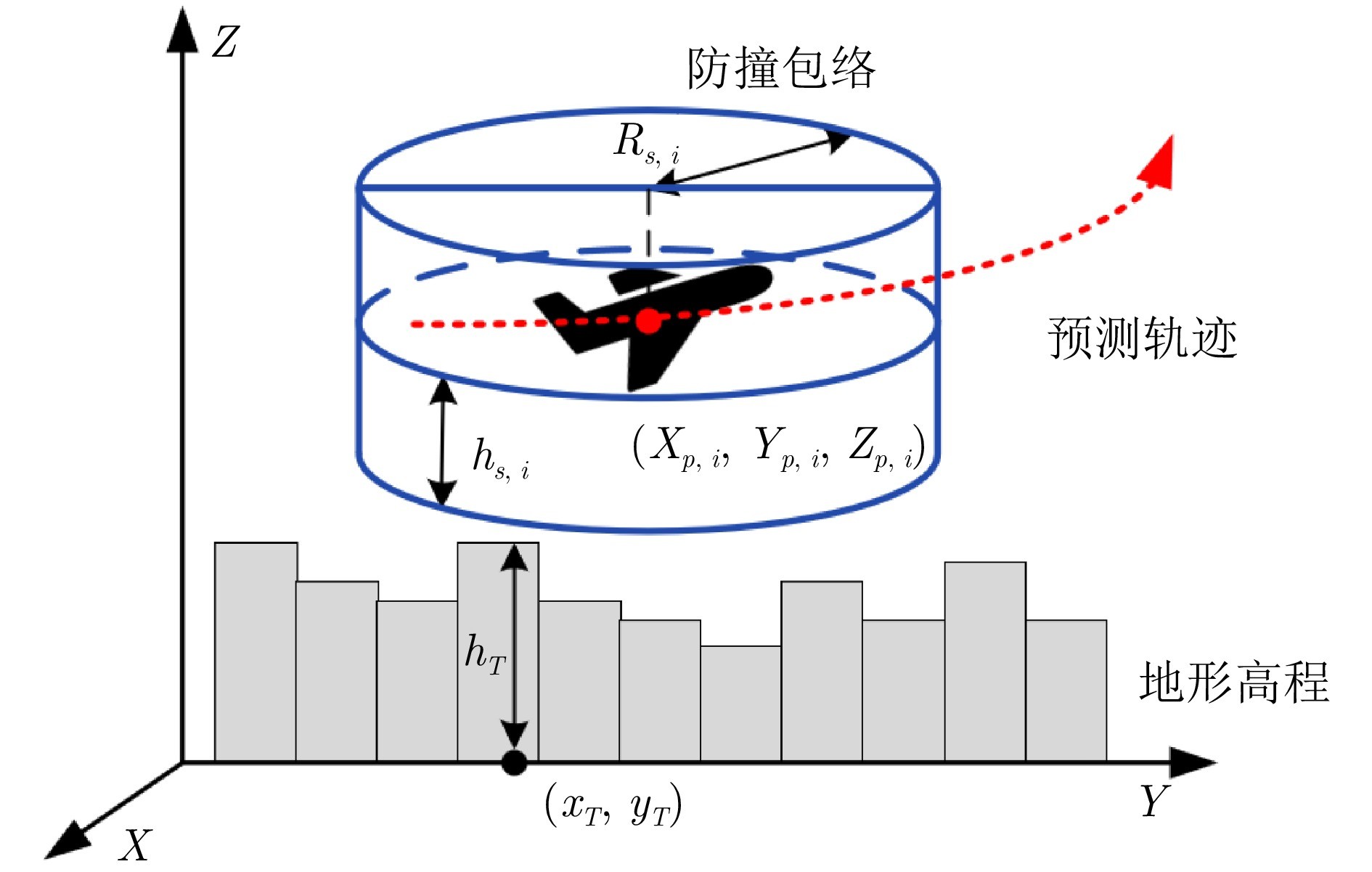
图2 飞机防撞包络
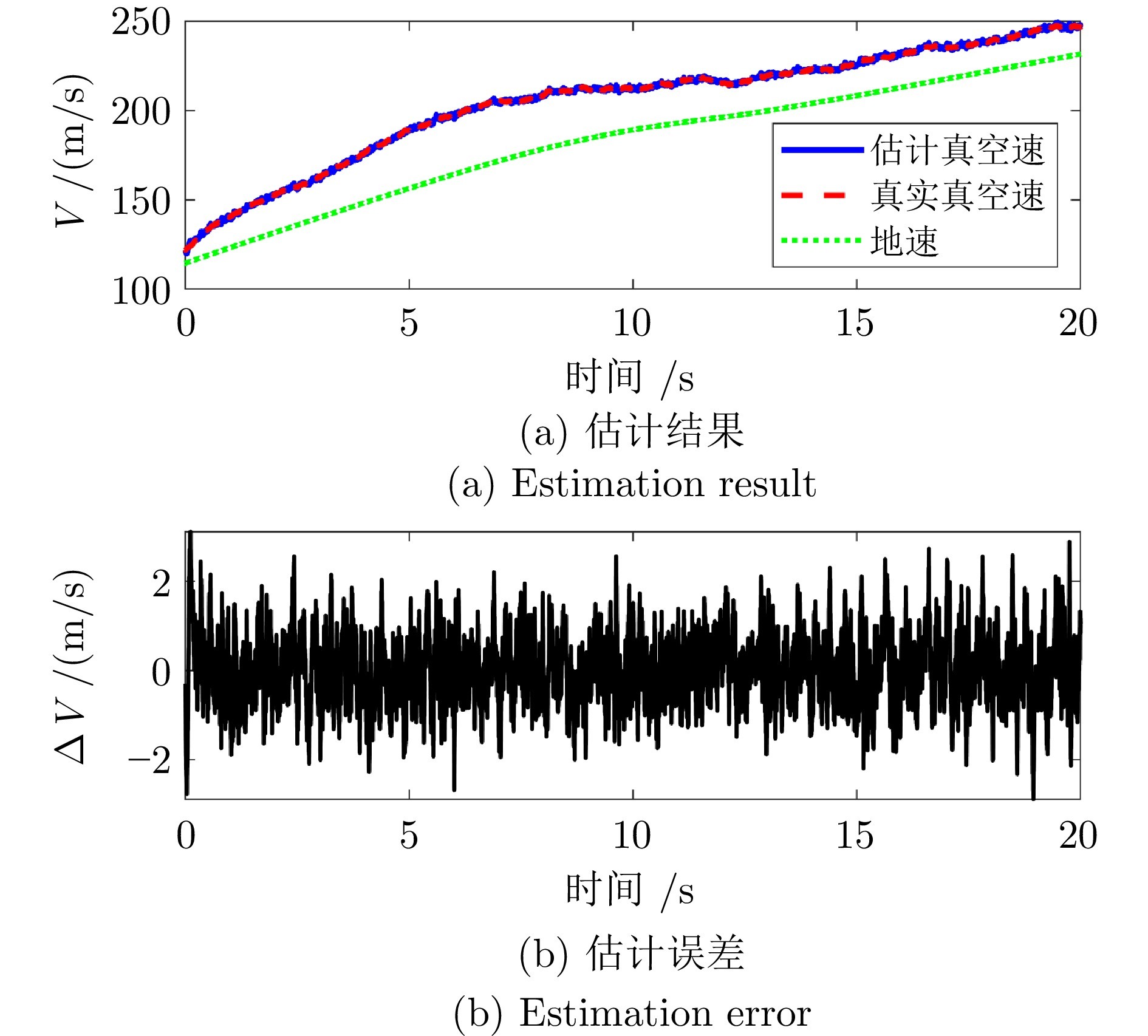
图3 真空速重构结果
针对固定翼无人机在传感器失效及低空强风场不确定性共同作用下的飞行安全问题, 本文开展了鲁棒自主防撞策略研究. 首先, 通过自适应容积卡尔曼滤波深度融合惯导与控制量, 实现真空速与气流角的在线高精度估计; 然后, 以径向基神经网络配合反步控制对集总扰动进行在线补偿, 保证逃逸姿态指令的稳定高精度跟踪; 最终, 利用滤波后验协方差迭代外推预测轨迹包络, 结合地形扫描形成防撞包络并执行多轨迹择优的逃逸决策. 仿真结果显示, 该策略在紊流与突风工况下可获得可靠的防撞告警与改出成功率, 显著提高近地飞行安全性.
然而, 当前研究中对地形障碍的建模主要依赖离线数字地图, 难以及时响应临时性或快速变化的障碍物. 未来研究应聚焦于融合机载雷达、视觉传感器的探测信息及数据链通信, 构建多源威胁图谱, 将检测或跟踪结果作为时变防撞包络输入决策层, 并结合跟踪误差、通信延迟及机动不确定性扩展安全裕度. 本文框架中轨迹预测与不确定度量化模块可直接扩展用于动态障碍物的冲突检测, 以实现对动态与非合作目标以及多无人飞行器集群场景的在线避撞. 此外, 还将通过无人机飞行实验, 对研究成果进行系统性的应用验证.
作者简介
李睿
西北工业大学自动化学院博士研究生. 分别于2021年和2024年获得西北工业大学学士和硕士学位. 主要研究方向为多源信息融合和飞行器避障控制. E-mail: liruinpu@mail.nwpu.edu.cn
许斌
西北工业大学自动化学院教授. 2006年获得西北工业大学学士学位, 2012年获得清华大学博士学位. 主要研究方向为智能控制, 自适应控制及其应用. 本文通信作者. E-mail: binxu@nwpu.edu.cn
阎振鑫
中国航空工业集团有限公司西安飞行自动控制研究所研究员. 主要研究方向为飞行控制系统设计. E-mail: yanzx@avic.com
杨林
成都飞机设计研究所研究员. 主要研究方向为飞行控制系统设计. E-mail: yangl062@avic.com
https://blog.sciencenet.cn/blog-3291369-1527147.html
上一篇:知识−数据−模型驱动的低空动目标轨迹融合预测方法
下一篇:螺旋桨转速受限多四旋翼无人机的编队运输分层控制方案