博文
螺旋桨转速受限多四旋翼无人机的编队运输分层控制方案
|
引用本文
武权伟, 王翔宇, 刘金浩. 螺旋桨转速受限多四旋翼无人机的编队运输分层控制方案. 自动化学报, 2026, 52(2): 322−334 doi: 10.16383/j.aas.c250439
Wu Quan-Wei, Wang Xiang-Yu, Liu Jin-Hao. A hierarchical control scheme for formation transportation of multiple quadrotors with propeller speed constraints. Acta Automatica Sinica, 2026, 52(2): 322−334 doi: 10.16383/j.aas.c250439
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250439
关键词
多四旋翼无人机,协同编队运输,螺旋桨转速约束,分层控制,抗干扰控制,非线性模型预测控制
摘要
多四旋翼无人机协同编队运输技术因其高容错性和强灵活性等特点, 近年来受到广泛关注. 针对受到螺旋桨转速约束和外界环境干扰影响的多四旋翼无人机系统, 提出一种分层控制方案以实现多无人机协同编队运输. 该方案设计主要包含分布式协调器设计和跟踪控制器设计. 在分布式协调器中, 位置协调器基于虚拟领导者的位置、速度等信息生成各带载无人机的期望位置, 然后由微分平坦器输出无人机的期望无偏轨迹; 跟踪控制器采用非线性模型预测控制、角速度控制以及螺旋桨转速分配算法相结合的策略, 为各带载无人机生成合理的螺旋桨转速指令, 确保无人机精确跟踪其期望轨迹. 在所提方案作用下, 多带载无人机能维持期望编队队形并跟踪虚拟领导者, 从而实现多无人机协同编队运输. 特别地, 当省略位置协调器时, 该方案可简化为单无人机轨迹跟踪控制器. 数值仿真包括单机轨迹跟踪和多机协同运输两个场景, 结果表明, 在单机跟踪任务中, 所提方案展现出良好的跟踪精度; 在多机运输场景下, 多无人机系统能够有效实现协同编队运输.
文章导读
近年来, 基于四旋翼无人机的货物运输系统在智能物流等领域获得广泛关注并展现出较大的应用潜力[1–5]. 相比于传统的单无人机运输模式, 多无人机协同运输模式在运输效率、可靠性以及系统容错性等方面具有显著优势[3–4]. 例如, 多无人机系统可并行作业, 大幅提升单位时间内的运输量, 从而提高运输效率. 这些优势使得多无人机运输在应急物资配送、偏远地区物流等应用场景中具有重要的实用价值.
多无人机协同运输主要有两种模式: 1) 多无人机联合吊运单一大型货物[5–6]; 2) 分布式载运模式, 即各无人机独立运输货物的组成部分并通过协同编队完成整体运输任务[7]. 相较于联合吊运模式, 分布式协同编队运输具有以下优势: 一方面, 编队系统具有更强的容错能力, 单一节点故障不会导致任务失败; 另一方面, 该模式更适应复杂地形环境, 可通过动态重构编队实现避障, 提升运输灵活性. 多无人机分布式载运模式的关键技术之一为多无人机协同编队控制技术.
针对多无人机协同编队控制问题, 国内外学者已开展研究并取得丰富成果[8–12]. 文献[9]针对无人机位置子系统, 基于控制障碍函数和预设性能控制等方法, 提出一种安全编队框架, 实现了多无人机在复杂环境下的编队. 文献[10]考虑带有时延的无人机位置环和姿态环模型, 提出一种简化的多无人机编队控制器设计框架. 进一步, 一些学者研究了外界干扰对多无人机协同编队的影响. 文献[12]针对外界环境干扰影响下的多无人机系统, 提出一种次优H∞编队控制器. 与文献[12]中直接对干扰进行压制不同, 文献[13]基于主动抗干扰控制理论, 设计一种基于干扰观测器的分布式编队控制算法, 实现了外界环境干扰影响下的多无人机高精度编队. 文献[14]同时考虑外界干扰对多无人机位置和姿态的影响, 设计一种基于干扰观测器的安全编队控制算法, 解决了狭小空间下的多无人机编队问题.
在实际应用中, 多无人机系统不仅需要应对外界干扰, 还需要处理各种物理约束条件[15–20]. 文献[17]研究线速度约束和输入约束下多无人机系统的编队控制问题, 提出一种分布式编队控制器. 针对受速度约束、加速度约束和输入约束的多无人机系统, 文献[18]提出一种编队控制算法, 实现了切换拓扑下多无人机编队. 文献[19]进一步考虑无人机的姿态环模型, 针对受到推力约束和力矩约束的多无人机系统, 结合事件触发机制与命令滤波反步法, 设计一种自适应编队控制算法. 需要指出的是, 无人机推力和力矩约束本质上源于螺旋桨转速约束, 且二者存在耦合关系. 现有研究大多将推力和力矩作为独立约束处理, 独立约束通常采用较为保守的边界, 其中, 推力–力矩的可行域是一个矩形, 但实际推力–力矩可行域比这个矩形范围要大. 因此, 采用独立约束在充分发挥无人机机动性能等方面还有提升空间. 为此, 本文从螺旋桨转速约束这一本质特性出发, 研究多无人机协同编队控制问题, 以充分地挖掘无人机的机动潜能.
值得注意的是, 不少无人机编队控制算法都是直接基于编队误差进行设计的. 虽然这种设计方法是解决编队控制问题的常见方法, 但在复杂性和灵活性等方面仍存在改进的空间. 一方面, 这种方法将协同控制与个体控制问题耦合, 当需要同时满足多种约束条件、抗干扰等多项功能要求时, 编队控制算法的设计难度会随功能需求的增加而成倍增加; 另一方面, 若需为无人机新增避障、避碰等新功能, 往往需对整个编队控制算法进行重新设计, 且当无人机的控制器被封装时, 算法将难以部署实施.
为解决传统编队控制设计方法存在的局限性, 嵌入式控制技术提供了一种可行的解决思路[21]. 嵌入式控制技术采用分层设计理念, 将单个智能体的控制与多个体之间的协作“解耦”. 其通过构建一个分布式协调器来协调各智能体的参考输入以实现多个体之间的协作. 然后, 设计单个体控制器使得各智能体跟踪上其参考输入. 通过这种“解耦”方式, 不仅降低了多智能体系统编队算法设计的复杂度, 还具有良好的可扩展性[22]. 近年来, 嵌入式控制技术主要被应用于多智能体系统的分布式协同控制和分布式优化领域[23–28].
本文利用嵌入式技术的分层思想并结合非线性模型预测控制(nonlinear model predictive control, NMPC)技术提出一种分层控制方案, 解决了受外部干扰影响和螺旋桨约束的多无人机协同编队运输控制问题. 所提分层控制框架包含分布式协调器和跟踪控制器: 分布式协调器以领导者的位置、各无人机的初始位置等信息为各无人机规划期望位置, 并利用微分平坦理论[29]生成各无人机的无偏期望轨迹. 跟踪控制器融合干扰观测器、NMPC算法、角速度控制器和螺旋桨转速分配算法. 在跟踪控制器的作用下, 携带负载的无人机即使面临螺旋桨转速约束和外部干扰, 仍能跟踪其期望轨迹, 从而完成编队运输任务. 值得注意的是, 本方案在分层架构设计中引入信息交互机制: 分布式协调器可实时调用跟踪控制器输出的干扰估计等信息, 动态调整期望轨迹, 为NMPC优化问题提供更精确的参考轨迹. 所提方案不仅能用于多无人机协同编队运输, 还能用于单无人机轨迹跟踪任务. 文献[30]也利用NMPC算法实现了外部干扰影响下的单无人机轨迹跟踪任务. 与之不同, 所提方案通过考虑无人机螺旋桨转速约束来挖掘无人机性能的同时, 还通过生成无偏轨迹以提高跟踪控制精度. 本文所提分层控制框架具有以下优势:
● 解耦设计. 该分层控制方案将单个无人机控制和多无人机之间的协作“解耦”, 具有设计方便、可拓展性高等优势.
● 精准编队控制. 基于无人机的微分平坦特性, 将期望位置及其(高阶)导数信息、干扰估计值等信息转换为NMPC算法所需的无偏期望轨迹, 并自适应调整NMPC算法状态误差权重和输入权重, 从而实现多无人机精准编队控制.
● 性能优化. 融合了NMPC算法、角度速度控制器和螺旋桨转速分配算法, 在严格满足螺旋桨转速约束的前提下, 充分挖掘无人机的运动潜能.
本文内容安排为: 第1节给出预备知识并对所研究的多无人机协同编队运输问题进行描述. 第2节设计分层控制方案, 其包含分布式协调器和跟踪控制器. 第3节利用有限时间理论、Lyapunov定理等工具对闭环系统进行稳定性分析. 第4节展示单无人机轨迹跟踪控制和多无人机协同编队运输仿真结果. 第5节对本文设计进行总结并展望未来工作.
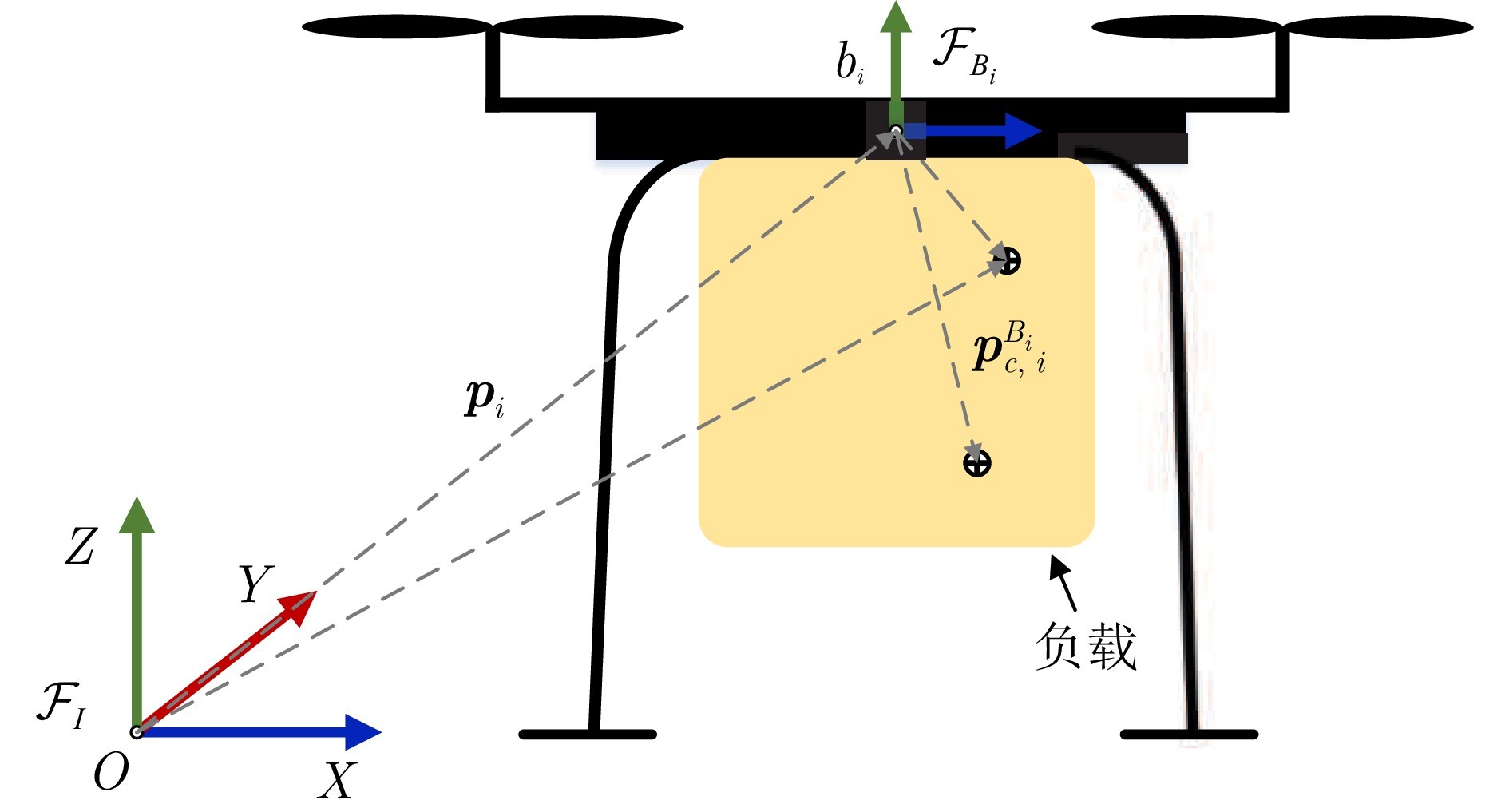
图1 携带负载的四旋翼无人机示意图
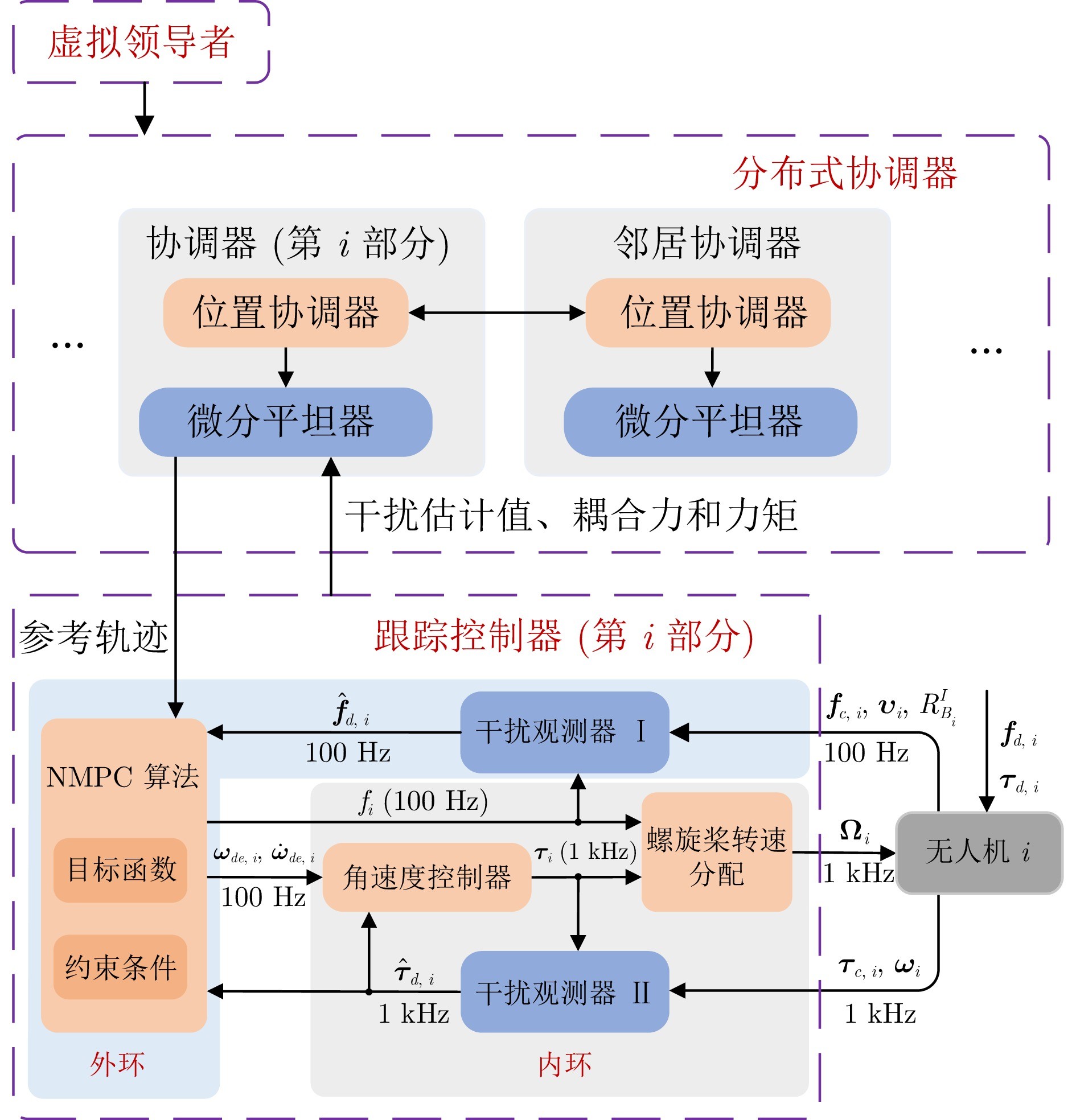
图2 分层控制方案设计结构图
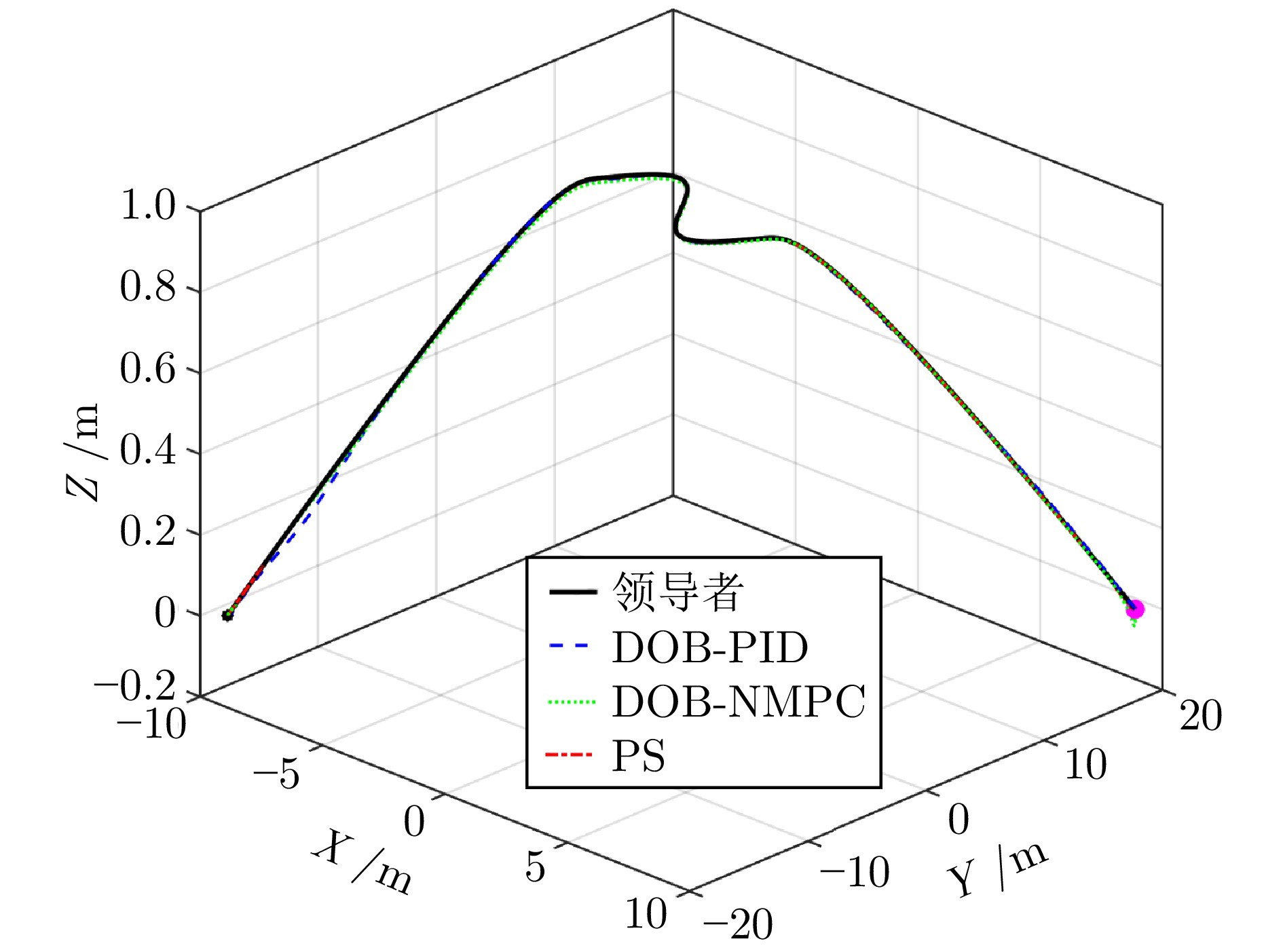
图3 无人机1和虚拟领导者的轨迹
本文针对受螺旋桨转速约束和外界干扰影响的多四旋翼无人机协同编队运输问题, 提出一种分层控制方案. 该方案采用分布式协调器和跟踪控制器相结合的思路: 包含位置协调器和微分平坦器的分布式协调器为各无人机生成无偏期望轨迹, 而跟踪控制器通过NMPC算法、角速度控制器及螺旋桨转速分配算法, 确保无人机能跟踪上其期望轨迹. 针对无人机的螺旋桨转速约束, 基于所设计的角速度控制器, 推导出NMPC算法的状态约束条件. 在角速度控制器的作用下, 角速度收敛至期望角速度时, 无人机的螺旋桨转速严格满足约束条件. 此外, 采用了螺旋桨转速分配算法来避免角速度在收敛过程中可能出现的螺旋桨转速越界现象. 仿真表明, 所提方案在单机轨迹跟踪任务中具有良好的跟踪精度, 在多机协同运输场景下能有效维持期望编队队形并跟踪虚拟领导者. 未来研究将进一步探索虚拟领导者轨迹的优化策略等方向, 以期进一步降低多无人机系统在执行任务过程中的编队误差, 提升协同控制性能.
作者简介
武权伟
东南大学自动化学院博士研究生. 主要研究方向为多机器人协同规划与控制技术. E-mail: w_qw@seu.edu.cn
王翔宇
东南大学自动化学院教授.主要研究方向为非光滑控制, 抗干扰控制及在多机器人协同系统、电力电子系统中的应用. 本文通信作者. E-mail: w.x.y@seu.edu.cn
刘金浩
中国矿业大学信息与控制工程学院博士后研究员. 主要研究方向为抗干扰控制, 模型预测控制及其在运动控制系统与机器人系统中的应用. E-mail: liujinhao@cumt.edu.cn
https://blog.sciencenet.cn/blog-3291369-1527149.html
上一篇:基于传感重构的高可靠无人飞行器自动防撞策略
下一篇:多障碍场景下基于多策略进化机制的无人机三维路径规划
