博文
多障碍场景下基于多策略进化机制的无人机三维路径规划
|
引用本文
朱润泽, 赵静, 陆宁云, 马亚杰, 宋来收. 多障碍场景下基于多策略进化机制的无人机三维路径规划. 自动化学报, 2026, 52(2): 335−348 doi: 10.16383/j.aas.c250319
Zhu Run-Ze, Zhao Jing, Lu Ning-Yun, Ma Ya-Jie, Song Lai-Shou. Multi-strategy evolutionary mechanism for UAV 3D path planning in multi-obstacle environments. Acta Automatica Sinica, 2026, 52(2): 335−348 doi: 10.16383/j.aas.c250319
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250319
关键词
无人机,三维路径规划,粒子群算法,多策略进化
摘要
针对无人机在三维多障碍物场景下路径规划存在的收敛精度低、稳定性不足等问题, 提出一种多策略进化粒子群算法(MSEPSO). 在初始化阶段, 针对粒子群算法对粒子初始位置敏感的问题, 采用拉丁超立方采样优化粒子初始分布, 提高种群多样性; 在进化阶段, 设计“平衡−记忆−增强”进化框架, 即利用非线性迭代策略来平衡全局开发和局部搜索, 采用个体历史记忆启发机制增强算法的全局开发能力, 并引入进化粒子, 增强种群对于群体极值附近空间的探索能力, 降低算法陷入局部最优的概率. 在CEC2020测试函数集上与山地/城市场景下的对比实验结果表明, MSEPSO展现出稳定的寻优性能, 可以规划长度更短、平滑度更高的安全路径.
文章导读
随着“低空经济”的蓬勃发展, 无人机凭借其外形灵活、体积小巧、适应性强等显著优势[1], 在消防安全[2]、侦察监视[3]、城市物流[4]等诸多领域得到广泛应用[5−6]. 面对日益复杂的任务需求, 无人机需要适应多变且充满挑战的作业场景. 路径规划作为无人机执行任务成功的核心技术, 受到越来越多的重视. 特别是在多障碍物密集分布的复杂场景下, 规划一条安全、高质量的全局路径, 已成为无人机顺利完成任务的重要保障[7]. 因此, 设计一种能够有效应对复杂环境的全局路径规划算法, 使无人机具备稳定规划高收敛精度路径的能力, 具有重要的理论价值与现实意义.
PSO作为群体智能算法中的一种经典算法, 原 理是基于粒子个体的最佳历史经验以及种群最优粒子的引导进行寻优, 具有结构简单、收敛速度快且算法实现容易等优点[22], 受到很多研究人员的青睐. 目前, PSO已经广泛应用于路径规划[23−25]领域. 但是, 在解决无人机三维路径规划问题时, 暴露出该算法的缺点. 例如, 当搜索空间较大, 因寻优难度增大, 导致精度降低, 无法规划出一条高质量的全局路径; 更重要的是, 其进化方式单一, 导致种群多样性在迭代中快速流失, 使算法易陷入局部最优解而无法适应复杂多变的三维多障碍物场景.
针对上述PSO在路径规划问题时的局限性, 近几年学者们尝试不同的改进策略. Haris和Nam[26]受到神经网络激活函数的启发, 使用sigmoid函数自适应地更新惯性权重, 使算法具有更快的收敛速度. Liu等[27]引入规避、平滑以及协调算子, 通过缩小搜索空间加快算法的收敛速度. Wang等[28]针对特定场景, 综合考虑多目标优化, 计算合理的可行路径的数量, 提升了PSO的优化能力. Yu等[29]通过融合模拟退火算法, 使PSO具有更完备的更新策略, 减少进化过程中粒子的振荡现象, 增强算法在全局路径规划时的寻优能力. Lin等[30]融合遗传算法, 提出粒子群−遗传算法, 增强了粒子群在路径规划时的多样性, 使机器人可以获得长度较短、平滑度较高的路径. Huang等[11]基于圆柱矢量、差分进化算子以及分段式权重提出ACVDEPSO (adaptive cylinder vector particle swarm optimization), 使无人机可以生成更高质量的航迹. 上述针对不同场景下的路径规划的成果, 改进策略主要体现在优化初始分布、改进迭代策略以及算法的融合上, 虽在一定程度上提高算法的寻优性能, 但是依然存在几点被忽略的问题:
1)问题1. 在算法初始化阶段, 忽略了粒子初始分布对于算法寻优性能的影响. PSO算法具有初始敏感性, 高质量的初始位置分布能够有效提高粒子群的种群多样性, 从而增强算法在高维解空间中的探索效率和开发潜力. 目前, 常用的初始化方法主要有两类: 一是随机初始化策略, 虽实现简单, 但其随机性可能导致粒子的初始分布不均匀, 影响算法的稳定性; 二是基于混沌映射的初始化策略, 该策略被广泛用于粒子群的初始化, 但是具体到路径规划问题, 由于不动点的影响, 容易导致粒子出现聚集现象, 影响算法的寻优能力.
2)问题2. 在算法进化阶段, 未综合权衡全局开发与局部探索对于算法收敛精度和鲁棒性的影响. 优异的全局开发能力能够有效引导粒子群进行覆盖搜索, 防止算法过早收敛于次优解; 而强大的局部探索能力则有助于粒子在解空间中进行精细搜索, 降低陷入局部最优的可能性. 此外, 算法在进化过程的不同阶段需要有效的自适应机制来动态调整权重分配, 以确保算法能够高效、稳健地完成寻优任务.
受到以上问题启发, 本文提出一种基于多策略进化的粒子群算法, 通过拉丁超立方采样(Latin hypercube sampling, LHS) 改善粒子初始分布, 提出“平衡−记忆−增强”进化框架增强算法的整体寻优性能, 使无人机在多障碍物三维环境下能够稳定规划出质量较高的路径. 本文主要工作如下:
1) 针对问题1, 本文创新地引入LHS初始粒子位置. 相比传统的随机函数和混沌映射的初始化方式, LHS可以对解空间进行分层均匀采样, 避免传统方法导致的粒子聚集现象, 从而优化粒子的初始分布, 保证初始种群的多样性, 为后续算法进化提供更有竞争力的初始状态. LHS将在三维空间各坐标轴独立执行等概率分层抽样, 并随机组合层内采样值生成粒子坐标, 上述策略可以确保粒子均匀地分布在三维地图中, 为后续规划一条高质量的全局路径打下良好基础.
2) 针对问题2, 本文提出一种“平衡−记忆−增强”的进化框架, 旨在使算法可以兼具良好的全局开发和局部搜索能力, 同时可以兼顾进化过程中不同阶段的需要, 规划出最佳全局路径. 上述框架主要包括以下三个部分: 针对传统方法中使用固定权重导致迭代过程中无法动态平衡全局开发和局部探索这一问题, 本文设计“平衡”策略, 即采用非线性公式使算法可以自适应地平衡开发和探索需要; 针对现有算法多数忽略历史信息启发作用的缺陷, 本文设计“记忆”策略, 即基于个体历史记忆启发机制 (personal history memory mechanism, PHMM)策略, 将粒子个体历史记忆融入算法迭代过程中, 使种群的信息来源更加丰富, 有效增强算法的全局开发能力; 针对算法局部探索能力不足的难题, 本文设计“增强”策略, 通过引入进化粒子增强局部探索能力, 进化粒子将对群体极值附近空间进行二次局部探索, 使算法尽可能逼近最优解. 综上, “平衡”策略用于动态调节全局开发和局部探索权重, “记忆”策略用于增强算法的全局开发能力, “增强”策略增强算法的局部搜索能力, 三种策略协同发挥作用, 确保无人机规划出一条较高质量的全局路径.
3)为验证所提算法的有效性, 本文分别进行基于CEC2020测试集的数值实验和基于多场景的路径规划仿真实验. 基于CEC2020测试集的数值实验评估本文算法在标准测试函数中的寻优性能. 在路径规划仿真实验阶段, 分别在两种城市环境和两种山地场景下进行对比实验, 考察算法在三维路径规划问题中的适应能力. 实验结果与分析充分证明MSEPSO (multi-strategy evolutionary particle swarm optimization)在多障碍物场景下无人机三维路径规划的有效性和稳定性.
本文的其余部分组织如下. 第1节将介绍本文的准备工作, 主要包括环境建模、适应度函数设计以及PSO简介. 第2节将详细介绍MSEPSO. 第3节将基于CEC2020测试集以及山地、城市场景开展仿真对比实验, 并对实验结果进行分析. 第4节将给出本文的工作总结与展望.
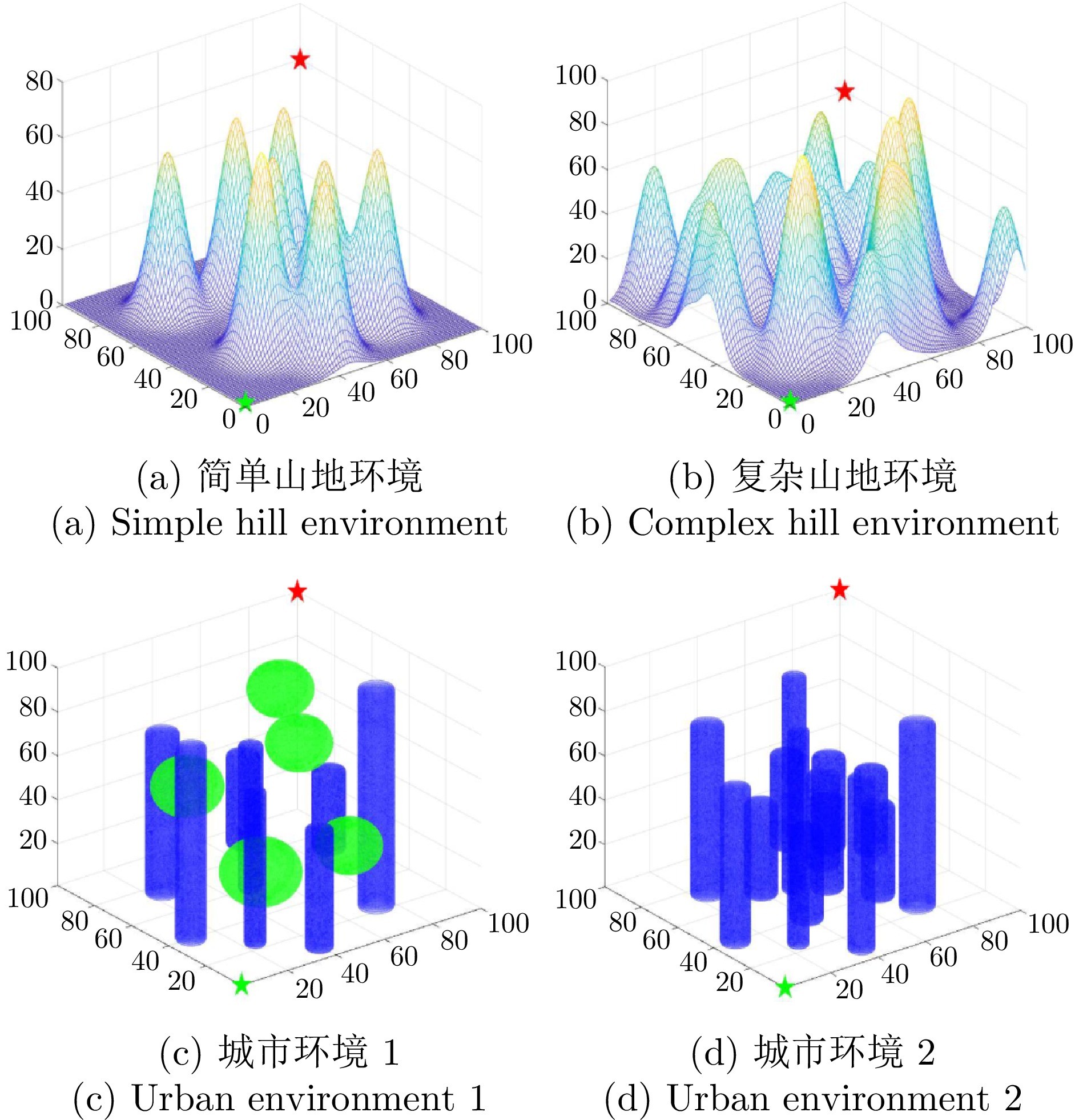
图1 环境建模
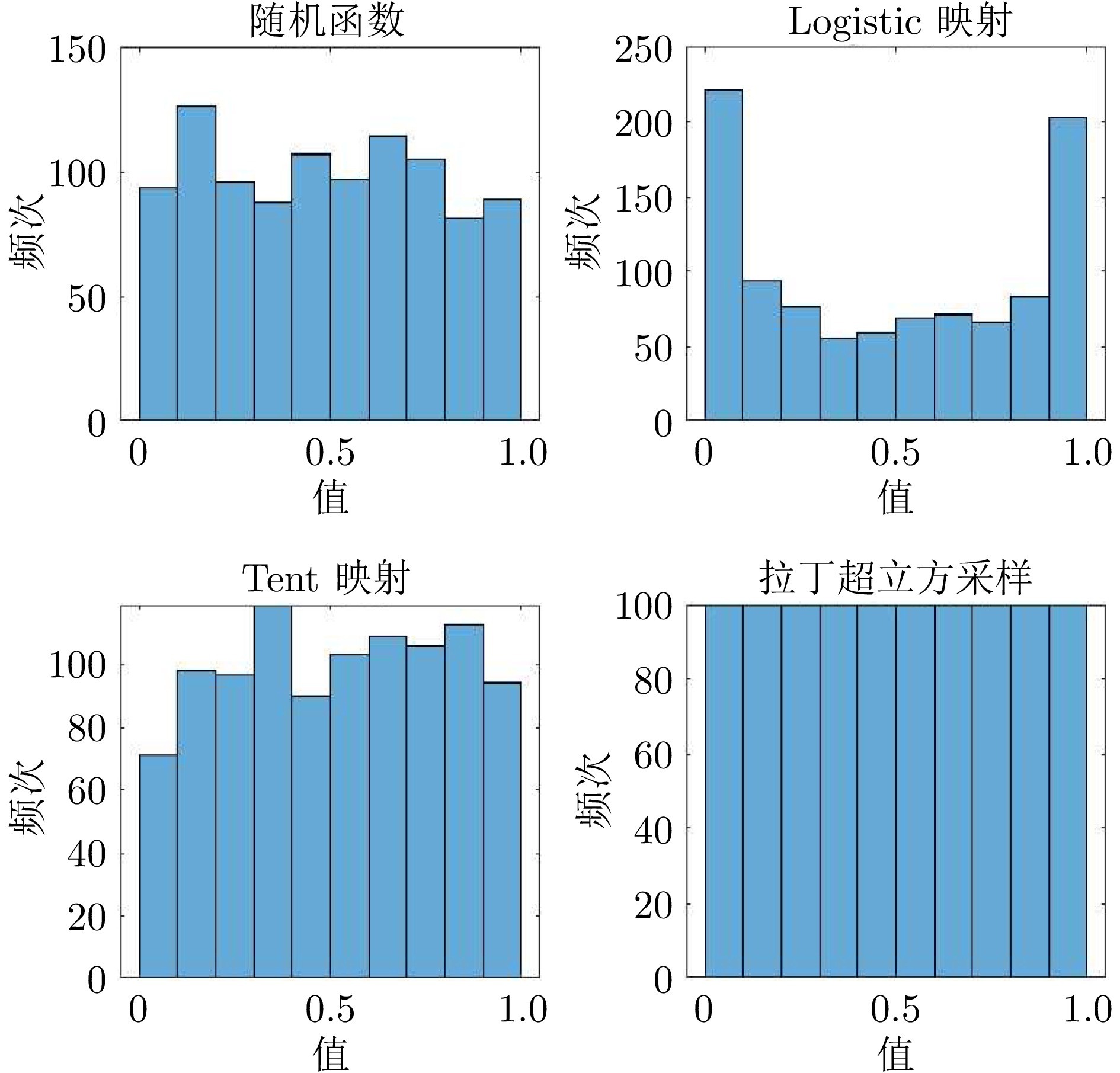
图2 基于不同采样策略生成1000个随机数
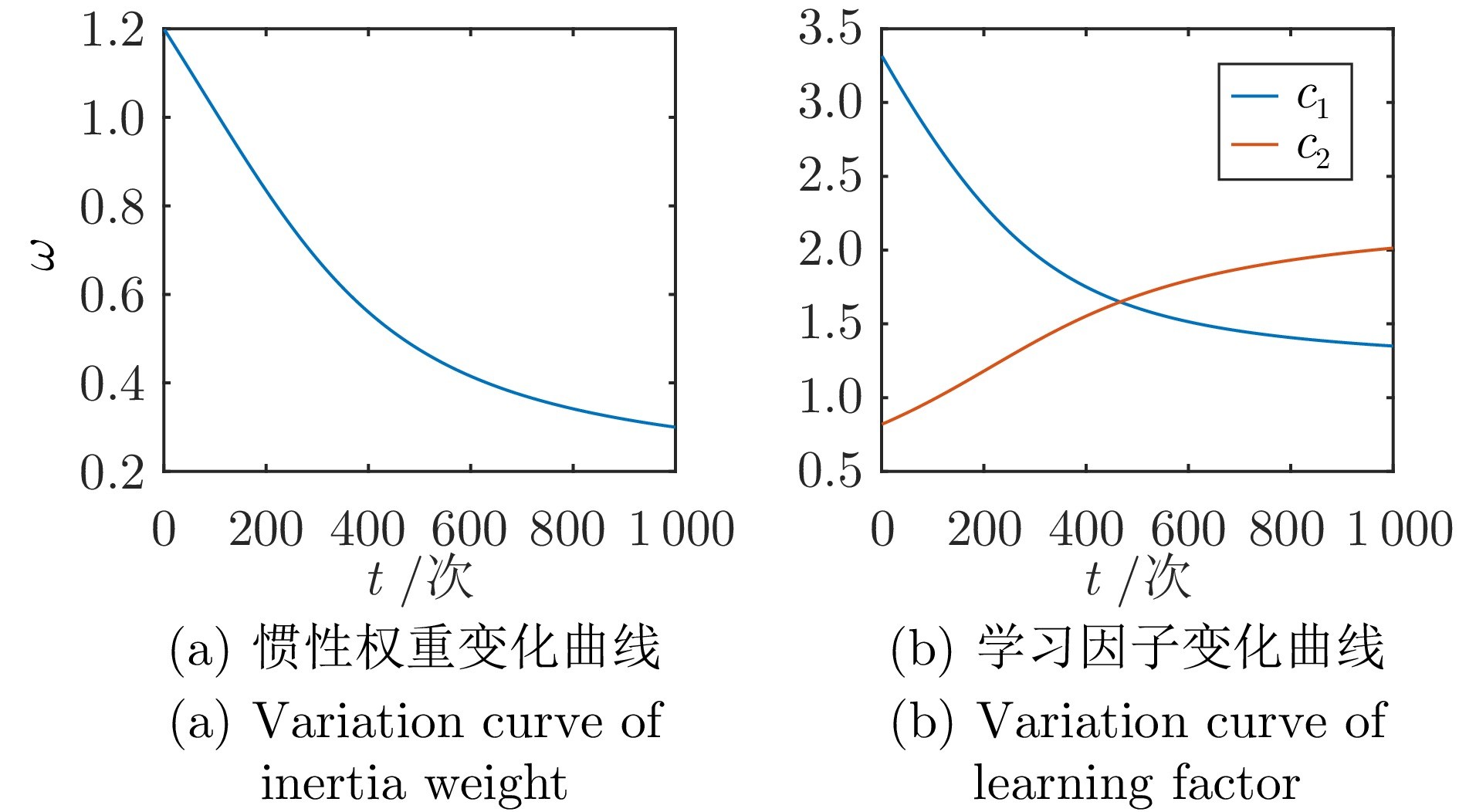
图3 参数非线性迭代策略
本文研究了多障碍场景下的无人机三维路径规划问题, 在优化种群初始分布和进化策略的基础上提出MSEPSO, 基于LHS优化粒子初始分布, 增加种群多样性. 设计“平衡−记忆−增强”进化框架, 通过多策略协同平衡算法的全局开发与局部探索需求, 同时增强算法的全局开发与局部搜索能力. CEC2020测试集上的数值实验表明MSEPSO在不同类型的寻优问题中均具有较强的竞争力. 进一步, 四种不同场景下的仿真实验表明, MSEPSO在多障碍三维场景下具备较好、较为稳定的寻优能力, 能够有效避免算法陷入局部最优, 可以快速规划出一条质量较高的全局路径, 验证了算法的有效性和鲁棒性. 然而, 该算法作为一种全局规划算法, 在复杂动态环境下的避障成功率略低, 因此研究局部路径规划算法并致力于在真实环境测试是我们未来工作之一.
作者简介
朱润泽
南京邮电大学硕士研究生. 2023年获得南通大学学士学位. 主要研究方向为机器人路径规划. E-mail: 19850968797@163.com
赵静
南京邮电大学自动化学院副教授. 2014年获得南京航空航天大学博士学位. 主要研究方向为智能无人系统, 旋翼无人机的容错控制. 本文通信作者. E-mail: zhaojing@njupt.edu.cn
陆宁云
南京航空航天大学自动化学院教授. 2004年获得东北大学博士学位. 主要研究方向为故障诊断和寿命预测. E-mail: luningyun@nuaa.edu.cn
马亚杰
南京航空航天大学自动化学院教授. 2015年获得南京航空航天大学博士学位. 主要研究方向为飞行器智能故障诊断与容错控制, 多智能体系统任务规划. E-mail: yajiema@nuaa.edu.cn
宋来收
南京航空航天大学自动化学院副研究员. 2014年获得南京航空航天大学博士学位. 主要研究方向为旋翼机动力学及结构设计. E-mail: lss05012@nuaa.edu.cn
https://blog.sciencenet.cn/blog-3291369-1528002.html
上一篇:螺旋桨转速受限多四旋翼无人机的编队运输分层控制方案
下一篇:基于空−海−潜跨域无人平台协同的海上目标探测追踪策略
