博文
基于空−海−潜跨域无人平台协同的海上目标探测追踪策略
|
引用本文
田泽兴, 闫敬, 高麒媛, 杨晛, 关新平. 基于空−海−潜跨域无人平台协同的海上目标探测追踪策略. 自动化学报, 2026, 52(2): 349−362 doi: 10.16383/j.aas.c250438
Tian Ze-Xing, Yan Jing, Gao Qi-Yuan, Yang Xian, Guan Xin-Ping. Maritime target detection and tracking strategy based on the collaboration of air-sea-submarine cross-domain unmanned platform. Acta Automatica Sinica, 2026, 52(2): 349−362 doi: 10.16383/j.aas.c250438
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250438
关键词
探测,追踪,跨域无人平台,避障,逆强化学习
摘要
提出一种基于空−海−潜跨域无人平台协同的海上目标探测追踪策略. 首先, 构建无人机−水面艇−潜器协同的海上跨域无人系统. 然后, 针对海上目标的高机动性以及无人平台自身约束, 采用测度理论解析无人机−水面艇−潜器最佳探测编队队形, 实现目标探测概率最大化; 当探测到目标后, 设计基于逆强化学习的无人机−水面艇−潜器编队控制器, 实现障碍物环境下水面/水下目标的可靠有效追踪. 最后, 通过仿真与实验验证了所提方法的有效性. 结果表明, 所提探测模式可以实现有限时间内移动目标探测概率最大化, 同时所提逆强化学习编队控制器可以在保持队形稳定的基础上, 结合动态避障策略, 实现复杂环境下跨域无人平台安全协同追踪.
文章导读
海洋覆盖地球表面积的71%, 是人类赖以生存和发展的重要资源与战略空间. 随着海洋信息处理与装备制造等技术的快速发展, 大量具有观测和执行能力的无人机(unmanned aerial vehicle, UAV)、水面艇(unmanned surface vessel, USV)、潜器(autonomous underwater vehicle, AUV)等设备部署于监测水域, 通过信息获取、通信传输与协同控制等相互作用, 构成空–海–潜跨域无人系统. 这类系统通过探测、感知与协同作业, 可完成复杂海洋任务[1]. 在上述系统中, 目标探测追踪作为跨域无人系统环境感知、自主决策与协同行动的基石, 对提升海洋资源勘探、安全巡逻及应急救援等任务的高效性与安全性具有不可替代的重要作用.
目前, 一些学者对海上目标探测技术进行研究. 例如, Cui等[2]对搭载双目相机的潜器开发一种基于深度学习的水下目标检测算法. Wang等[3]通过在潜器上搭载侧扫声呐, 对水下目标进行探测. 然而, 上述方法采用单点探测, 导致水下目标探测范围与探测效率受限. 为此, 文献[4]在水下部署多个搭载拖曳声呐的潜器以构建水下探测网络. Chen等[5]开发多水面艇协同水上目标探测框架, 以实现海上未知目标的方位估计. Tang等[6]利用无人机编队广域搜索的特点, 对水面小目标进行精准探测. 然而, 文献[4-6]所提方法均基于单一域无人平台组网, 无法对水面、水下目标进行全域协同探测. 为此, 文献[7-8]分别开发无人机与水面艇协同、水面艇与潜器协同的海上目标探测框架. 进一步, 文献[9]提出一种基于无人机–水面艇–潜器协同的海上目标探测方案. 然而, 文献[7-9]采用随机探测模式, 导致目标探测概率低, 无法保证探测效率. 为此, Yan等[10]采用测度理论解析跨域无人平台最佳探测编队队形, 实现目标探测概率最大化. 然而, 上述工作忽略了海上移动目标的机动性, 同时没有考虑无人平台续航时间等约束. 因此, 在有限时间和动态海洋环境下, 实现海上移动目标探测概率最大化, 仍是亟须解决的问题.
在探测到海上目标后, 下一个要解决的是跨域无人平台编队协同控制问题. 目前已经提出许多编队控制方法, 例如滑模控制[11]、模糊控制[12]与模型预测控制[13]等. 然而, 文献[11−13]所提出的方法并未充分考虑跨域无人平台协同控制中存在的平台异构性与通信差异问题. 为此, 文献[14]通过马尔科夫决策过程对海空跨域追踪问题进行建模, 并采用深度Q学习设计无人机–水面艇–潜器协同追踪控制器. 文献[15]采用强化学习(reinforcement learn-ing, RL)设计异构无人平台容错控制器, 以应对通信链路故障. 然而, 基于学习算法的控制器需要人为预设奖励/代价函数, 导致生成的控制策略难以应对动态复杂水下环境. 为此, 文献[16−18]利用逆强化学习(inverse reinforcement learning, IRL)从专家演示中获取代价函数, 根据环境变化给出对应的控制策略. 然而, 上述逆强化学习方法没有考虑跨域无人平台的协同控制, 且由于代价函数二次型约束而没有引入避障项. 为此, 如何结合动态避障设计逆强化学习编队控制器, 使跨域无人平台在保持队形稳定的基础上实现海上目标安全协同追踪仍是未解决的问题.
本文提出一种基于空–海–潜跨域无人平台协同的海上目标探测追踪策略, 在保证海上移动目标探测概率最大的情况下, 实现跨域无人平台编队安全协同追踪. 主要创新点如下: 1)针对海上目标的动态特性以及无人平台自身约束, 采用测度理论解析无人机–水面艇–潜器最佳探测编队队形. 与文献[7−9]相比, 提高了海上目标探测概率; 同时, 与文献[10]相比, 本文探测模式考虑海上目标动态特性以及无人平台自身约束, 具有更好的探测性能. 2)设计基于逆强化学习的无人机–水面艇–潜器协同追踪控制器. 与文献[14]相比, 无人平台可以从专家演示中获取代价函数, 不需要人为预设; 同时, 与文献[16−18]相比, 所提方法可在保持队形稳定的基础上实现动态避障, 具有更好的环境适应性.
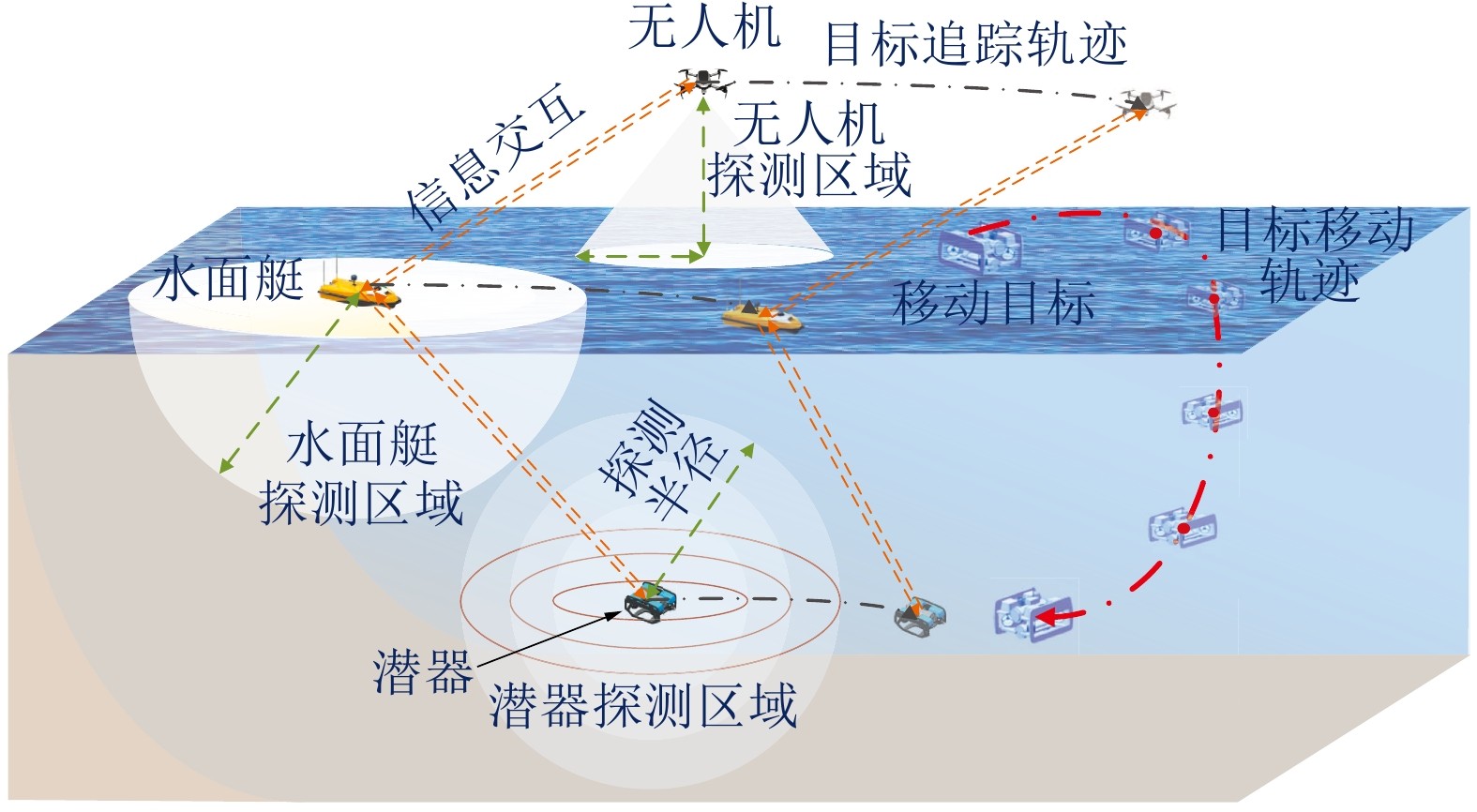
图1 无人机–水面艇–潜器协同探测追踪
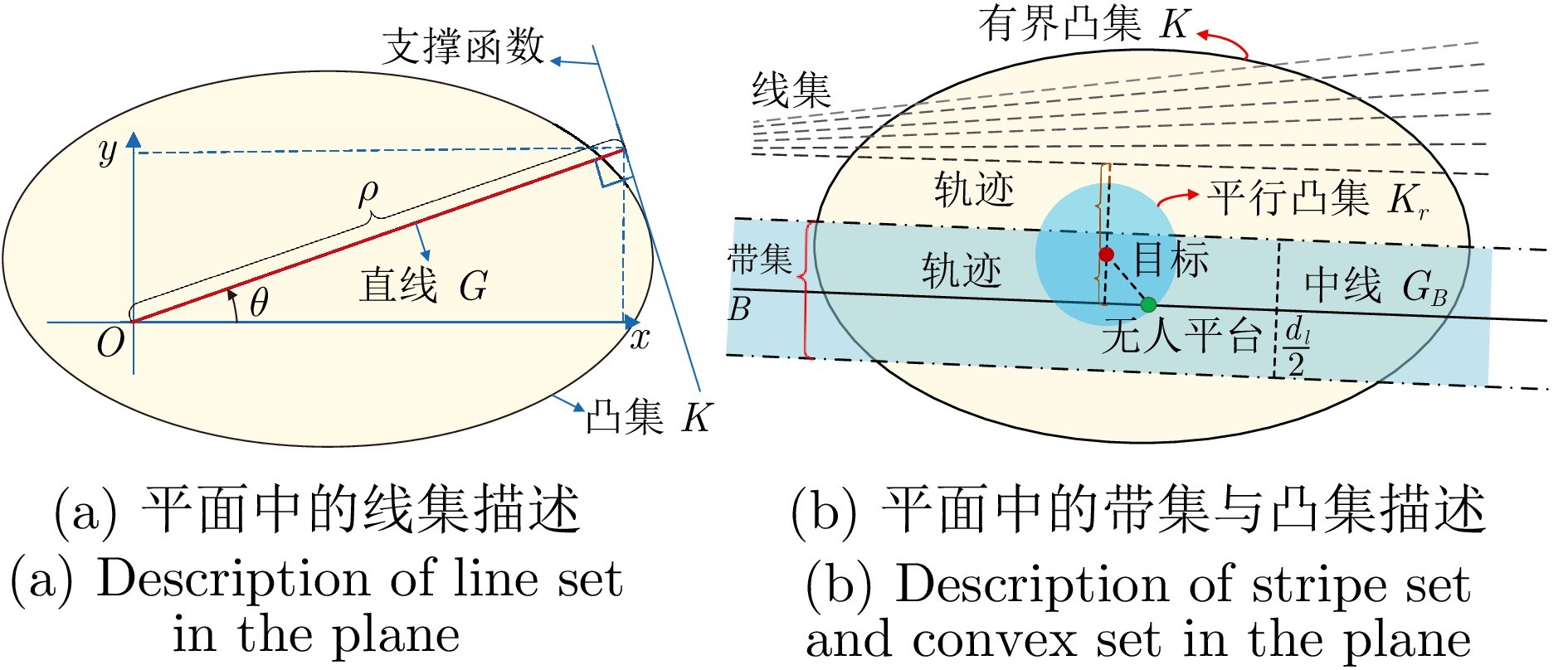
图2 线集、带集与凸集的描述
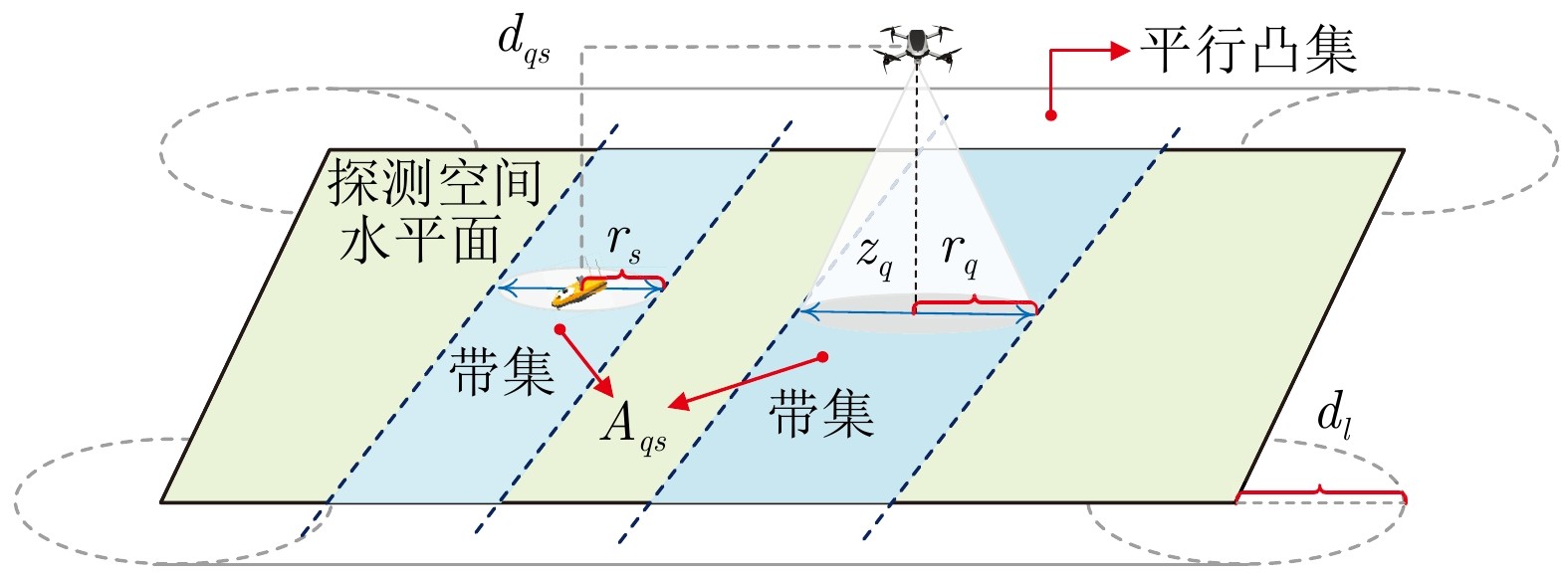
图3 无人机–水面艇目标探测模式
本文提出一种基于空–海–潜跨域无人平台协同的海上目标探测追踪策略. 针对海上目标的高机动性以及无人平台自身约束, 采用测度理论解析无人机–水面艇–潜器最佳探测编队队形, 实现目标探测概率最大化; 进一步, 设计基于逆强化学习的无人机–水面艇–潜器编队控制器, 实现障碍物环境下水面/水下目标的可靠有效追踪. 最后, 通过仿真与实验验证了所提方法的有效性. 结果表明, 所提探测模式可在有限时间内使移动目标探测概率最大化的同时, 实现复杂环境下跨域无人平台安全协同追踪.
未来将聚焦深海极端环境下跨域平台的自主感知与协同控制问题, 并探索针对深海低速、弱通信特点的智能追踪与避障策略.
作者简介
田泽兴
燕山大学电气工程学院博士研究生. 2018年获得郑州大学自动化专业学士学位. 主要研究方向为刚性拓扑优化, 水下编队控制. E-mail: zxtian@stumail.ysu.edu.cn
闫敬
燕山大学电气工程学院教授. 2014年获得燕山大学控制科学与工程专业博士学位. 主要研究方向为水声传感器网络, 水下机器人控制. 本文通信作者. E-mail: jyan@ysu.edu.cn
高麒媛
燕山大学电气工程学院硕士研究生. 2023年获得燕山大学自动化专业学士学位. 主要研究方向为海空跨域平台目标追踪控制. E-mail: gaoqiyuan@stumail.ysu.edu.cn
杨晛
燕山大学电气工程学院教授. 2016年获得燕山大学控制科学与工程专业博士学位. 主要研究方向为网络化遥操作系统, 水下网络物理系统和非线性控制. E-mail: xyang@ysu.edu.cn
关新平
上海交通大学自动化与感知学院教授. 1999年获得哈尔滨工业大学控制科学与工程专业博士学位. 主要研究方向为工业信息物理系统, 无线组网及应用, 水下传感器网络. E-mail: xpguan@sjtu.edu.cn
https://blog.sciencenet.cn/blog-3291369-1528003.html
上一篇:多障碍场景下基于多策略进化机制的无人机三维路径规划
下一篇:《自动化学报》2026年52卷3期目录分享
