博文
智能机器人类脑情景认知方法研究现状与展望
|
引用本文
于乃功, 闫金涵, 王宗侠, 张志雯, 刘建军. 智能机器人类脑情景认知方法研究现状与展望. 自动化学报, 2025, 51(12): 2588−2608 doi: 10.16383/j.aas.c240716
Yu Nai-Gong, Yan Jin-Han, Wang Zong-Xia, Zhang Zhi-Wen, Liu Jian-Jun. Research status and prospects of brain-inspired situational cognition methods for intelligent robots. Acta Automatica Sinica, 2025, 51(12): 2588−2608 doi: 10.16383/j.aas.c240716
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240716
关键词
智能机器人,类脑情景认知方法,海马结构,生物视觉,认知地图
摘要
机器人的理想境界是拥有类脑智能并像人和动物一样具有智能行为. 随着对机器人感知、认知能力要求的不断提高, 传统人工智能方法逐渐陷入瓶颈. 自然界中的哺乳动物拥有卓越的情景认知能力, 借鉴其大脑的神经信息传递和处理机制, 研究机器人类脑情景认知方法已成为热点. 首先介绍大鼠、猕猴等哺乳动物的情景认知神经机理, 进而探讨受其启发的情景认知计算模型, 随后概述机器人类脑情景认知方法研究, 最后总结当前研究面临的挑战并展望未来发展方向.
文章导读
随着人工智能和机器人产业的蓬勃发展, 智能机器人已在物流配送、家庭服务、安全巡检等场景中得到广泛应用并发挥重要作用. 与此同时, 公众对其智能化水平提出更高的要求, 期望其成为人类生产生活中的智慧伙伴[1]. 但是与人和动物大脑相比, 当前机器人在感知、认知等关键能力上仍存在较大差距. 为突破这一瓶颈, 越来越多的研究者将目光投向大鼠、猕猴等哺乳动物的大脑结构与工作机制, 尝试根据其中的原理来设计类脑智能机器人系统[2]. 哺乳动物虽不具备机器人系统中常用的高精度传感器, 却能在复杂环境中灵活应对各种挑战, 完成躲避天敌、觅食、归巢等任务. 这种能力得益于其对多源感知信息的高效整合以及卓越的情景认知(Situational cognition)能力[3]. 值得注意的是, 哺乳动物大脑在执行这些复杂任务的同时, 表现出极低的能耗和较高的计算效率. 因此, 机器人研究者日益重视从神经科学中汲取灵感, 试图构建具备类脑感知与认知能力的智能机器人系统, 以实现更高水平的智能行为[4].
情景认知是哺乳动物大脑的一项核心能力, 体现个体在特定时空环境中对事件和信息进行感知、理解、组织和利用的能力. 广义而言, “认知”可被视为基于内部表征所进行的一系列信息计算过程, 涵盖知觉、学习与记忆、推理等子功能[5]. 这一系统能力使动物能够在复杂动态环境中做出适应性反应. 哺乳动物通过整合来自视觉、听觉、触觉、前庭觉等感知通路的信息, 对当前环境形成稳定的情景感知. 感知后的信息经过内嗅皮层(Entorhinal cortex, EC)整合后传入海马体(Hippocampus, HP), 进而形成认知地图(Cognitive map)[6]. 认知地图是情景认知的核心成果之一, 它不仅记录不同地点的位置关系与空间拓扑, 还整合与特定地点相关联的物体、奖励信号甚至行为规则等相关要素[7]. 海马体在时间和空间两个维度上对情景信息进行编码, 是大脑神经记忆系统的核心, 所构建的认知地图实质上就是一种情景记忆, 其形成过程即为典型的情景认知过程[8].
对于智能机器人而言, 实现情景认知是其迈向高度自主化和智能化面临的核心挑战. 当前, 由传统人工智能系统驱动的机器人在情景认知的泛化能力、能效、自适应性和鲁棒性等方面, 还远远达不到人和动物的水平. 为突破这一瓶颈, 借鉴大鼠、猕猴等哺乳动物大脑的认知机制, 发展面向复杂环境的类脑情景认知方法, 已成为机器人领域的研究热点. 国家层面也高度重视类脑智能技术的发展: 国务院印发的 《新一代人工智能发展规划》 指出, 受脑科学研究成果启发的类脑智能蓄势待发, 希望到2030年在类脑智能领域取得重大突破, 占据人工智能科技制高点; 工业和信息化部等十五部门联合发布的 《“十四五”机器人产业发展规划》 同样指出, 要针对机器人仿生感知与认知前沿技术开展攻关行动.
类脑情景认知方法是机器人学、人工智能、脑科学等多学科交叉融合的产物, 其特点在于借鉴哺乳动物大脑情景认知的神经机制, 包括信息编码与处理机制、学习与记忆机制等. 通过构建类脑计算模型, 处理视觉、听觉、触觉、前庭觉等多模态感知信息, 实现外部世界的内在表征, 进而形成情景认知地图. 赋予机器人理解和适应复杂动态环境的能力, 为其在非结构化环境下实现自主探索与目标导航奠定基础. 目前已有许多学者围绕“类脑导航”进行综述, 提出不同的概念定义和研究框架[9−12]. 相比之下, 本文综述的“类脑情景认知”有所不同, 其重点聚焦于感知和理解环境以及认知地图的构建, 而较少涉及面向目标的导航行为. 与传统的环境感知和地图构建方法相比, 类脑情景认知方法通过模拟哺乳动物大脑的神经处理机制, 能够在感知信息受限或存在噪声干扰的情况下生成稳定的内部表征. 这种从物理空间向神经空间的映射机制, 使系统具备对环境信息的压缩编码、噪声抑制和泛化识别能力. 在认知地图构建过程中, 该机制展现出较强的灵活性与鲁棒性. 同时, 该方法不依赖高精度传感器或高精地图, 具有较低的功耗和良好的自适应性, 便于在资源受限的移动机器人平台上实现. 类脑情景认知研究不仅有助于深入理解动物的高级认知功能、拓展研究视角、实现源头上的创新, 还为提升机器人在动态、非结构化环境中的空间认知与导航能力开辟了新的发展路径, 并在自动驾驶、无人探测等领域展现出广阔的应用前景与潜在价值.
本文围绕智能机器人类脑情景认知方法的研究进展, 结构安排如下: 第1节介绍哺乳动物的情景认知机理, 包括信息感知和认知的神经通路及相关时空细胞; 第2节探讨基于情景认知机理的计算模型研究, 涵盖生物视觉及多种空间细胞的计算模型; 第3节在此基础上概述机器人类脑情景认知方法的研究进展, 聚焦于认知地图构建和情景位置识别等具体任务; 第4节分析当前研究面临的挑战并展望未来发展方向; 最后对全文进行总结.
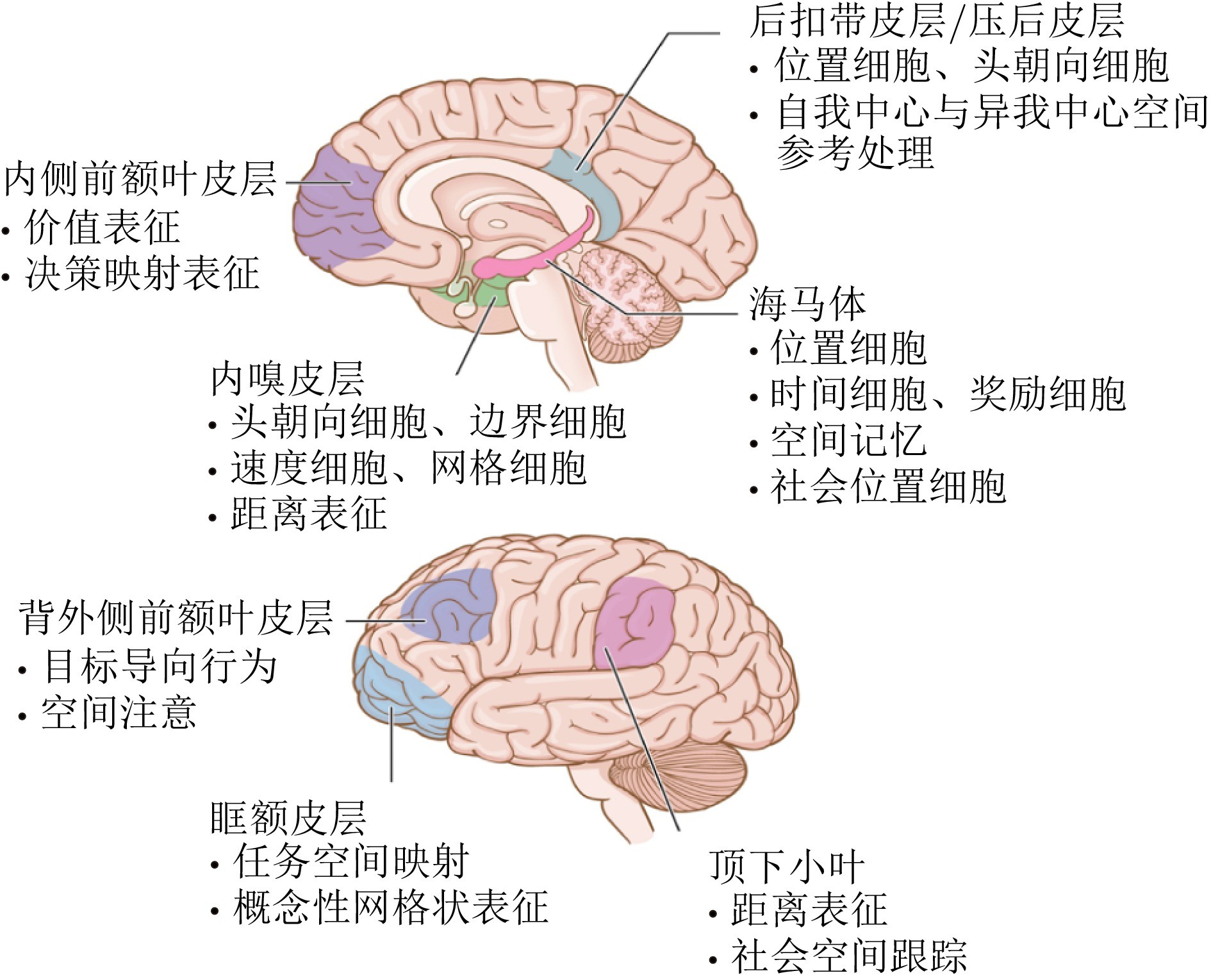
图1 情景认知相关脑区
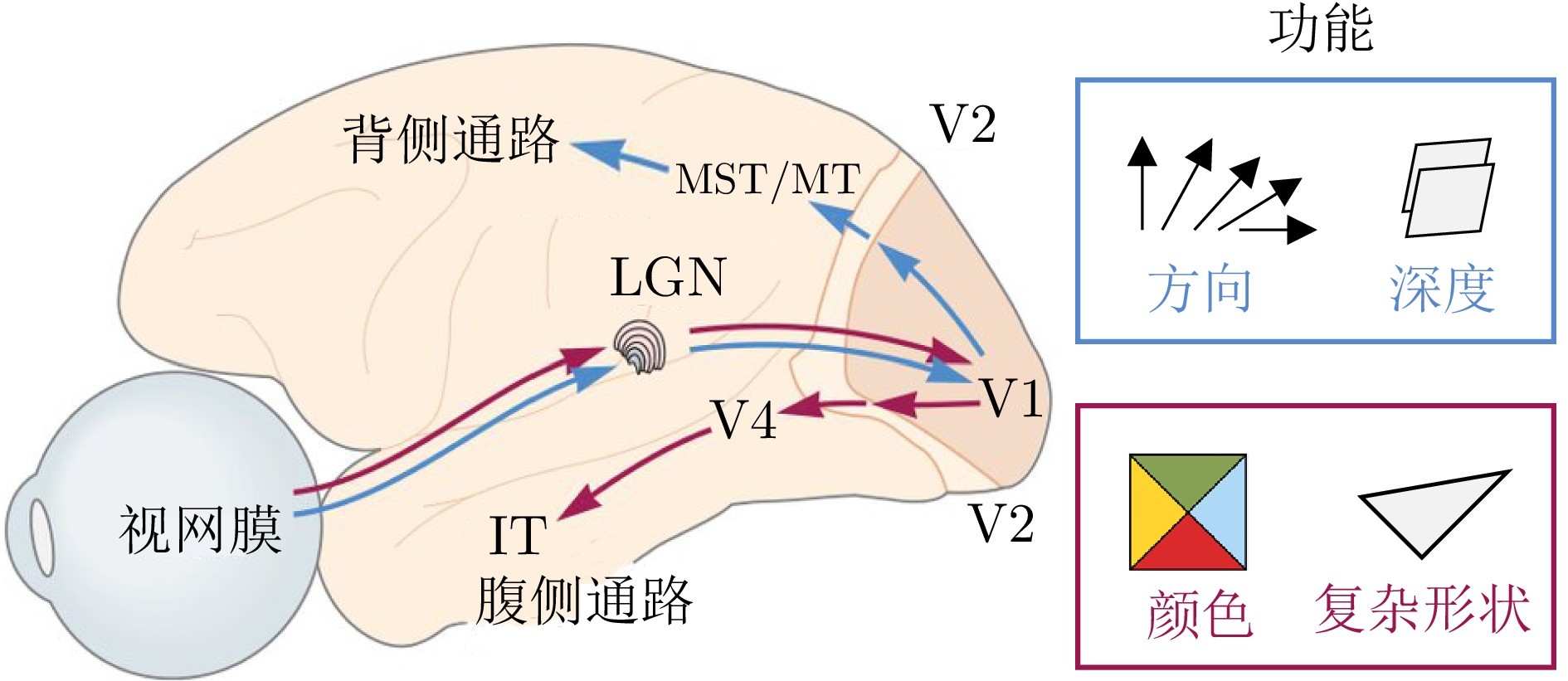
图2 视觉信息传递通路示意图
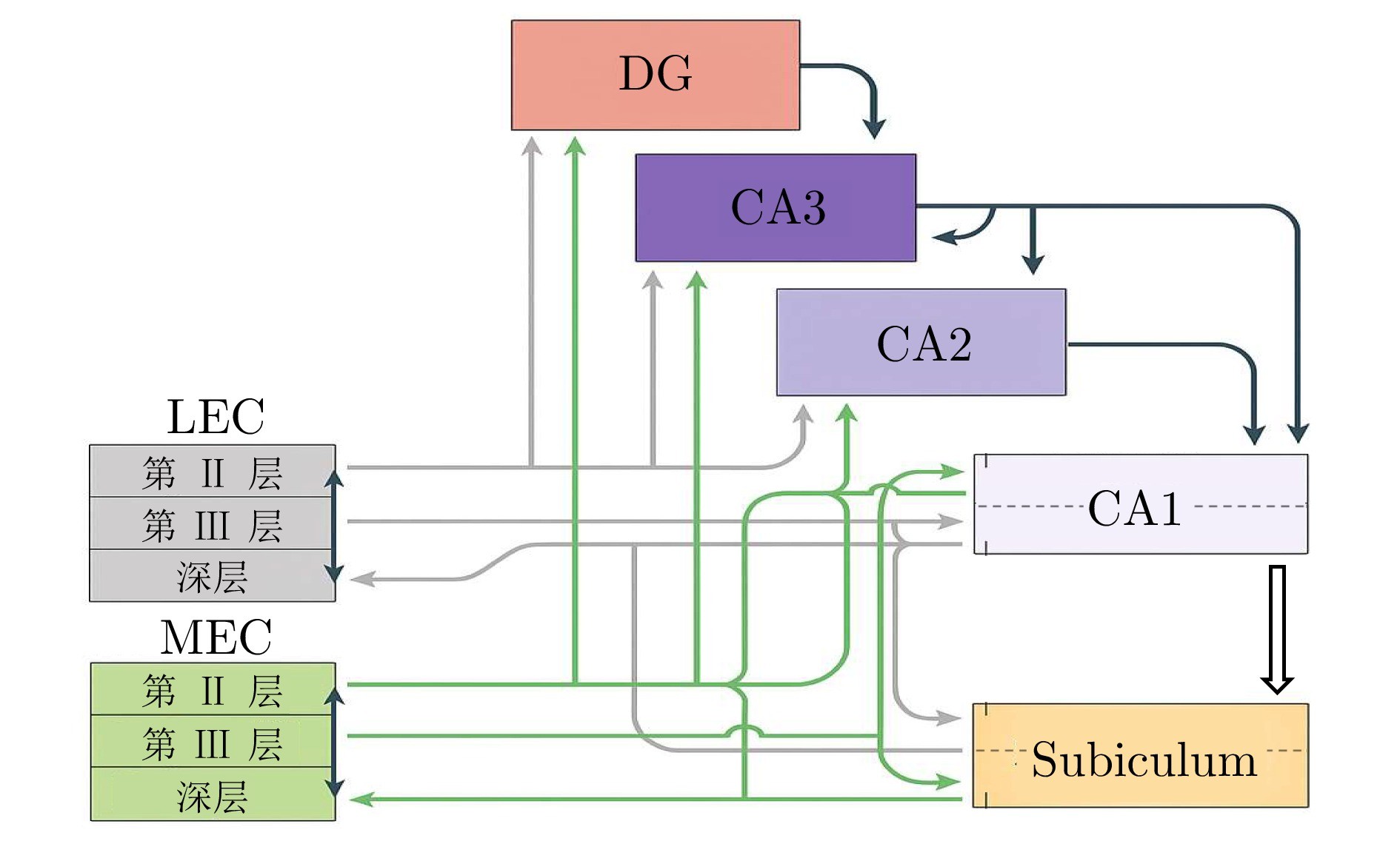
图3 内嗅−海马信息传递通路示意图
本文针对智能机器人类脑情景认知研究, 介绍了大鼠等哺乳动物实现情景认知的神经机理, 归纳了与情景认知相关的计算模型, 围绕智能机器人认知地图构建和情景位置识别两类具体应用任务, 梳理了相关研究发展脉络, 分析了当前研究存在的不足之处并提出未来发展方向, 希望推动智能机器人类脑情景认知研究的发展.
作者简介
于乃功
北京工业大学信息科学技术学院教授. 主要研究方向为计算智能与智能系统, 机器人学与机器人技术, 机器视觉. 本文通信作者. E-mail: yunaigong@bjut.edu.cn
闫金涵
北京工业大学信息科学技术学院博士研究生. 主要研究方向为智能机器人和类脑智能. E-mail: yjhcrossover@163.com
王宗侠
北京工业大学计算机学院高级实验师. 主要研究方向为类脑计算和嵌入式系统. E-mail: wzongxia@bjut.edu.cn
张志雯
北京工业大学信息科学技术学院博士研究生. 主要研究方向为计算智能与类脑计算. E-mail: zhang476342187@163.com
刘建军
北京工业大学信息科学技术学院博士研究生. 主要研究方向为智能机器人和机器视觉. E-mail: liujianjun@emails.bjut.edu.cn
https://blog.sciencenet.cn/blog-3291369-1517795.html
上一篇:《自动化学报》2025年51卷12期目录分享
下一篇:基于部分状态反馈的燃料电池系统协同滑模控制
