博文
切换拓扑下混合相对阶异构多智能体系统自适应扰动抑制设计
|
引用本文
文利燕, 刘宇, 姜斌, 马亚杰, 崔玉康. 切换拓扑下混合相对阶异构多智能体系统自适应扰动抑制设计. 自动化学报, 2026, 52(1): 121−136 doi: 10.16383/j.aas.c250180
Wen Li-Yan, Liu Yu, Jiang Bin, Ma Ya-Jie, Cui Yu-Kang. Adaptive disturbance rejection for mixed relative degree heterogeneous multi-agent systems with switching topology. Acta Automatica Sinica, 2026, 52(1): 121−136 doi: 10.16383/j.aas.c250180
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250180
关键词
异构多智能体系统,输出一致性,自适应控制,切换拓扑,扰动抑制,混合相对阶
摘要
针对不确定扰动下具有混合相对阶的异构多智能体系统, 提出一种新的分布式自适应扰动抑制控制方法, 实现切换拓扑下领导者−跟随者输出一致性. 首先, 通过引入局部输出跟踪误差, 将领导者−跟随者全局输出一致性问题转化为相邻智能体局部输出一致性问题; 然后, 针对系统参数和扰动已知的情况, 基于智能体系统控制−扰动相对阶匹配条件, 提出一种基于高阶微分邻居信息的分布式标称扰动抑制控制器. 基于此, 针对因混合相对阶差异而导致控制器中的高阶微分邻居信号难以直接获取的问题, 提出基于高阶滑模微分器的精确估计方法, 突破了传统控制设计对系统相对阶一致性的依赖, 解决了固定/切换拓扑下局部−全局输出一致性; 进而, 针对系统参数和扰动不确定的情况, 进行分布式自适应扰动抑制控制器设计, 实现切换拓扑下的领导者−跟随者输出一致性以及期望的扰动补偿. 所设计的控制方法不仅能够在不依赖全局智能体信息及领导者信息的前提下, 确保整个智能体系统的闭环稳定性、实现跟随者对领导者的输出跟踪, 而且能达到期望的扰动抑制效果. 与常规的自适应一致性控制方案相比, 还具备处理具有混合相对阶特性的异构多智能体系统的能力. 最后, 仿真研究验证了所设计控制方案的有效性.
文章导读
近年来, 多智能体系统协同控制在多个领域取得显著进展, 包括机器人编队、智能电网分布式调度以及无人机−无人车系统协同侦察等, 其重要性日益凸显[1−8]. 相较于同构多智能体系统, 为应对日益复杂和多样化的任务需求, 异构多智能体系统通常由不同类型、具备不同功能的智能体组成. 这些智能体配备不同的传感器、执行器以及计算单元, 导致各个智能体可能具有不同的动力学模型、系统参数、状态维数, 甚至动态特性结构也存在差异, 例如系统控制相对阶结构的不同[9−10]. 如果无法针对这些异构特性设计有效的多智能体系统协同控制方案, 不仅会影响单个智能体的系统性能, 甚至可能导致群体系统的一致性失效. 因此, 如何增强多智能体系统处理异构特性的能力, 设计有效的协同控制方法, 成为当前研究的重点和难点.
考虑智能体之间的通信距离存在限制, 多智能体系统执行任务时可能由于队形改变、动态任务分配、控制策略改变以及拓扑重构等因素, 导致智能体间的通信连接发生变化[32−33]. 此时, 多智能体系统通信网络的拓扑结构将发生改变. 目前, 通常将这种通信拓扑结构的变化视作切换拓扑, 进而进行分布式控制器设计. 文献[34]针对切换通信拓扑的同构多智能体系统, 研究其在任意切换拓扑下的多智能体系统的一致性问题. 文献[35]针对切换拓扑下异构多智能体系统的双向事件触发一致性问题, 提出一种基于时变耦合权重和动态事件触发机制的双向补偿器, 进而设计分布式控制器, 实现多智能体系统双向事件触发的一致性. 文献[36]针对时变通信拓扑下未知系统动态的多智能体系统, 提出一种基于数据驱动的模型预测控制, 实现多智能体系统的一致性. 此外, 复杂场景下的异构多智能体系统在执行任务时, 每个智能体由于自身以及外部环境的变化, 其系统参数往往存在不确定性, 并且复杂环境往往伴随着不确定外部扰动, 将对每个智能体系统的控制性能和稳定性造成影响, 进而通过通信网络将这种影响扩大至整个多智能体系统, 造成全局系统的一致性性能下降[37].
自适应控制作为一种能够自动调整控制器参数以有效应对不确定系统参数和扰动的控制方法得到广泛的研究[38−42], 并在多智能体系统一致性控制问题中取得一些研究成果. 文献[43]针对具有参数不确定的异构多智能体系统, 提出仅依赖邻居信息的分布式输出反馈MRAC方案, 实现异构多智能体系统的输出一致性. 文献[44]针对异构不确定多智能体系统, 在通信拓扑网络时变条件下, 提出一种基于多智能体匹配条件的输出反馈MRAC扩展方案, 有效实现了系统的同步控制. 文献[45]考虑通信拓扑为切换拓扑的情况, 针对系统参数和扰动均不确定的多智能体系统, 设计分布式状态反馈MRAC方案, 实现多智能体输出一致性. 文献[46]针对通信拓扑突变的不确定异构多智能体系统, 提出一种基于领导者−模型−跟随者匹配的分布式自适应协同控制方法, 实现领导者−跟随者输出一致性. 但是, 上述自适应控制方法往往要求多智能体系统具有相同的动态特性结构, 例如相同的相对阶结构, 且对领导者/参考模型信息具有较强的依赖性, 这使得其难以处理具备更复杂异构特性的多智能体系统的协同控制问题. 此外, 文献[9]针对混合相对阶的多智能体系统, 通过为每个跟随者设计领导者输出观测器, 进而构造相同相对阶的参考模型, 以降低控制复杂度.
与现有成果不同, 本文针对具有混合相对阶的不确定异构多智能体系统, 设计一种新的基于邻居共享信号的分布式自适应控制策略, 使得多智能体系统因通信距离限制而导致通信拓扑切换时实现全局系统输出一致性, 以提高系统应对复杂异构特性及复杂任务场景的能力. 本文主要贡献如下:
1)针对固定与切换拓扑下的异构多智能体系统, 考虑系统参数及外部扰动已知的情况, 基于控制−扰动相对阶条件, 提出一种基于高阶微分邻居共享信息的分布式模型参考扰动抑制架构, 其通过直接跟踪局部输出实现协同控制, 而无需依赖参考模型, 显著简化了控制器设计复杂度.
2)针对异构多智能体系统中因混合相对阶差异而导致的高阶微分邻居共享信号难以直接获取的问题, 提出基于高阶微分器的精确估计方法, 突破传统控制设计对系统相对阶一致性的依赖, 解决了固定/切换拓扑下局部−全局输出一致性的关键难题.
3)针对切换拓扑下具有混合相对阶的异构多智能体系统, 在领导者−跟随者智能体参数与扰动均未知的条件下, 提出一种基于指示函数与高阶微分估计器融合的分布式模型参考自适应控制方法, 通过融合指示函数的拓扑适应性与高阶微分器的动态估计能力, 实现了系统的全局输出一致性.
本文结构安排如下: 第1节给出多智能体领导者−跟随者系统模型以及本文的控制问题; 第2节考虑系统和扰动参数已知的情况, 给出标称的分布式控制器设计(从固定拓扑情形推广到切换拓扑情形); 第3节考虑系统和扰动参数不确定的情况, 给出切换拓扑下的自适应分布式控制器设计; 第4节进行仿真研究; 第5节给出本文结论并展望通信受限下复杂不确定环境的后续研究方向.
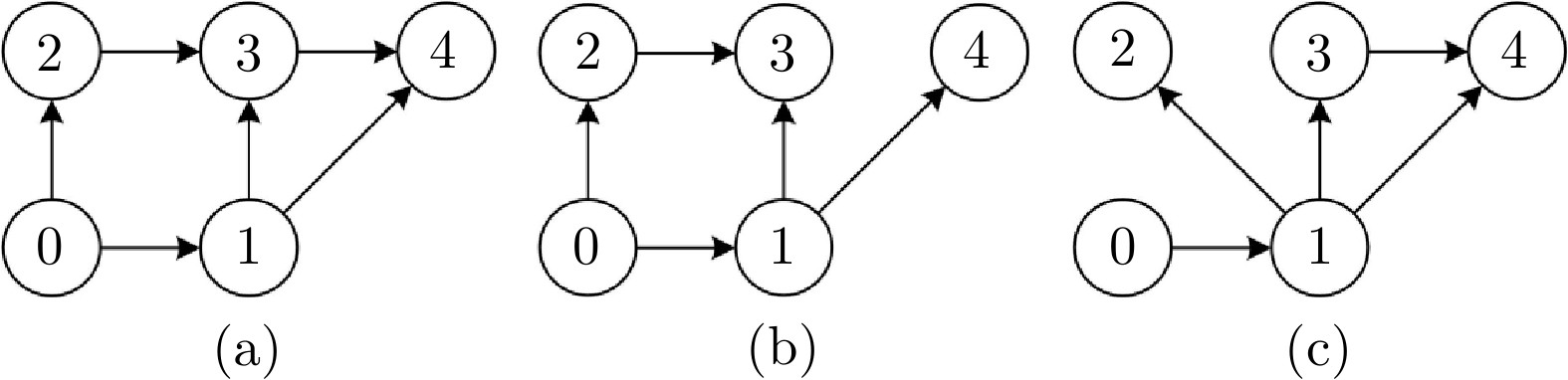
图1 通信拓扑结构示意图
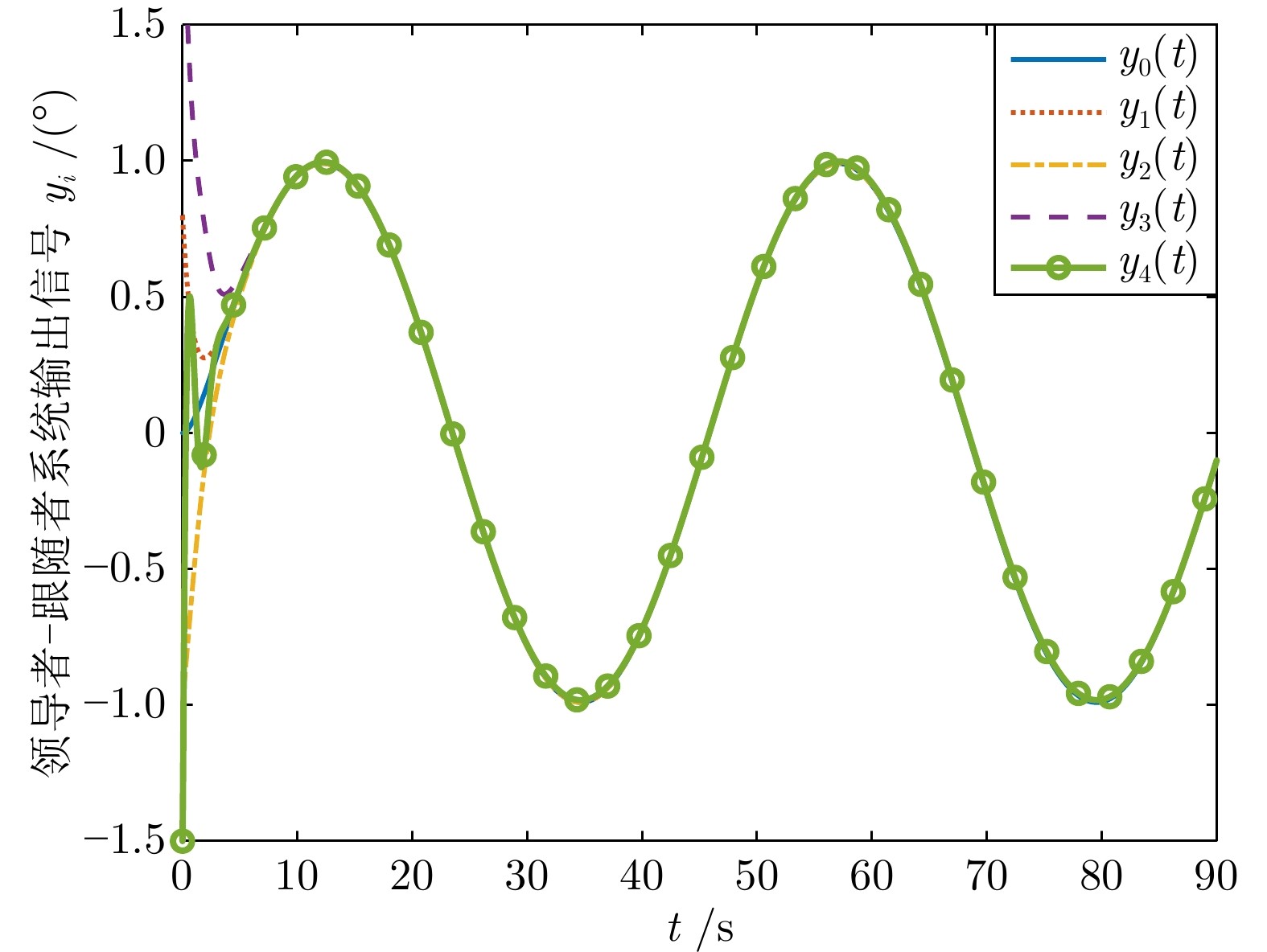
图2 领导者−跟随者系统输出信号
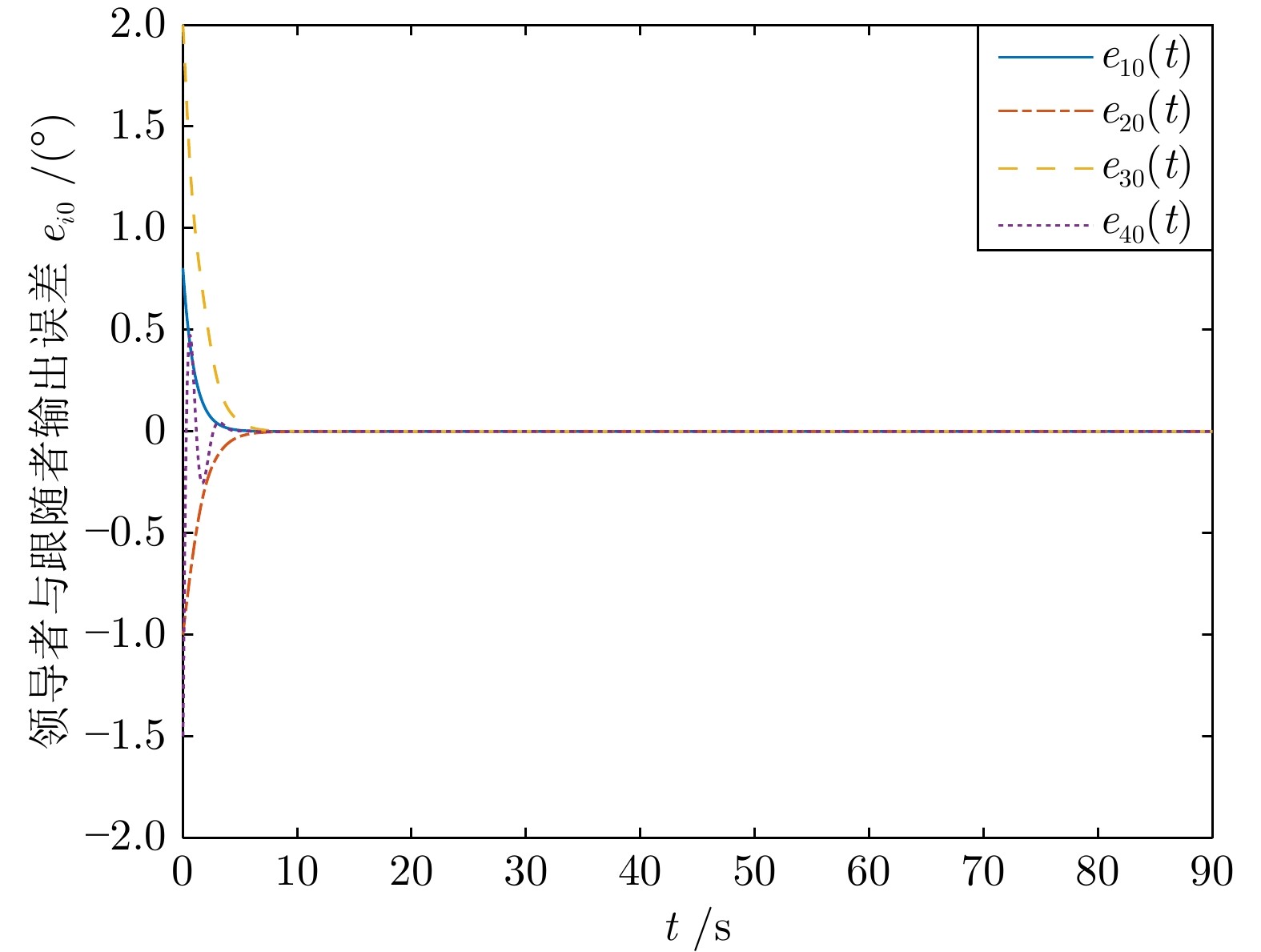
图5 领导者与跟随者系统的输出跟踪误差
本文充分考虑各智能体通信距离存在限制的情况, 研究多智能体系统中领导者和所有跟随者信息无法全局共享以及通信网络拓扑为切换拓扑下的领导者−跟随者全局输出一致性问题. 为此, 针对不确定扰动下混合相对阶的不确定异构多智能体系统, 提出一种新的基于高阶邻居信息的分布式自适应扰动抑制方案, 实现了切换拓扑下领导者−跟随者输出一致性. 针对系统参数及外部扰动已知的情况, 提出一种基于高阶微分邻居信息的分布式模型参考扰动抑制架构, 其可以通过直接跟踪局部输出实现协同控制, 而无需依赖参考模型, 显著简化了控制器设计复杂度. 基于此, 提出基于高阶滑模微分器的精确估计方法, 解决了混合相对阶差异而导致控制器中的高阶微分邻居信号难以直接获取的问题; 进而针对系统参数和扰动未知的情况, 进行分布式自适应扰动抑制控制器设计, 实现了切换拓扑下的领导者−跟随者输出一致性. 在不依赖全局跟随者及领导者信息的前提下, 所设计的方法不仅能确保智能体系统的闭环稳定性、实现跟随者对领导者的输出跟踪, 并达到期望的扰动抑制效果, 还具备处理具有混合相对阶特性的异构多智能体系统的能力. 最后, 通过仿真实验验证了本文所提方法的有效性. 目前, 针对复杂不确定环境下多智能体系统因通信故障而导致任务无法完成的问题仍有待进一步研究, 这将是我们未来的主要研究工作之一.
作者简介
文利燕
南京航空航天大学自动化学院副教授. 主要研究方向为自适应控制, 故障诊断, 容错控制. E-mail: wenliyan_2017@nuaa.edu.cn
刘宇
南京航空航天大学自动化学院硕士研究生. 主要研究方向为自适应控制及应用. E-mail: liuyu232130@nuaa.edu.cn
姜斌
南京航空航天大学自动化学院教授. 主要研究方向为故障诊断与容错控制及应用. 本文通信作者.E-mail: binjiang@nuaa.edu.cn
马亚杰
南京航空航天大学自动化学院教授. 主要研究方向为故障诊断与容错控制及应用. E-mail: yajiema@nuaa.edu.cn
崔玉康
南京航空航天大学自动化学院硕士研究生. 主要研究方向为自适应控制及应用. E-mail: kangkang@nuaa.edu.cn
https://blog.sciencenet.cn/blog-3291369-1522341.html
上一篇:通信受限的双网络零和博弈分布式在线优化
下一篇:露天矿机器人化采运理论技术框架
