博文
露天矿机器人化采运理论技术框架
|
引用本文
葛世荣, 杨健健, 黄乾坤, 宋瑞琦, 陈龙, 陈鹏, 杨胜利, 何适, 丁震, 王飞跃. 露天矿机器人化采运理论技术框架. 自动化学报, 2026, 52(1): 148−171 doi: 10.16383/j.aas.c250097
Ge Shi-Rong, Yang Jian-Jian, Huang Qian-Kun, Song Rui-Qi, Chen Long, Chen Peng, Yang Sheng-Li, He Shi, Ding Zhen, Wang Fei-Yue. A theoretical and technical framework for roboticized mining and hauling in open-pit mines. Acta Automatica Sinica, 2026, 52(1): 148−171 doi: 10.16383/j.aas.c250097
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250097
关键词
机器人化采运,端边感知,平行控制,自主运输,高效协同,群智调度,工程应用
摘要
露天矿机器人化开采面临复杂环境数据不足、极端工况测试难、现场试验风险高、动态感知建模复杂及实验周期长等挑战. 为此, 提出基于“端边感知、平行控制”的露天矿机器人化采运智慧生产模式, 从车辆感控、车铲协同、集群调度与工程示范等多层面入手, 系统地突破提效开采机理、高精度全域感知、稳定协同控制与可靠群体管控等核心科学问题. 通过技术集成与工艺优化, 实现百吨级以上无人驾驶运输车的规模化运行, 形成我国露天煤矿高水平智能化的“双十” (10项创新技术、10项标准)、“双百” (100台车示范, 运输效率达有人系统110%)、“双千” (千台车监控平台、千小时无故障运行)中国方案, 有力支撑了我国矿山智能化绿色开采发展战略.
文章导读
矿业是全球经济的基石之一, 为工业发展提供基础材料, 是全球能源结构中不可或缺的组成部分[1], 并对全球经济增长起到重要推动作用. 然而, 该行业长期以来面临多重挑战, 包括恶劣的作业环境、频发的矿难, 以及采矿活动对自然环境的破坏[2]. 与此同时, 随着全球能源需求的持续增长, 提升矿产资源开采的效率和产量变得尤为迫切. 因此, 推动采矿作业的机器人化, 实现矿业的智能化与现代化转型至关重要. 这不仅有助于提高开采效率和生产力, 还能显著提升作业安全性, 并尽可能减少采矿活动对自然环境的不利影响. Yang等[3]在工业5.0的背景下提出智能化矿山建设应以设备智能、数据智能、算法智能和生产智能 (4I)为中心, 围绕采矿设备自主化、生产数据可视化、开采过程透明化、采掘现场无人化及矿山环境生态化 (5O), 实现物理矿山安全 (safety)、数字空间安全 (security)、矿山生态可持续 (sustainability)、矿工权益得到保护 (sensitivity)、服务于人 (service)和智慧 (smartness)的6S发展目标. 4I-5O-6S矿山5.0内涵如图1所示[3].
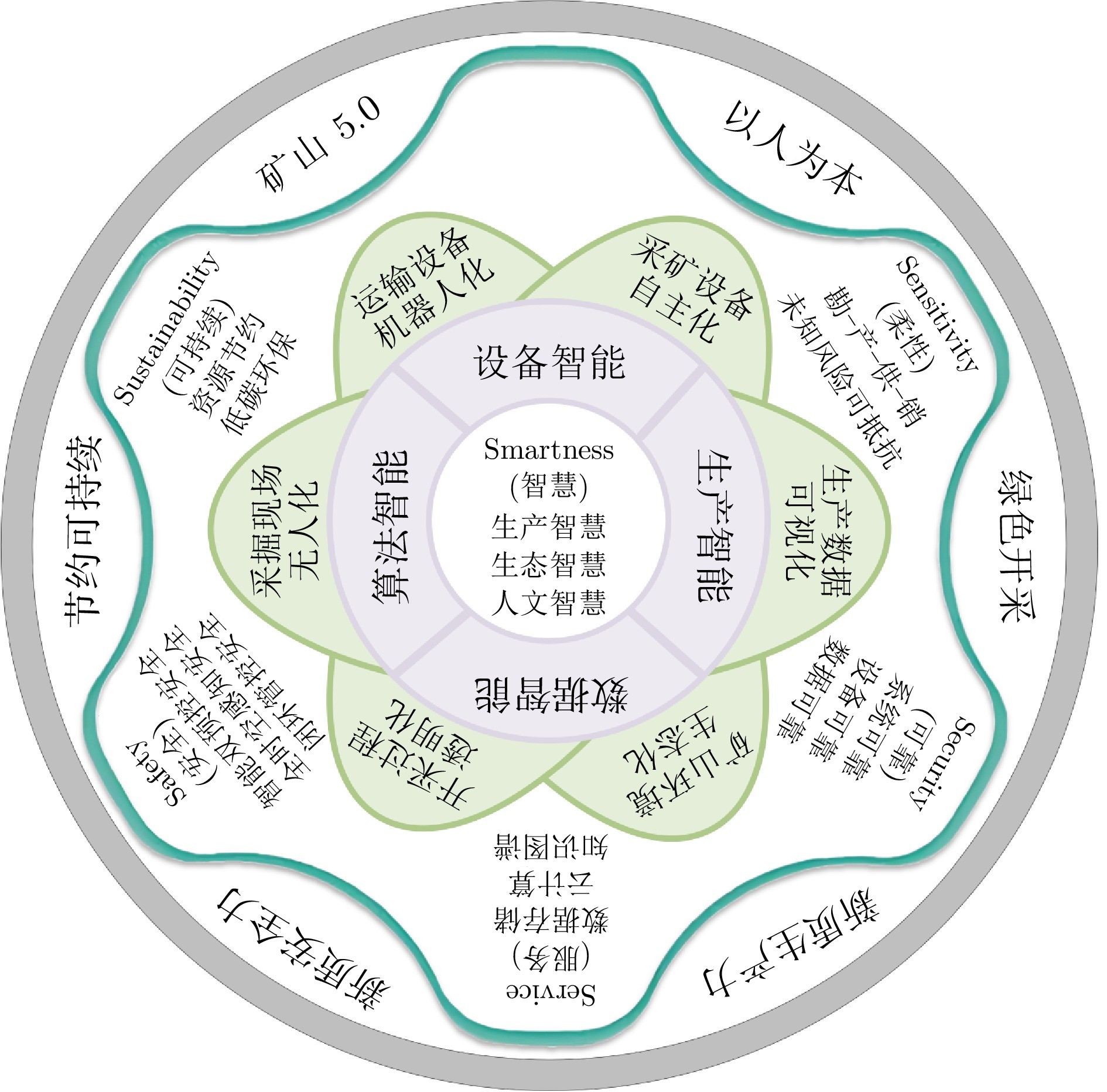
图1 矿山5.0的4I-5O-6S体系
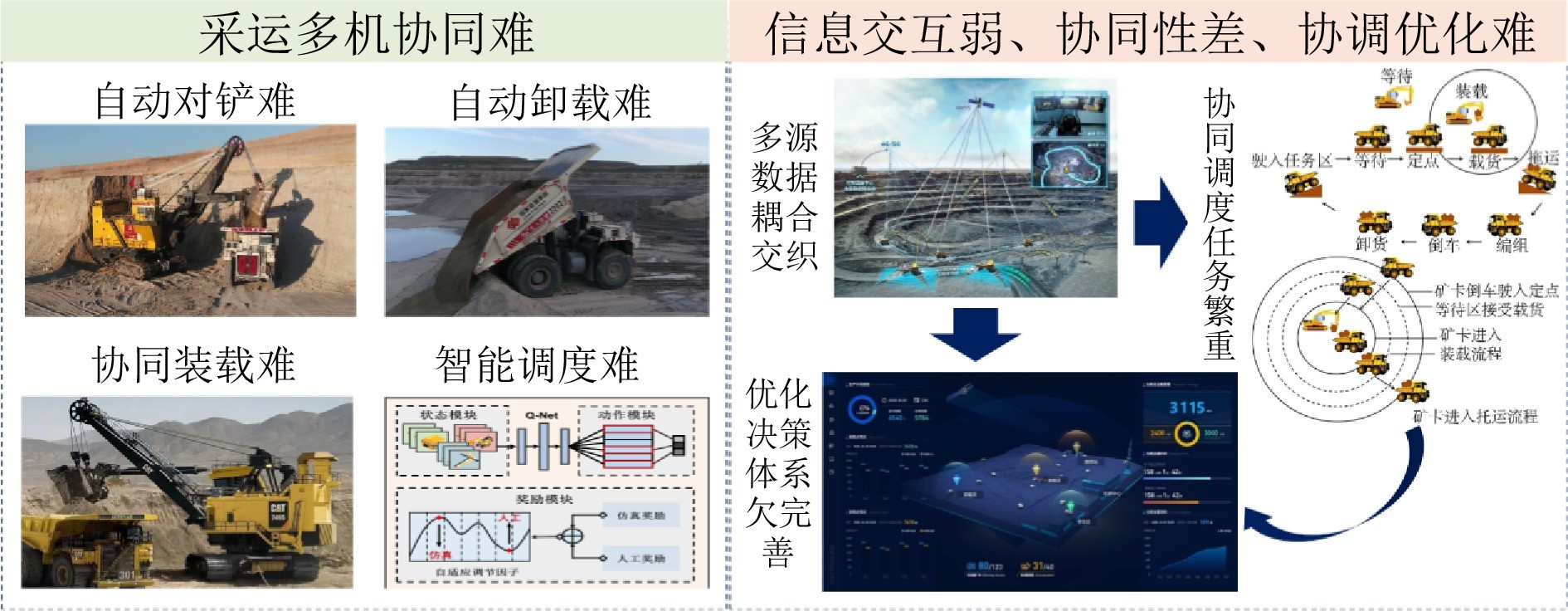
图2 机器人化采运面临的主要难点
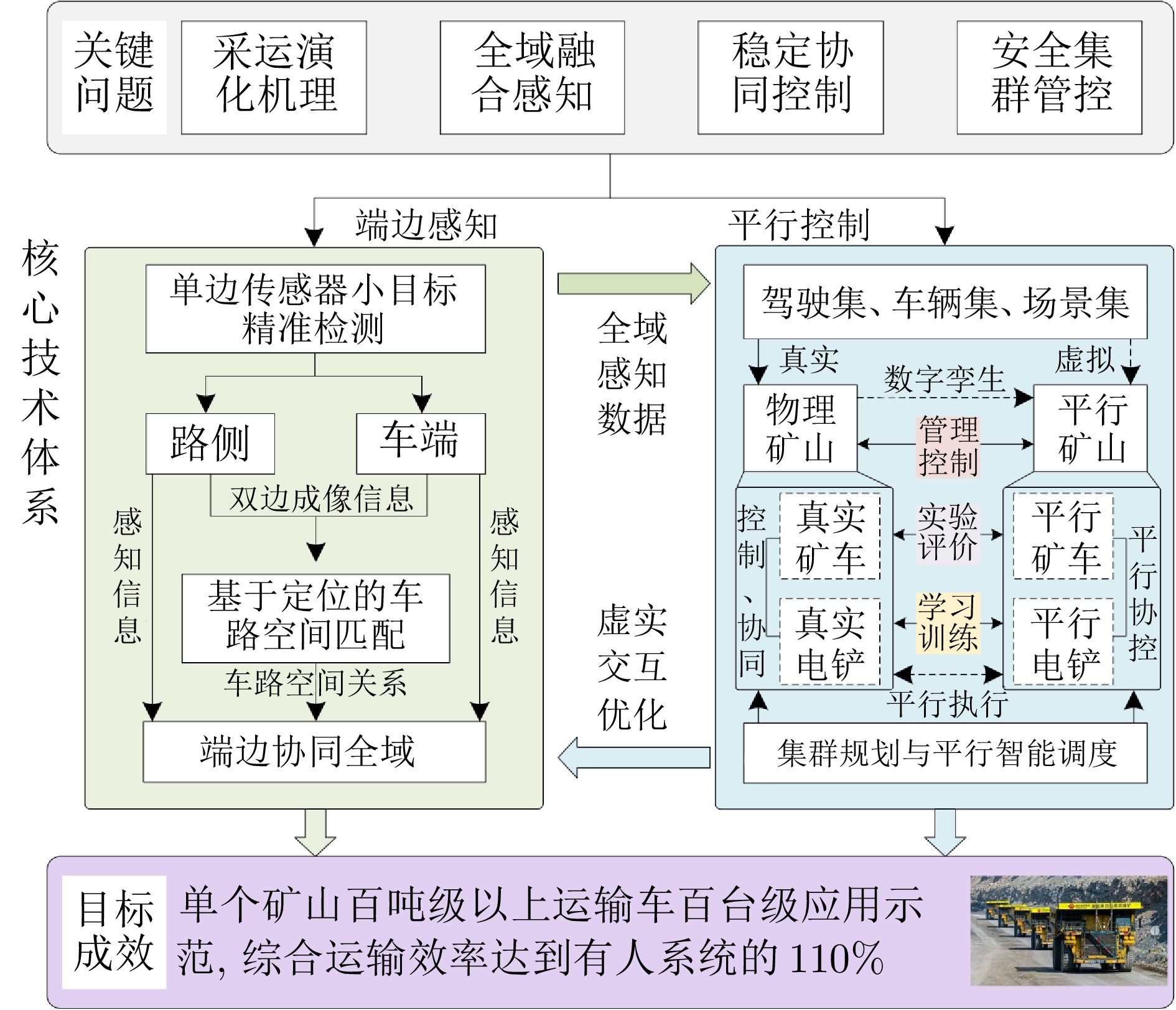
图3 机器人化采运的“端边感知、平行控制”智慧架构
我国以露天矿用卡车为代表的露天矿重型运输装备, 其无人驾驶技术近年来逐步崭露头角, 已成为推动露天矿智能化转型的关键力量. 如今, 国产化的无人驾驶矿卡已在国内多个露天矿山投入使用, 并逐步走向国际市场. 通过技术自主创新与示范应用并举, 我国的无人驾驶矿卡正从“技术追赶” 向“全球领先”迈进, 露天矿重型作业装备正处于自动化到具身智能过渡的关键节点, 团队研发露天矿无人驾驶卡车“端边感知、平行控制”技术, 得到如下结论:
1)端边感知理论与技术具有车端与路端精准感知与融合的全域感知能力, 解决了露天矿山恶劣天气及道路盲区场景下单车感知受限的难题, 可实现恶劣环境下小目标精准检测、特征退化场景下基于定位的车路空间匹配与多任务场景下端边协同全域感知.
2)平行控制理论与技术通过构建单车控制、协同控制与调度控制的智能控制体系车辆, 显著提升车辆控制精度与协同作业效率, 克服了传统控制方法的局限性, 实现无人驾驶矿车在复杂环境下的高精度控制与智能协同.
3)“端边感知、平行控制”技术架构是露天矿山智能化建设的中国方案, 核心成果体现为大型露天矿山机器人化采运的“双十、双百、双千”, 形成了从关键技术突破、标准制定, 到机器人化无人驾驶车群、达到人工驾驶作业效率, 再到大规模推广应用, 最终实现机器人化采装运输综合作业效率提高10%的创新突破.
未来, 随着露天矿机器人化采运理论与技术的普及与完善, 基于“端边感知、平行控制”的智能矿山有赖于突破单一车辆的自动化范式, 转向一个集成了智能感知、协同控制与人机交互的系统性工程.
在智能感知层面, 需构建“端侧实时处理−边缘全局融合”的协同架构. 端侧专注于轻量化、高实时性的局部环境感知, 而边缘侧则融合多源异构数据, 构建矿区全景动态地图, 以克服单车感知的视野局限. 进一步, 探索引入物理先验的因果感知模型, 使系统不仅能识别物体, 更能理解地质力学与车辆动力学等内在规律, 实现从状态识别到风险溯因与预测的跨越.
在协同控制层面, 平行控制理论为多机协同提供了新范式. 未来研究应聚焦于构建一个集分布式优化、平行智能与韧性控制于一体的协同架构. 首先, 分布式优化方法通过在云端或边缘侧利用数字孪生进行全局预规划, 并在端侧基于局部信息实现实时控制, 借助分布式模型预测控制等算法平衡全局优化与局部自主. 其次, 深度融合ACP平行控制理论最优策略, 实现虚实闭环与系统持续演化. 同时, 为增强系统在极端工况下的可靠性, 也需研究通信受限下的韧性控制策略, 通过V2V局部通信与降级控制机制, 确保在网络中断时仍能维持基本协同与安全避障.
而在人机交互层面, 核心是构建双向透明的可信协同机制, 融合端边感知与平行控制并提出平行视觉技术, 实现可将人工系统的感知结果、决策逻辑与预测轨迹通过增强现实(augmented reality, AR)界面直观呈现给远程操作员, 极大提升了系统的可解释性. 此外, 系统应具备动态权责分配能力, 能够在线评估自身性能边界, 并主动、平滑地发起人机协同介入, 将人类智慧无缝融入自主决策闭环. 综上所述, 通过深度融合端边感知与平行控制, 露天矿自主作业将有望演进为一个数据驱动、虚实交融、人机协同的“矿山元宇宙”, 推动我国露天矿智能化高质量发展, 形成煤矿行业绿色可持续发展的新质生产力.
作者简介
葛世荣
中国工程院院士, 中国矿业大学(北京)教授. 主要研究方向为智能采矿装备, 摩擦可靠性. E-mail: gesr@cumtb.edu.cn
杨健健
中国矿业大学(北京)机械与电气工程学院教授. 2013年获得中国矿业大学(北京)博士学位. 主要研究方向为矿山机器人、装备智能化、矿山自动驾驶. 本文通信作者.E-mail: Yangjj@cumtb.edu.cn
黄乾坤
中国矿业大学(北京)机械与电气工程学院博士研究生. 主要研究方向为露天矿机器人化采运, 多体动力学.E-mail: m18810260819@163.com
宋瑞琦
中国科学院自动化研究所多模态人工智能系统全国重点实验室助理研究员. 2016年获得北京航空航天大学硕士学位. 主要研究方向为自动驾驶、具身智能及人工智能.E-mail: ruiqi.song@ia.ac.cn
陈龙
中国科学院自动化研究所多模态人工智能系统全国重点实验室研究员. 2013年获得武汉大学博士学位. 主要研究方向为自动驾驶, 具身智能及人工智能.E-mail: long.chen@ia.ac.cn
陈鹏
北京航空航天大学交通科学与工程学院教授. 2012年获得日本名古屋大学博士学位. 主要研究方向为自动驾驶行为决策与轨迹规划.E-mail: cpeng@buaa.edu.cn
杨胜利
国能准能集团有限责任公司高级工程师. 2015年获得内蒙古工业大学硕士学位. 主要研究方向为露天矿大型设备智能化, 无人驾驶.E-mail: 10576546@ceic.com
何适
航天重型工程装备有限公司正高级工程师. 2014年获得华中科技大学硕士学位. 主要研究方向为特种车辆整车控制、线控系统及智能驾驶.E-mail: hs22@mails.tsinghua.edu.cn
丁震
国家能源投资集团有限责任公司正高级工程师. 2015年获得中国矿业大学(北京)硕士学位. 主要研究方向为煤矿采掘装备、煤矿智能化、露天矿无人驾驶、煤炭行业大模型.E-mail: 10000340@ceic.com
王飞跃
中国科学院自动化研究所研究员. 主要研究方向为平行系统的理论与应用, 社会计算, 平行智能以及知识自动化.E-mail: feiyue.wang@ia.ac.cn
https://blog.sciencenet.cn/blog-3291369-1522342.html
上一篇:切换拓扑下混合相对阶异构多智能体系统自适应扰动抑制设计
下一篇:云−边−端协同下考虑多车影响的混行车群集中式协同控制
