博文
低空立体交通跨模式协同与智能调度研究综述
|
引用本文
段海滨, 梅宇, 范彦铭. 低空立体交通跨模式协同与智能调度研究综述. 自动化学报, 2026, 52(2): 194−209 doi: 10.16383/j.aas.c250369
Duan Hai-Bin, Mei Yu, Fan Yan-Ming. A review of cross-modal coordination and intelligent scheduling for low-altitude three-dimensional transportation. Acta Automatica Sinica, 2026, 52(2): 194−209 doi: 10.16383/j.aas.c250369
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250369
关键词
低空立体交通,跨模式协同,智能调度,协同控制,异构分布
摘要
随着低空立体交通系统进程的加速推进, 空中、地面与水面三维异构交通平台的协同愈加关键. 智能调度与资源优化的深度融合, 正逐步成为智慧城市建设与应急响应体系中不可或缺的核心支撑力量. 本文围绕多模式协同调度的研究热点展开综述. 首先, 综合回顾无人机、无人车与无人艇在多源信息融合、环境感知与自适应决策方面的协同机制. 其次, 从任务分解、路径规划、协同控制与系统调度四个层面, 总结强化学习、图优化、进化算法等在复杂动态环境下的典型调度方法. 进一步地, 梳理集中式、分布式与混合式控制架构下的任务分配与通信策略, 并分析传感器数据、仿真数据与运行大数据在调度优化中的作用. 最后, 探讨当前低空立体交通系统在资源分配、安全保障与跨域协同中的关键挑战, 并展望基于大数据驱动与智能增强的低空立体交通系统未来发展路径.
文章导读
随着智能城市、智能物流和空天技术的快速发展与深度融合, 低空立体交通系统逐步成为未来多模态智能交通网络的核心支柱. 该系统的核心目标是实现空中、地面与水面三维空间中各类自动化交通工具之间的协同与智能调度, 其中无人机(unmanned aerial vehicle, UAV)[1]、无人车[2]和无人艇[3]各自扮演着不同的角色. 无人机主要负责空中作业, 提供高效、灵活的任务执行能力; 无人车则作为地面交通主力, 承担城市内部的物流与运输任务; 无人艇则负责水面上的交通与感知任务. 尽管它们在空间维度上有所区分, 但必须通过智能调度系统实现深度协同, 共同支撑低空立体交通系统的高效运行.
无人机系统凭借其快速机动、灵活部署和高效作业等优势, 在城市物流、灾害监测、应急救援等领域具有广泛应用. 现代无人机已集成激光雷达、视觉感知、红外传感等多源传感器, 具备较强的环境感知与路径自主规划能力[4]. 然而在复杂的城市环境中, 实现无人机与地面车辆、水面船只的协同作业依旧面临跨域感知、实时通信和路径交互等多维挑战. 例如, Xin等[5]提出基于多模态传感融合算法的路径优化策略, 有效提升了无人机在城市峡谷和动态障碍物环境中的任务完成率.
无人车作为城市地面交通的主力, 其路径规划和障碍物规避技术已经相对成熟. 然而低空立体交通系统要求无人车不仅与道路元素进行协作, 还需与空中水面交通实体在调度层面高效协同[6]. 近年来, 伴随深度强化学习与多智能体系统控制方法的引入, 无人车在高密度城市环境中已具备更强的路径自适应能力[7], 尤其在动态交通交汇点和资源共享路口等典型场景中展现出强大的路径重构与任务协调潜力[8].
无人艇在低空立体交通系统中承担着水面与海岸线之间的交通与感知职责, 广泛应用于水域巡逻、环境监控与海事数据采集等任务. 文献[9]研究表明, 无人艇与无人机的协同部署在海岸防控和环境监测中, 不仅提升信息覆盖率, 还优化应急响应速度. 然而海洋环境中的不稳定动力扰动和非线性水面流态等因素增加了跨模态路径规划与任务分配的复杂性[10].
面对以上挑战, 跨模式的感知融合与智能调度机制成为研究核心. 空地一体化系统要求无人系统之间实时共享状态信息、资源需求与任务分工结果, 从而构建协同感知、协同决策与协同执行的一体化控制体系[11]. 如Li等[12]基于图神经网络实现的多无人系统任务匹配机制, 显著提高了多交通实体在大规模动态任务环境中的响应效率. 此外, 如何在通信受限或失联场景下保持系统鲁棒性与自治能力也是关键研究方向. Shen等[13]提出一种事件驱动下的分布式控制策略, 使无人系统可在部分链路丢失的情况下仍能进行协同任务执行; 而目前无人系统进一步结合了5G切片与边缘计算[14], 在保持低时延的同时, 保障系统安全性与灵活性. 在调度层面, 融合博弈论、优化算法与预测控制的联合调度系统正在崛起. Kang等[15]提出基于层次博弈与时空资源预测的协同调度框架(见图 1, HAP (high-altitude platform), GDs (ground devices)), 成功应用于城市高峰期的多交通协同任务管理, 有效避免资源冲突与瓶颈环节.
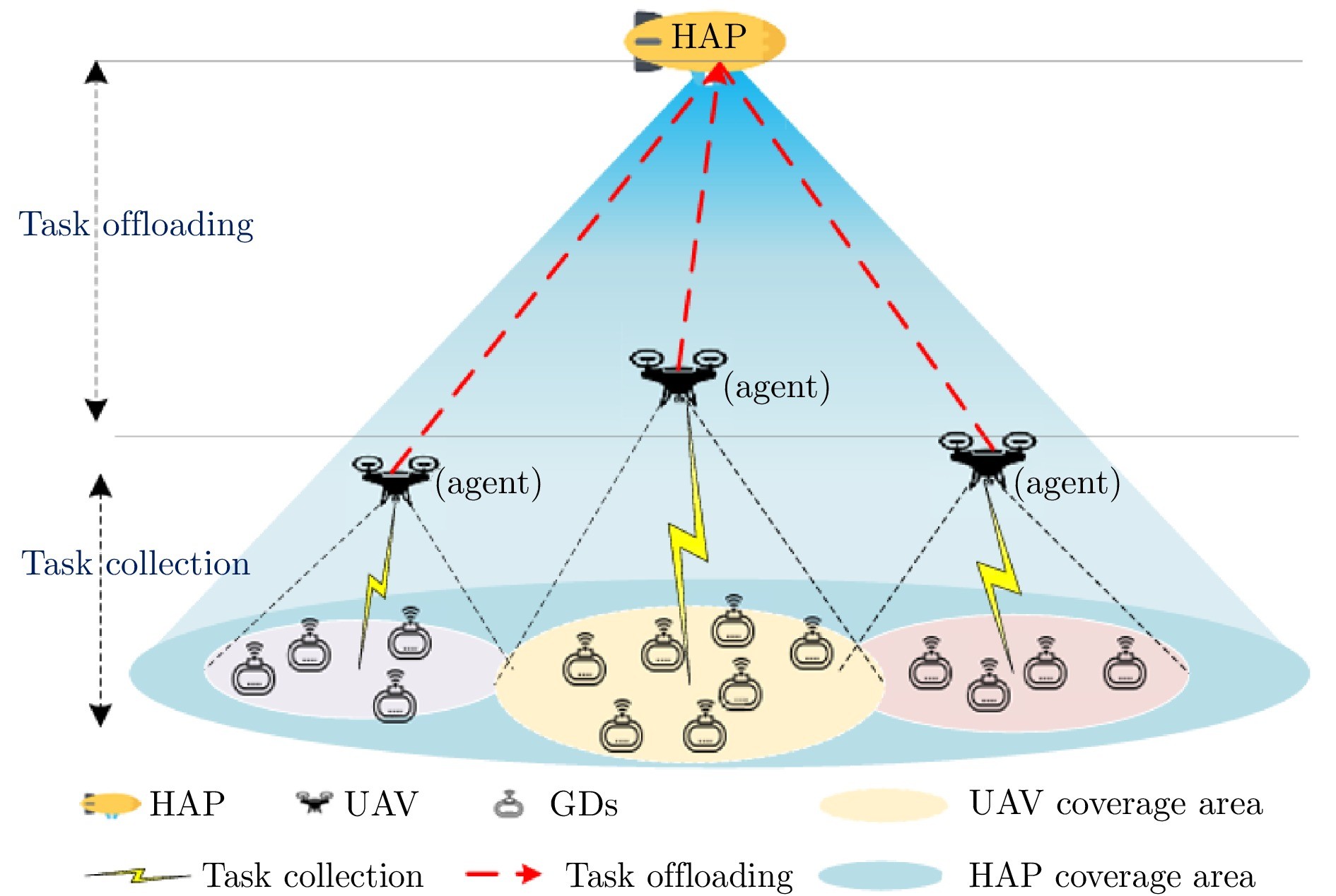
图1 临时应急空天通信示意图
综合来看, 低空立体交通已成为智慧城市中至关重要的基础设施构件. 无人机、无人车与无人艇之间的融合协同正在推动城市从“二维道路网络”迈向“立体智慧交通生态”. 尽管当前研究已取得诸多进展, 但未来仍需进一步突破多模态通信协同瓶颈、提升全局感知与自主调度能力, 并构建具有高适应性、高容错性与高决策力的一体化交通系统.
本文内容安排如下: 第1节讨论不同的跨域协同控制架构, 特别是在无人机、无人车和无人艇之间的信息共享与任务分配机制; 第2节聚焦低空立体交通系统中的感知需求, 包括传感器数据、实时环境数据以及大数据分析, 分析这些感知数据如何支持系统优化和决策; 第3节分析大数据与智能算法在路径规划、任务调度和资源优化等方面的应用, 探讨如何实现多交通工具的智能协同; 第4节介绍低空立体交通系统中5G与物联网如何实现信息共享与实时决策, 提升系统的协同能力; 最后, 第5节对全文进行总结并提出未来研究方向, 重点讨论如何突破当前的技术瓶颈, 推动低空立体交通系统的进一步发展.
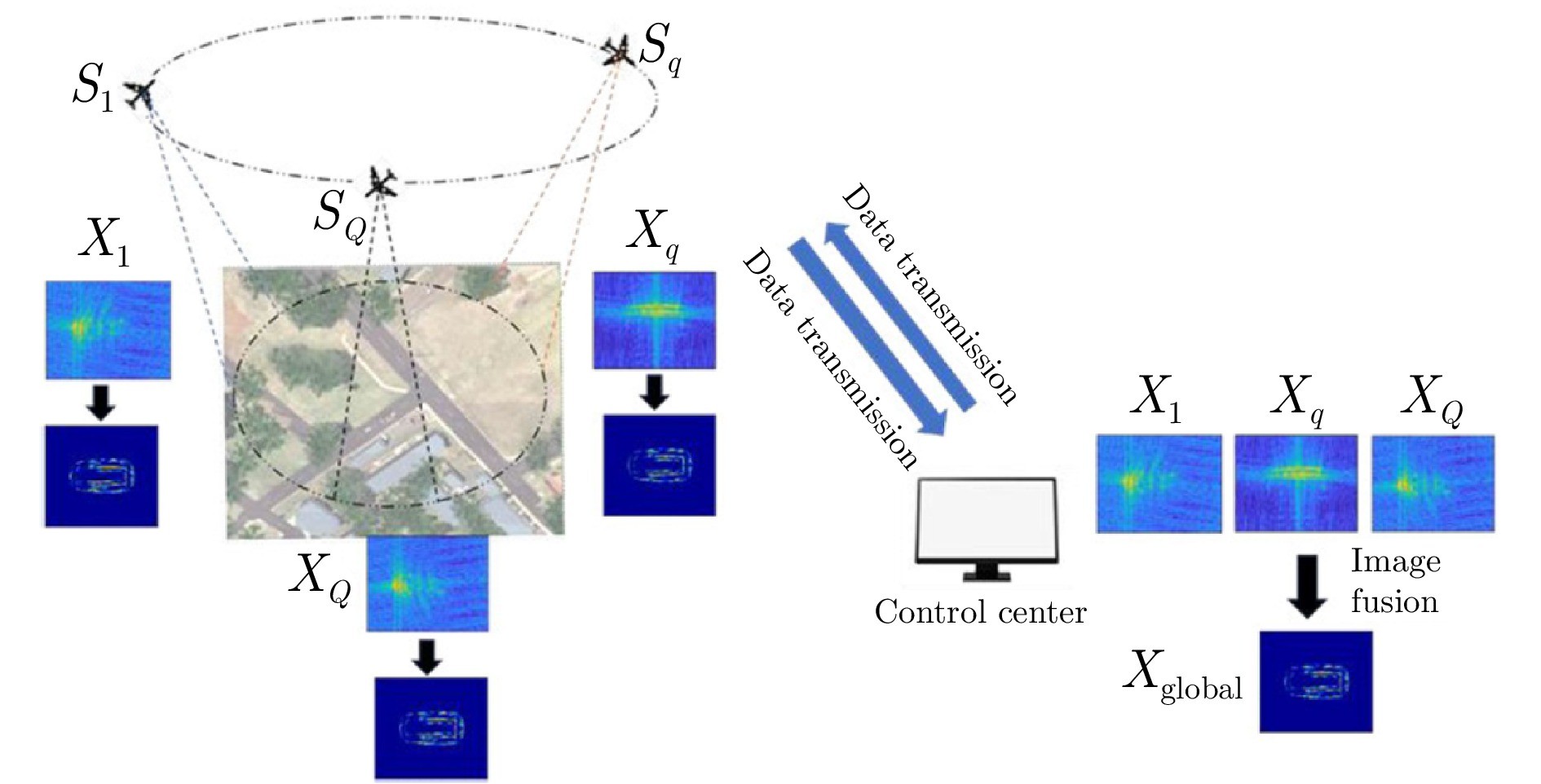
图2 无人机群SAR多角度观测感知成像过程示意图
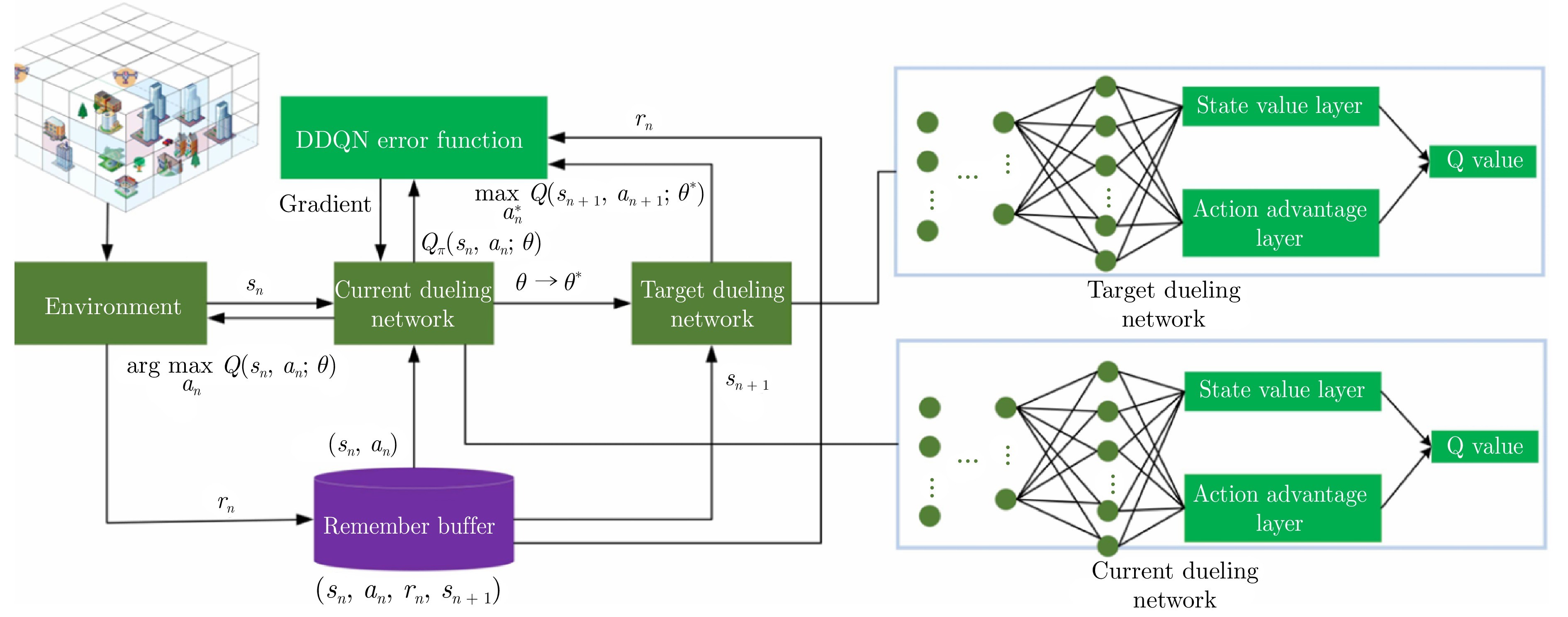
图3 基于概率视距(line of sight, LoS)信道的无人机辅助多地面终端操作框架示意图
尽管低空立体交通系统在技术上取得了显著进展, 但其广泛应用仍面临诸多挑战. 首先, 多源异构数据的处理与实时传输, 特别是数据安全性和实时性方面仍存在瓶颈. 其次, 智能调度和资源优化的实时性与精准性需要进一步提升, 尤其是在大模型推理与响应速度之间的平衡亟需突破. 最后, 跨领域系统的协同整合, 尤其是高效的资源优化与调度, 是低空立体交通系统能否实现大规模落地的关键. 未来, 低空立体交通系统的发展不仅需要技术的单一突破, 更需要在资源调度、空域管理及大数据通信等多维度领域实现协同创新. 人工智能、空地一体化大数据通信和自主决策等技术的深入融合, 将推动低空立体交通系统逐步成为未来智慧城市交通体系的核心力量, 也为城市交通智能化、立体化和高效化迈出关键步伐.
作者简介
段海滨
北京航空航天大学自动化科学与电气工程学院教授. 主要研究方向为无人机集群仿生自主飞行控制. 本文通信作者. E-mail: hbduan@buaa.edu.cn
梅宇
北京航空航天大学博士研究生. 主要研究方向为仿生无人机集群控制, 非线性控制和混沌系统. E-mail: My854278@buaa.edu.cn
范彦铭
沈阳飞机设计研究所飞行控制专业领域首席专家. 主要研究方向为先进飞行控制技术研究与系统研制. E-mail: michaelfan@yeah.net
https://blog.sciencenet.cn/blog-3291369-1524832.html
上一篇:低空立体多模式交通专刊序言
下一篇:城市空中交通系统最优规模评估与调度
