博文
基于部分状态反馈的燃料电池系统协同滑模控制
|
引用本文
王凌枫, 杨宇杰, 王江鹏, 郭方洪, 吴争光, 苏宏业, 王雷. 基于部分状态反馈的燃料电池系统协同滑模控制. 自动化学报, 2025, 51(12): 2609−2620 doi: 10.16383/j.aas.c250358
Wang Ling-Feng, Yang Yu-Jie, Wang Jiang-Peng, Guo Fang-Hong, Wu Zheng-Guang, Su Hong-Ye, Wang Lei. Coordinated sliding mode control of fuel cell systems based on partial state feedback. Acta Automatica Sinica, 2025, 51(12): 2609−2620 doi: 10.16383/j.aas.c250358
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250358
关键词
质子交换膜燃料电池,空气供给子系统,氧气过量比,阴极压力,滑模控制
摘要
质子交换膜燃料电池因其高效清洁的特性, 成为替代传统内燃机的理想选择. 在质子交换膜燃料电池系统中, 空气供给子系统的氧气过量比与阴极压力是影响其性能和寿命的关键变量. 然而, 这些变量在实际应用中通常难以直接测量, 且系统模型存在参数不确定性. 为应对上述挑战, 提出一种部分状态反馈预设时间协同控制策略. 该策略的核心在于, 首先创新性地设计仅依赖于可测状态与目标设定值的“引导变量”, 并借助输入−状态稳定性理论, 将原控制问题转化为“引导变量”的镇定问题. 随后, 选取“引导变量”及其导数的线性组合来构建滑模面, 并提出一种基于障碍李雅普诺夫函数的自适应滑模控制律, 确保滑动变量在预设时间内收敛至指定小邻域内, 从而间接实现对氧气过量比和阴极压力的精确控制, 同时抑制测量噪声的干扰. 该方法规避了对关键状态的直接测量需求, 且不依赖于精确的系统模型参数. 仿真与硬件在环实验结果验证了所提策略具有优异的动态响应性能和对参数不确定性的鲁棒性.
文章导读
化石能源的过度消耗与温室气体排放已引发严峻的环境问题, 推动全球对清洁能源交通方案的探索[1−2]. 在此背景下, 氢燃料电池汽车因其能量转换效率高、零排放等优点, 被公认为替代传统燃油汽车的有力竞争者[3−4]. 质子交换膜燃料电池(Proton exchange membrane fuel cell, PEMFC)作为其核心动力源, 具有工作温度低、启动迅速等特性, 在汽车动力应用中展现出巨大潜力[5−7], 其原理如图1所示.
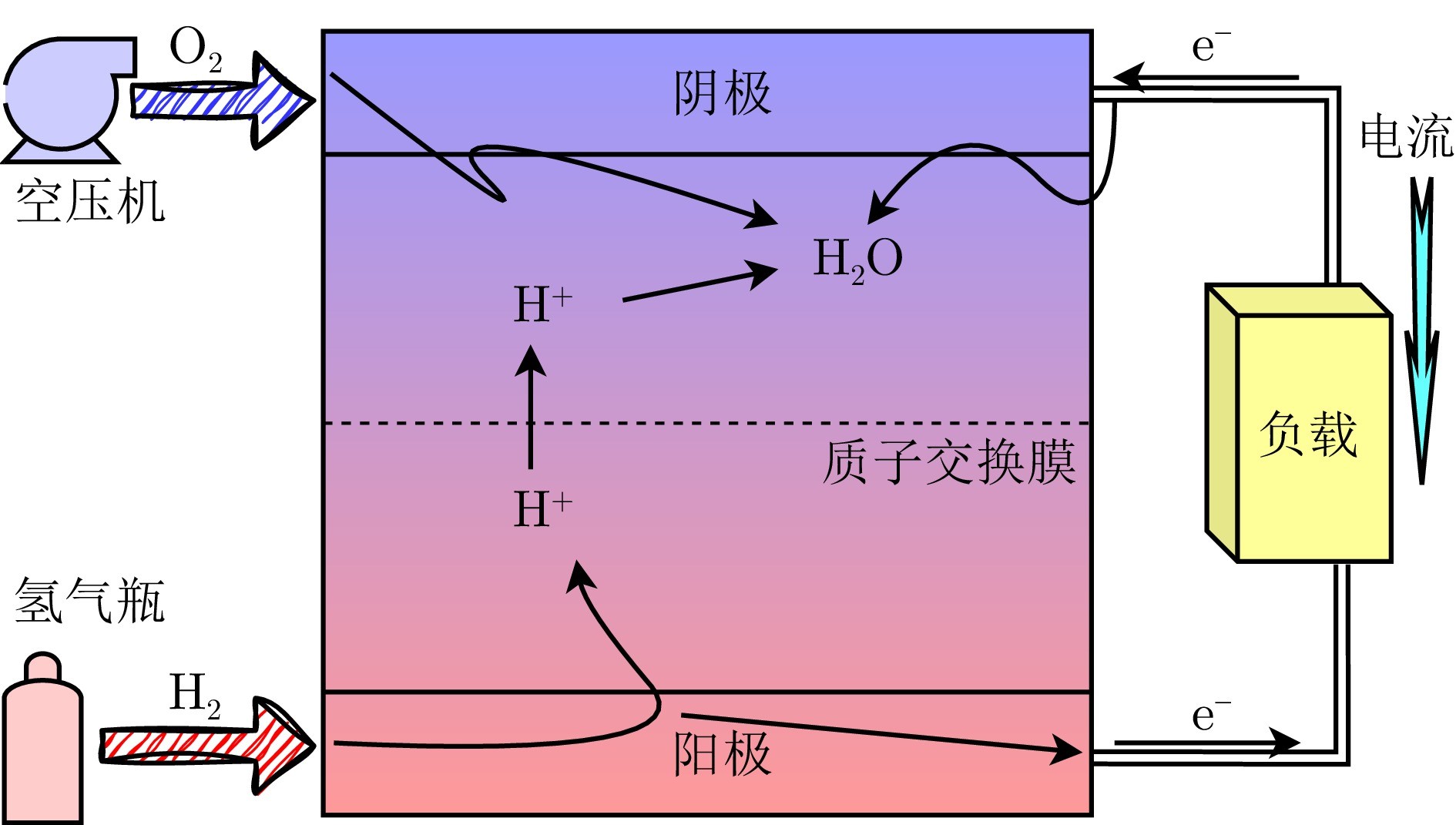
图1 质子交换膜燃料电池发电原理示意图
在PEMFC系统中, 空气供给子系统的性能至关重要. 该子系统负责向阴极精确输送反应所需的氧气, 其两个关键控制变量——氧气过量比和阴极压力, 直接决定燃料电池的运行效率与工作寿命. 氧气供给不足(“氧饥饿”)或压力失调不仅会显著降低电池效率, 还可能导致质子交换膜损坏等不可逆的严重后果[8−10]. 因此, 对空气供给子系统进行深入的机理建模并设计高效、鲁棒的控制策略, 对于保障整个燃料电池系统的可靠与高效运行具有重要意义.
针对PEMFC空气供给子系统的控制问题, 学术界已开展广泛研究. 早期研究以Pukrushpan等[11]提出的九阶非线性模型为基础, 该模型基于气体动力学和热力学原理, 详尽地描述系统的动态特性. 后续研究者如Suh[12]和Talj等[13]对该模型进行简化, 以便于控制器的设计. 在控制策略方面, 从早期的线性化方法, 到后来为处理系统强非线性而开发的滑模控制[14−15]、反馈线性化[16]、动态面控制[17]、模型预测控制[18]、平方和控制[19]以及模糊控制[20]等先进非线性控制技术, 均取得显著进展. 然而, 这些方法大多依赖于精确的系统模型. 为应对模型不确定性的挑战, 无模型控制方法应运而生, 如文献[21]提出的模糊自适应控制、文献[22]提出的极值搜索与无模型自适应相结合的策略、文献[23]提出的基于长短期记忆网络的模型预测控制以及文献[24]提出的基于深度强化学习的智能控制方法.
随着技术发展, 可变开度背压阀的应用使氧气过量比与阴极压力的协同控制成为可能. 现有研究提出多种解耦与协同控制方案, 例如文献[25]开发一种数据驱动的二阶离散滑模自适应控制和一种基于李雅普诺夫函数的反步控制方法以分别控制氧气过量比和阴极压力; 文献[26]利用输入输出线性化将系统解耦, 并分别采用神经网络控制和基于规定性能函数的控制; 文献[27]建模两输入两输出系统, 并设计基于扰动观测器的反馈线性化控制算法来实现同时控制; 文献[28]使用综合可变增益鲁棒模型预测控制, 通过离线求解线性矩阵不等式来计算两输入两输出系统的显式线性状态反馈控制律; 文献[29−30]设计自适应反步控制方法, 实现氧气过量比和阴极压力协调控制的同时允许模型参数的不确定性.
出于结构密封性和安全性的考虑, 燃料电池电堆内部通常无法安装传感器, 导致氧气过量比和阴极压力这两个关键状态无法直接测量. 文献[14]提出高增益观测器, 从系统可测量状态的动态中获取氧气过量比和阴极压力的估计. 随后, 卡尔曼滤波[31]、自适应无迹卡尔曼滤波[32]、极值搜索[33]、事件触发机制[34]等方法应用在观测器中以减小测量噪声的影响. 此外, 为保证系统的动态性能, 文献[35]提出固定时间收敛的观测器和预设时间收敛的控制器, 文献[36]进一步提出固定时间容错控制, 文献[37]则进一步考虑性能约束和输入饱和等因素. 然而, 上述基于观测器的估计方法依赖于精确的系统模型参数, 对参数辨识的精度要求极高.
为克服上述挑战, 本文提出一种基于滑模算法的部分状态反馈预设时间协同控制策略. 其核心创新点在于: 首先, 构建仅依赖于部分可测状态、目标设定值及已知参数的“引导变量”, 并利用输入−状态稳定性理论, 将原控制问题转化为“引导变量”的镇定问题, 从而规避了对不可测输出(氧气过量比和阴极压力)的直接依赖; 然后, 基于该“引导变量” 及其导数构造滑动变量, 并且设计一种基于障碍李雅普诺夫函数的自适应滑模控制律, 确保滑动变量在预设时间内收敛至指定的小邻域内, 进而实现对氧气过量比和阴极压力的间接、快速且精确的控制, 同时抑制测量噪声的干扰. 本方法无需直接测量关键状态, 不依赖精确的系统模型参数, 仅利用部分可测状态反馈, 并对参数不确定性具有鲁棒性.
本文的组织结构如下: 第1节描述PEMFC空气供给子系统的物理模型并阐述控制问题; 第2节介绍所提出的部分状态反馈协同滑模控制策略; 第3节通过Simulink仿真验证方法的有效性; 第4节展示硬件在环实验结果; 第5节对全文进行总结与展望.
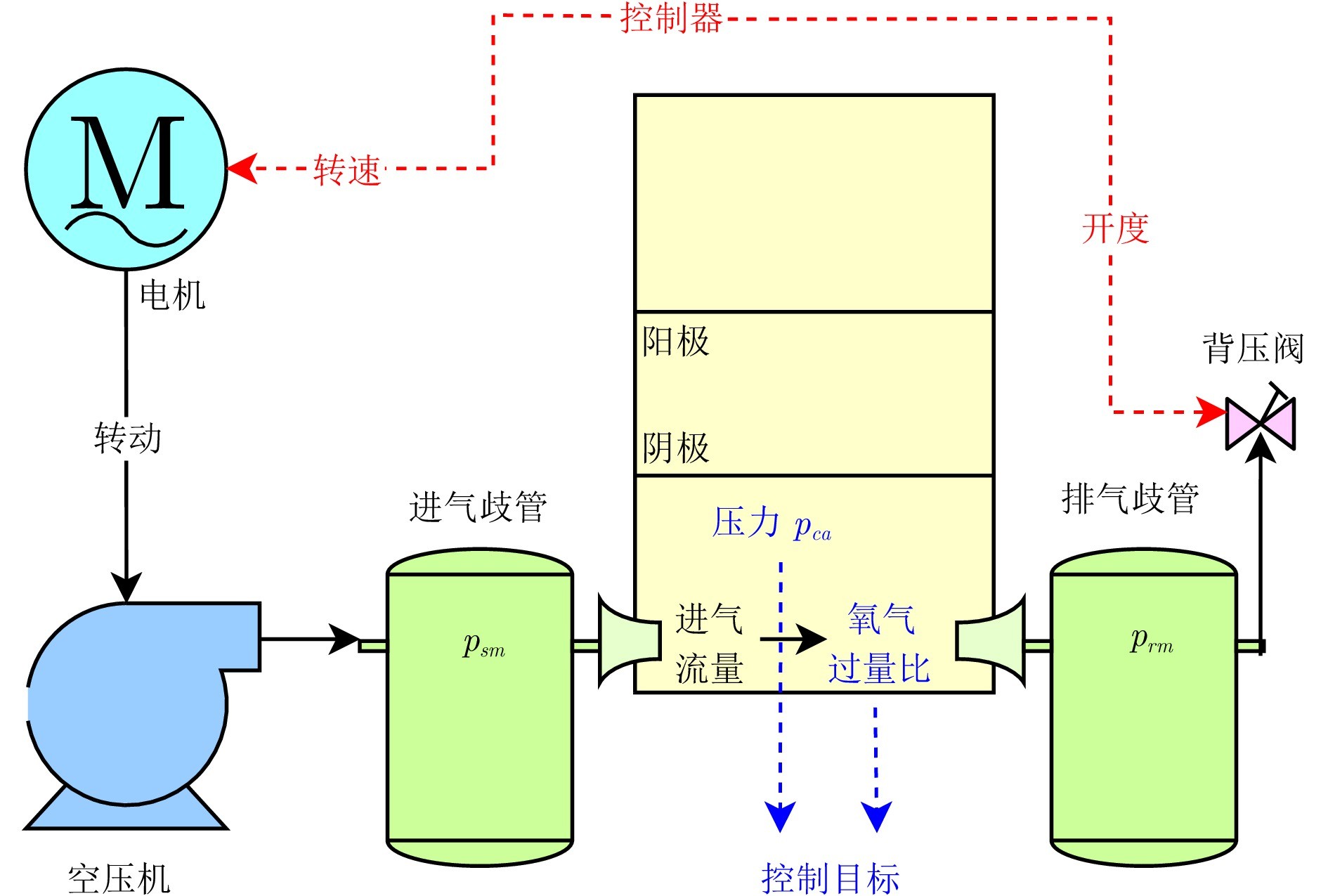
图2 质子交换膜燃料电池空气供给子系统示意图
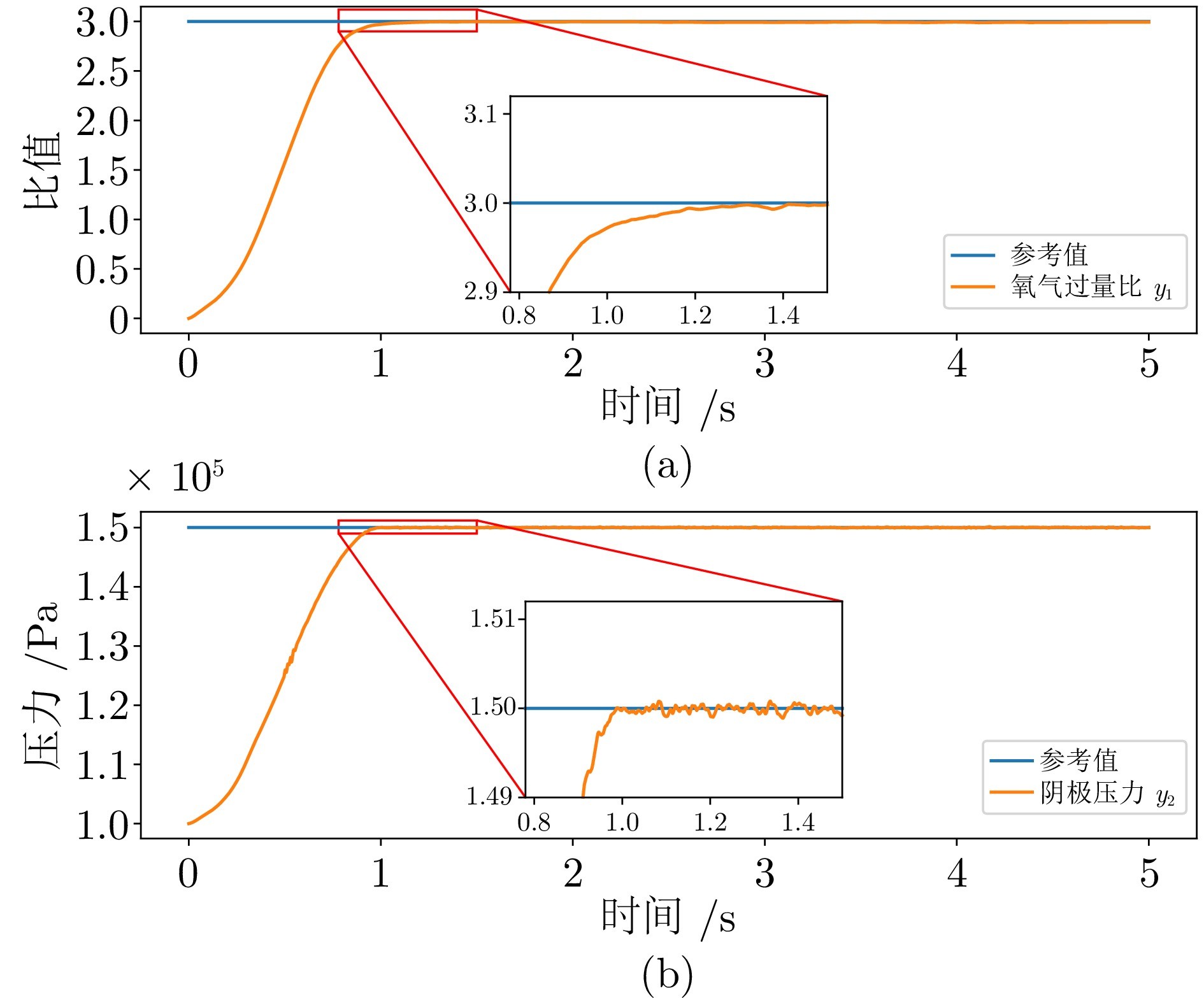
图3 系统控制目标与参考值的对比((a)氧气过量比; (b)阴极压力)
本文针对质子交换膜燃料电池空气供给子系统面临的关键状态不可测及模型参数不确定两大控制难题, 提出了一种创新的部分状态反馈预设时间协同控制策略. 该策略通过引入仅依赖可测状态的“引导变量”, 并结合输入−状态稳定性理论, 成功地将复杂的输出跟踪问题转化为一个更易处理的镇定问题, 并在此基础上设计了基于障碍李雅普诺夫函数的自适应滑模控制律. 该控制律保证了系统误差在预设时间内收敛至指定的性能边界内. 该方法的核心优势在于, 它无需直接测量氧气过量比和阴极压力, 且对系统模型参数不确定性具有高度的鲁棒性, 展现出强大的工程实用价值. 详尽的仿真分析与严格的硬件在环实验验证了所提控制策略具有优异的动态响应特性和鲁棒性, 为PEMFC空气供给系统的高效稳定运行提供了一种富有前景的解决方案.
虽然本文所提出的控制方法展现出良好的性能, 但在实际应用中存在多种复杂工况切换、控制算法计算成本和实时性等问题需要考虑. 未来的研究方向将集中于以下几个方面: 1)将所提控制策略扩展到更宽的工况范围, 研究其在动态工况切换条件下的适应性; 2)考虑空气子系统与燃料电池其他子系统的耦合关系, 设计综合考虑多子系统协同的整体控制架构; 3)探索控制算法在计算效率上的进一步优化, 以满足车载嵌入式控制器的实时性需求.
作者简介
王凌枫
浙江大学控制科学与工程学院硕士研究生. 主要研究方向为燃料电池空气供给系统控制. E-mail: yayafengzi@zju.edu.cn
杨宇杰
浙江大学控制科学与工程学院博士研究生. 主要研究方向为质子交换膜燃料电池混合动力系统能量管理和质子交换膜燃料电池热管理. E-mail: yujie.yang@zju.edu.cn
王江鹏
浙江大学控制科学与工程学院博士研究生. 主要研究方向为燃料电池空气供给系统控制与非线性控制. E-mail: 12432108@zju.edu.cn
郭方洪
浙江工业大学信息工程学院副教授. 2016年获得新加坡南洋理工大学博士学位. 主要研究方向为微电网分布式控制与优化, 工业互联网. E-mail: fhguo@zjut.edu.cn
吴争光
浙江大学控制科学与工程学院教授. 2011年获得浙江大学控制科学与工程专业博士学位. 主要研究方向为马尔科夫跳变系统, 网络化系统, 智能电网. E-mail: nashwzhg@zju.edu.cn
苏宏业
浙江大学控制科学与工程学院教授. 1995年获得浙江大学工业自动化专业博士学位. 主要研究方向为控制理论与控制工程. E-mail: hysu@iipc.zju.edu.cn
王雷
浙江大学控制科学与工程学院研究员. 2016年获得浙江大学控制科学与工程专业博士学位. 主要研究方向为非线性估计、控制、优化与学习, 氢燃料电池系统, 新能源电力系统, 动态系统的隐私安全分析与防护. 本文通信作者. E-mail: lei.wangzju@zju.edu.cn
https://blog.sciencenet.cn/blog-3291369-1517797.html
上一篇:智能机器人类脑情景认知方法研究现状与展望
下一篇:“结构−内容”框架下融合时空特征的技术预测模型
