博文
精细抗干扰控制——从干扰不变性到适应可变性
|
引用本文
谢一嘉, 李文硕, 朱玉凯, 崔洋洋, 郭雷. 精细抗干扰控制——从干扰不变性到适应可变性. 自动化学报, 2025, 51(10): 2201−2210 doi: 10.16383/j.aas.c250211
Xie Yi-Jia, Li Wen-Shuo, Zhu Yu-Kai, Cui Yang-Yang, Guo Lei. Refined anti-disturbance control: From disturb-ance invariance to adaptive variability. Acta Automatica Sinica, 2025, 51(10): 2201−2210 doi: 10.16383/j.aas.c250211
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250211
关键词
精细抗干扰控制,复合抗干扰控制,干扰利用,干扰适应可变性准则,智能系统工程
摘要
抗干扰是控制科学和智能科学的基本主题之一. 长期以来, 干扰不变性被视为抗干扰控制方法的一个设计准则. 然而, 干扰不变性设计带来的控制代价易被忽视, 且往往不满足执行机构和信息拓扑等系统软硬件限制. 本文在干扰不变性准则的基础上, 提出干扰适应可变性准则和设计思想. 主要实现途径包括: 干扰深耦合建模、干扰可抗/可用度量化、复合抗干扰控制、干扰主动和精细利用、基于抗扰能力量化的系统重构优化等. 在此基础上, 进一步提出系统进化设计、进化智能和智能系统工程的思想, 从“任务目标−干扰因素−系统资源”一体化的角度提高动态适配性, 实现闭环系统的行为进化和形态进化. 干扰适应可变性准则突破了传统干扰不变性准则的藩篱, 实现了从“抗干扰”到“识干扰”、“用干扰”的干扰精细控制理论跨越, 为精细抗干扰控制理论和智能系统工程实践提供了新的理论支撑、研究视角和技术途径.
文章导读
干扰与不确定性广泛存在于各类实际控制系统中[1−13]. 无论是外界环境扰动、内部器件误差和系统模型不确定性等客观存在的干扰因素, 还是博弈对抗态势下的干扰、欺骗、攻击信号, 都会对控制系统的性能甚至安全性产生关键影响[8−9]. 对干扰与不确定性的认知和处理长期以来都是控制科学乃至智能科学的一个基本问题, 认识和处置未知与不确定性已成为无人系统智能化的目标[14−15].
早在十九世纪, 法国数学家彭赛列就提出通过动态平衡机制以实现系统对外部扰动适应性的思想, 为后续抗干扰控制理论的发展提供了哲学框架[16]. 二十世纪50年代, 英国学者Ashby[6]指出: “在无处不在的干扰与不确定性下实现生存, 是有机体和控制系统的共同目标”.
国内外学者从干扰抑制和补偿两个方面对干扰和不确定性进行了研究(参见文献[17−20]). 冯纯伯[9]在1995年论及系统的不确定性时指出: 建模误差、材料形变、结构非线性等模型扰动和外部干扰会破坏系统的稳定性和相关性能. 黄琳等[12]在2003年论及控制科学的复杂性时指出: 控制科学的研究必须针对非理想环境, 即必须讨论不确定性对系统性能的影响, 并研究能适应不确定性的控制器设计方法以及对应理论. 在2023年外滩大会[21]的主旨报告中, 机器学习专家Jordan[22]指出: 对自身不确定性的量化评估是当前人工智能大语言模型面临的主要挑战之一.
在干扰补偿控制领域, 干扰不变性长期以来被视作基本的设计准则. 干扰不变设计是指通过补偿干扰影响以期恢复系统标称性能的设计[2, 5, 7, 23−24], 包括自抗扰控制 (Active disturbance rejection control, ADRC)、干扰观测器控制 (Disturbance observer based control, DOBC)在内的经典控制方法都建立在干扰不变性准则的基础上[16, 24]. 这些基于干扰不变性准则的控制设计已得到广泛成功应用. 但是随着研究的深入和应用的拓展, 干扰不变性准则的局限性也逐渐凸显, 促使人们反思并寻找更加精细和智能的控制设计范式.
本文首先概述基于干扰不变性准则的抗干扰控制研究进展. 在此基础上提出干扰适应可变性准则和设计思想, 并阐述其主要实现途径: 干扰深耦合建模、干扰可抗/可用度量化、复合抗干扰控制、干扰主动和精细利用、基于抗扰能力量化的系统重构优化. 在此基础上, 进一步提出系统智能测评与进化设计思想, 为仿生智能和智能系统工程的研究与实践提供一种新的研究视角和解决途径. 本文在前期多源干扰系统复合抗干扰控制[17, 20]和复合干扰滤波理论[25]的基础上, 从抗干扰能力和性能指标的角度研究抗干扰控制问题. 本文总体脉络如图1所示.
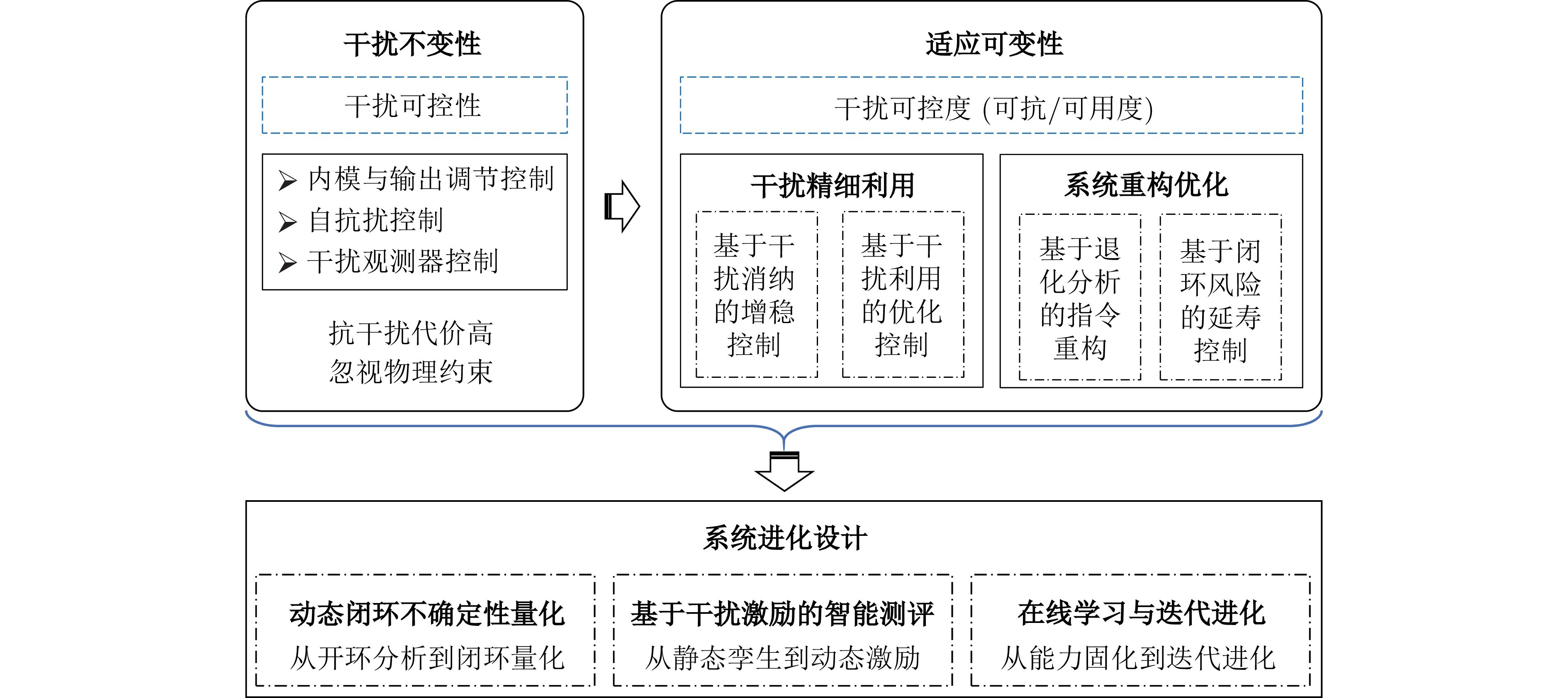
图1 从干扰不变性到适应可变性与系统进化设计
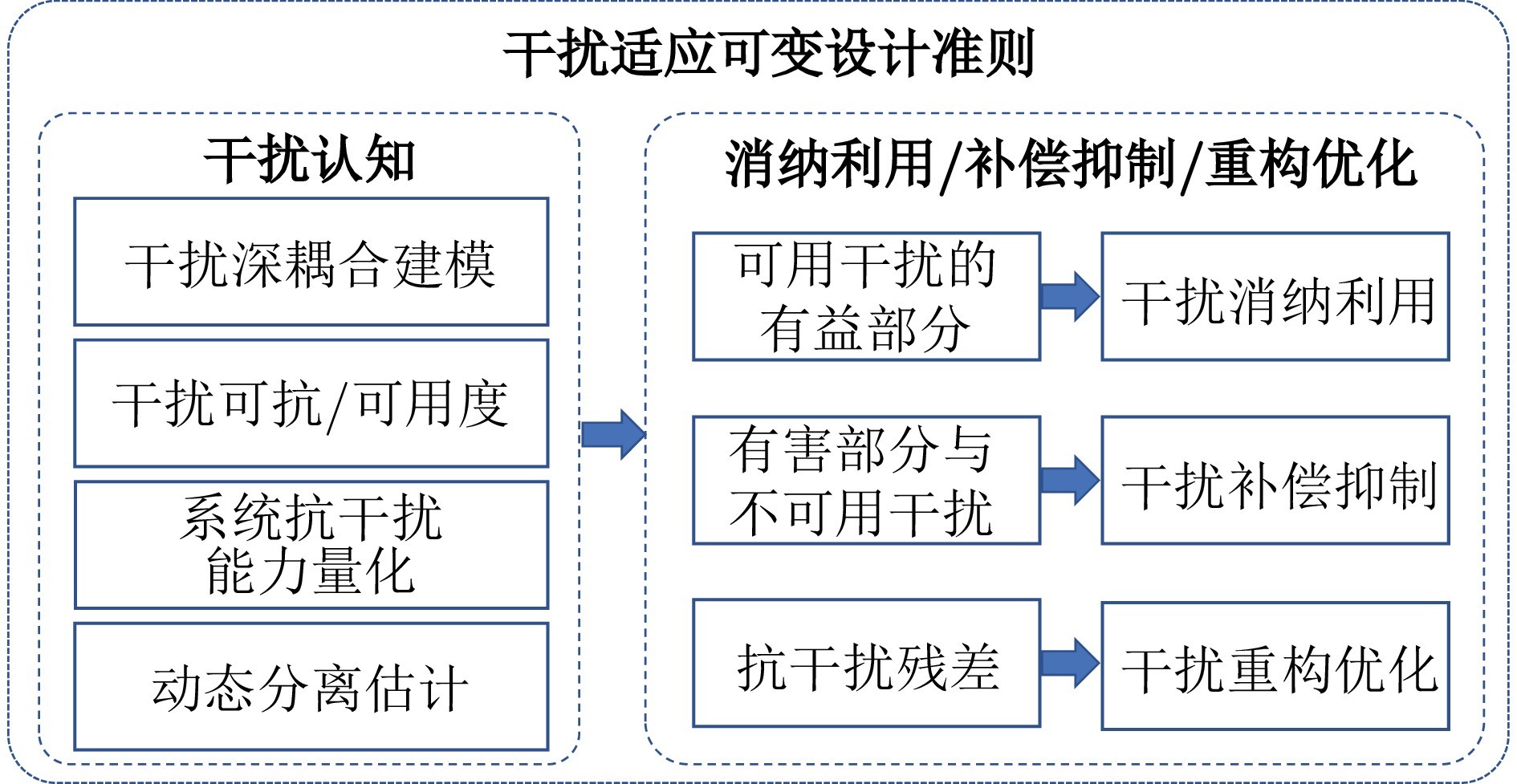
图2 干扰适应可变性准则的设计框架
尽管基于干扰不变性准则的抗干扰控制方法在许多领域得到了成功应用, 但仍面临控制能耗与执行机构损耗增加、引入额外测量噪声、难以满足系统物理约束等局限性. 本文在干扰不变性准则的基础上, 提出并总结干扰适应可变性准则和设计思想, 其主要实现途径包括: 干扰深耦合建模、干扰可抗/可用度量化、复合抗干扰控制、干扰主动和精细利用、基于抗扰能力量化的系统重构优化等. 干扰适应可变性准则破除了“理想环境、确定模式、预设任务”的局限性, 实现了“适应环境、抵御干扰、致胜天敌”的仿生智能. 在此基础上, 进一步提出系统进化设计、进化智能和智能系统工程的思想, 从“任务目标−干扰因素−系统资源”一体化的角度提高动态适配性. 干扰适应可变性准则突破了传统干扰不变性准则的藩篱, 实现了从“抗干扰”到“识干扰”、“用干扰”的干扰精细控制理论跨越, 为精细干扰控制理论和智能系统工程实践提供了新的理论支撑、研究视角和技术途径.
未来拟围绕精细、复合、智能三个理论特征继续深化研究. 具体地, 1)精细: 利用系统的先验信息和历史数据, 建立多源复合干扰的深耦合表征, 揭示干扰与系统状态、输入输出、其他干扰间的映射关系; 2)复合: 在干扰精细认知的基础上, 结合补偿抑制、消纳利用、重构优化等复合控制方式, 提高控制效果与任务品质; 3)智能: 结合人工智能技术[66−67], 通过干扰学习、干扰预测等方式, 实现智能系统的进化设计等. 将以干扰适应可变性准则进一步丰富空天仿生智能系统的科学内涵, 进而以仿生智能赋能无人系统, 提升无人系统在强对抗、强不确定性、高烈度等极端环境下的强自主、强适应、强生存能力.
作者简介
谢一嘉
北京航空航天大学自动化科学与电气工程学院博士后. 2017年获得南京理工大学学士学位, 2024年获得北京航空航天大学博士学位. 主要研究方向为抗干扰控制, 奇异摄动系统, 模型预测控制. E-mail: yjxiebuaa@126.com
李文硕
北京航空航天大学杭州创新研究院副研究员. 2012年获得山东大学学士学位, 2020年获得北京航空航天大学博士学位. 主要研究方向为自主导航, 抗干扰状态估计, 多源信息融合. E-mail: wslibuaa@126.com
朱玉凯
北京航空航天大学宇航学院副教授. 2020年获得北京航空航天大学博士学位. 主要研究方向为复合抗干扰控制及其应用, 航天器自主机动控制. E-mail: ykzhubuaa@126.com
崔洋洋
北京航空航天大学自动化科学与电气工程学院副教授. 2022年获得北京航空航天大学博士学位. 主要研究方向为干扰估计与补偿, 先进控制理论及其在机电系统、飞行器等领域的工程应用. E-mail: yangyangcui@buaa.edu.cn
郭雷
中国科学院院士, 北京航空航天大学自动化科学与电气工程学院教授. 1997年获得东南大学博士学位. 主要研究方向为无人系统仿生智能, 抗干扰控制理论及其应用, 仿生自主导航. 本文通信作者. E-mail: lguo@buaa.edu.cn
https://blog.sciencenet.cn/blog-3291369-1509776.html
上一篇:基于强化学习的流程工业智能决策研究与展望
下一篇:软件定义智能控制系统
