博文
软件定义智能控制系统
|
引用本文
柴天佑, 郑锐, 贾瑶, 黄新宇, 郑秀萍, 李智. 软件定义智能控制系统. 自动化学报, 2025, 51(10): 2232−2244 doi: 10.16383/j.aas.c250274
Chai Tian-You, Zheng Rui, Jia Yao, Huang Xin-Yu, Zheng Xiu-Ping, Li Zhi. Software-defined intelligent control system. Acta Automatica Sinica, 2025, 51(10): 2232−2244 doi: 10.16383/j.aas.c250274
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250274
关键词
深度学习,强化学习,数字孪生,可编程逻辑控制器,软件定义智能控制
摘要
针对可编程逻辑控制器(PLC)和虚拟PLC的PID难以优化整定的难题, 将建模、控制、优化和深度学习与强化学习相结合, 提出无模型PID在线自优化整定算法. 将工业云及边缘计算、软件定义实时及可靠保障机制的双通道通信架构与所提出的PID整定算法相结合, 提出云端协同的软件定义智能控制系统. 云为基于云服务器的智能控制软件开发平台;端为基于工业服务器的智能控制软件. 智能控制软件包括虚拟PLC PID、PID预优化整定和控制过程数字孪生以及在线自优化整定、自适应切换机制. 采用研制的软件定义智能控制系统研究实验平台, 进行所提出的控制系统与国外先进PLC和工业PC的无模型整定软件PID控制系统的仿真与物理对比实验. 实验结果表明本文的软件定义智能控制系统可进行控制器参数自优化整定, 控制性能显著优于国外无模型整定软件的PID控制系统.
文章导读
目前, 工业界大多采用基于单片机技术的可编程逻辑控制器(Programmable logic controller, PLC)控制系统实现工业过程或制造装备的闭环控制、开环控制、逻辑控制与监控功能. 上述工业控制系统是基于专用计算机的控制系统, 硬件和软件组件结合在一起, 控制、协调和监督工业被控对象[1]. 由于硬件扩充成本高昂且通常难以实现, 无法支持工业大数据驱动的工业智能算法等资源密集型任务[2−3]、计算机技术与通信技术的发展, 基于虚拟PLC (Virtual PLC, vPLC)软件定义控制系统受到学术界和工业界的广泛关注[3−4].
随着计算机技术的发展, 如产业界的倍福自动化和东土科技公司相继推出软件定义PLC控制系统产品, 倍福自动化采用计算机、东土科技采用工业服务器. 软件定义控制系统将PLC和监控计算机的功能在一台通用计算机或服务器实现. 该软件定义的PLC将逻辑控制功能与I/O组件解耦, 同时通过实时虚拟机管理程序实现PLC逻辑的虚拟化, 并提供强的算力和可扩展功能[4]. 倍福自动化定义控制系统广泛应用于制造装备如风力发电装备, 实现监控与控制一体化, 但实时操作系统与实时数据库不开源.
随着云计算、云服务和移动互联网的发展, 文献[5]将工业自动化作为一种新的云服务, 重点研究基于云的自动化架构, 提出控制器的虚拟化可减少硬件成本和相关的劳动成本. 文献[6]指出随着云计算和控制理论的发展出现一种新的云控制系统模式, 并对2012年以来提出的云控制系统进行综述. 由于云控制器的控制信号作用于工业现场的被控对象, 被控对象的输出引入云控制器, 需要无线传输装置, 因此, 难以保证控制系统的动态性能和安全.
工业互联网的端边云技术与边缘计算的发展促使边缘计算在工业生产的设备层面开展智能服务, 优化通信、计算和存储资源的研究[7]. 位于云−工业云和端−工业生产之间的边部署边缘计算系统开展虚拟PLC的研究受到学术界的广泛关注. 文献[3]概述在商用现有服务器中运行的虚拟PLC概念, 指出虚拟PLC在由虚拟机监控程序管理的虚拟机内运行, 对虚拟PLC进行实现与评估. 文献[8]提出容器化虚拟技术能够满足软实时需求, 可应用于工业自动化领域. 工业PLC的大型制造商开始推广在边缘计算平台中部署容器化虚拟PLC.
国际标准IEC (International Electrotechnical Commission) 61499提出后, 支持可移植性、互操作性和可配置性的工业自动化系统的分布式架构设计受到广泛关注[9−10]. 工业自动化系统的架构正由传统的ISA (International Society ofAutomation)-95金字塔模型向“工业云−边缘计算”的双层架构演进. 这一新型架构对工业软件和工业通信技术提出新要求[11−12].
文献[13]指出, 通过对控制系统在工业革命中的作用和发展状况的分析可以看出, 基于控制误差的比例、积分和微分的PID (Proportional-Integral-Derivative) 控制模型是在总结人的反馈、保持和预测智能行为基础上发明的. 今天, 工业装备和运动体, 包括工业生产过程、机器人、轨道交通、汽车、海洋运载工具的控制约95%以上采用PID控制器[14−17]. 国际自动控制联合会(International Federation of Automatic Control, IFAC)的行业工作组对各种控制方法的影响力进行调查, 结果显示PID控制器影响力最强, 高影响率达100%[15]. 虽然PID控制算法没有改变, 但实现PID的控制系统随着机械、模拟电子、计算机技术的发展而发生变化: 第一次工业革命, 工业控制系统为机械驱动的比例控制系统; 第二次工业革命, 发展为模拟电子驱动的PID控制系统; 第三次工业革命, 发展为专用计算机驱动的PLC控制系统. 今天, 工业云、工业边缘计算和软件技术的发展推动了软件定义控制系统的发展.
无论是PLC还是软件定义控制系统, 都将PID作为主要控制技术. 这是因为PID控制器只需可实时获取的跟踪误差, 无需被控对象模型, 便于产品化工程推广. 其控制性能取决于PID的比例、积分和微分参数. 因此, PID参数整定的研究受到学术界与产业界的广泛关注. PID参数整定分为基于被控对象模型和无模型整定方法[18−28]. 目前, 在工业界广泛应用无模型PID整定软件. 西门子PLC和倍福工业个人计算机(Personal computer, PC)的PID整定软件分别基于无模型ZN (Ziegler-Nichols)整定法[29]和改进的继电反馈法[30]. 虽然上述无模型PID整定软件无需被控对象模型、快速求取PID参数, 但需有经验的工程技术人员调试才能获得较满意的结果. 当被控对象动态特性变化时, 需要重新优化控制系统参数, 需闭环控制实验. 由于实时优化方法在数值优化函数的搜索空间可能给出较差的结果, 为保证控制系统的安全可靠运行, 不允许在线优化控制系统参数, 只能依靠人工离线调整与试凑控制系统参数, 无法获得最优的控制系统参数. 文献[31−32]将控制过程数字孪生与强化学习相结合, 工业互联网的端边云技术与计算机控制系统相结合, 提出端边云协同的PID智能整定方法. 该方法需增加边−边缘计算机运行控制器参数自优化自学习算法和云−AI计算平台运行控制过程数字孪生模型, 从而形成与端−PLC控制系统协同运行的云边协同的控制器参数自学习自优化系统. 该方法在数字空间实现控制器参数的自学习自优化, 优化的控制器参数自动开环自校正实际运行的端−控制系统. 虽然不影响端−控制系统的可靠运行, 但云−端之间长距离的无线传输影响系统的安全可靠运行. 软件定义的控制系统、“工业云−边缘计算”、控制器参数自优化智能算法相结合实现控制系统智能化成为未来发展方向.
本文的主要贡献如下:
1)针对PLC和软件定义控制系统的PID无法优化整定的难题, 提出由PID预优化整定、自优化整定、自适应切换机制组成的无模型PID在线自优化整定算法.
2)采用云端协同的控制系统架构, 提出由云−基于工业云的智能控制软件开发平台、端−基于工业服务器的智能控制软件组成的软件定义智能控制系统.
3)将软件定义实时及可靠保障机制的双通道通信与所提出的PID整定算法相结合, 研制由虚拟PLC PID、PID预优化整定、控制过程数字孪生、在线自优化整定和自适应切换机制组成的智能控制软件.
4)研制由软件定义智能控制系统、国外先进的PLC与工业PC、仿真系统与换热装置组成的研究实验平台, 进行与无模型PID整定软件的国外先进控制系统的仿真与物理对比实验. 实验结果表明, 软件定义智能控制系统的PID控制性能显著优于国外控制系统的PID控制.
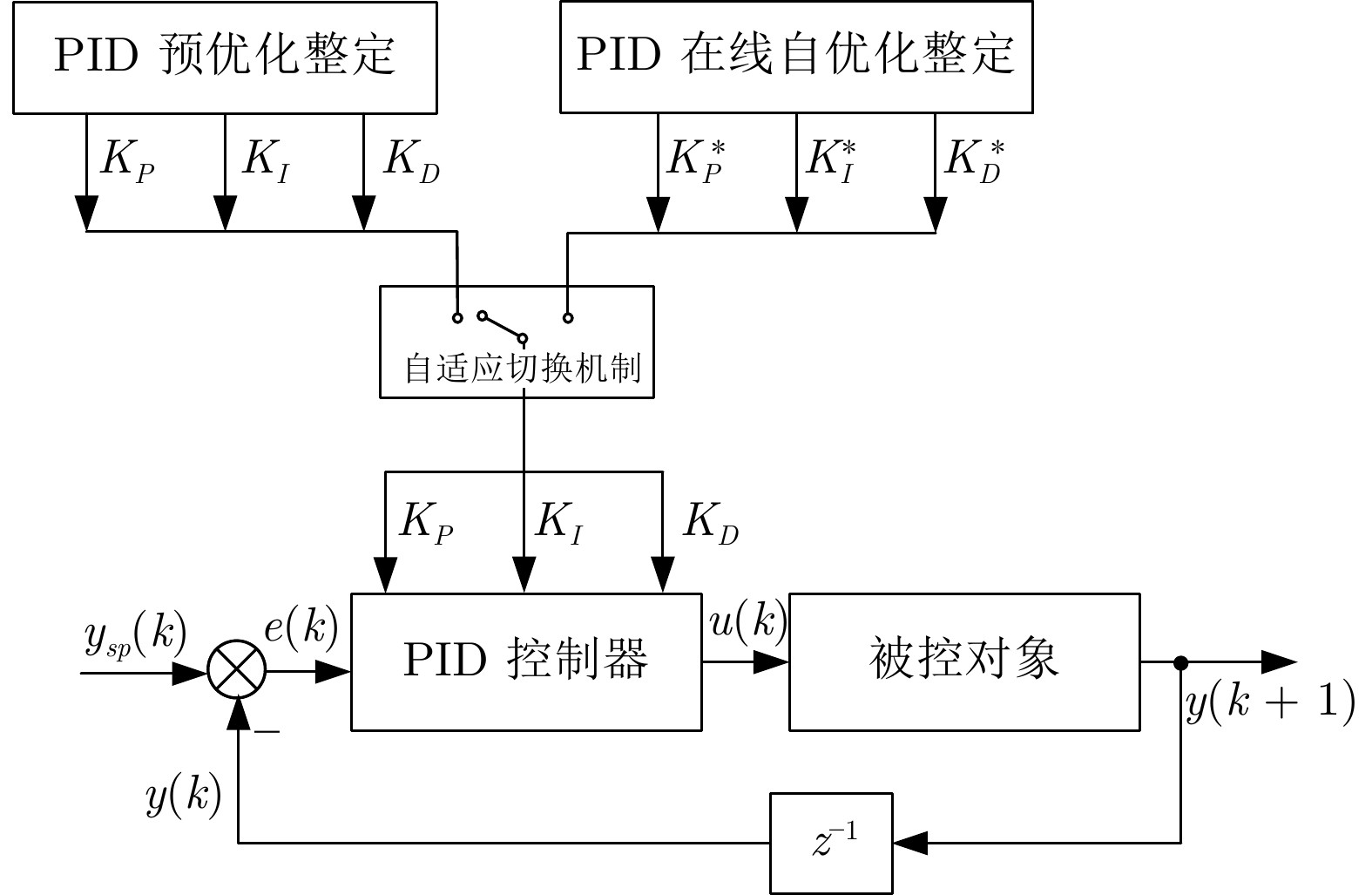
图1 无模型PID在线自优化整定算法结构
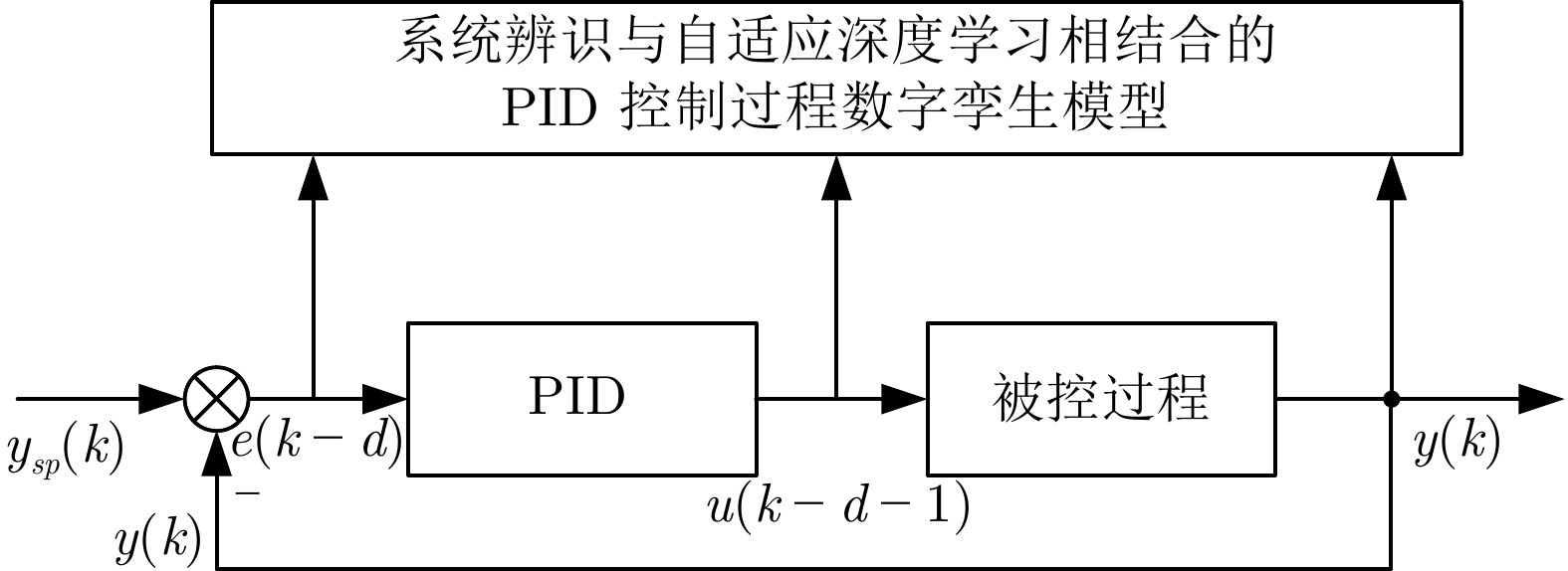
图2 PID控制过程与数字孪生模型
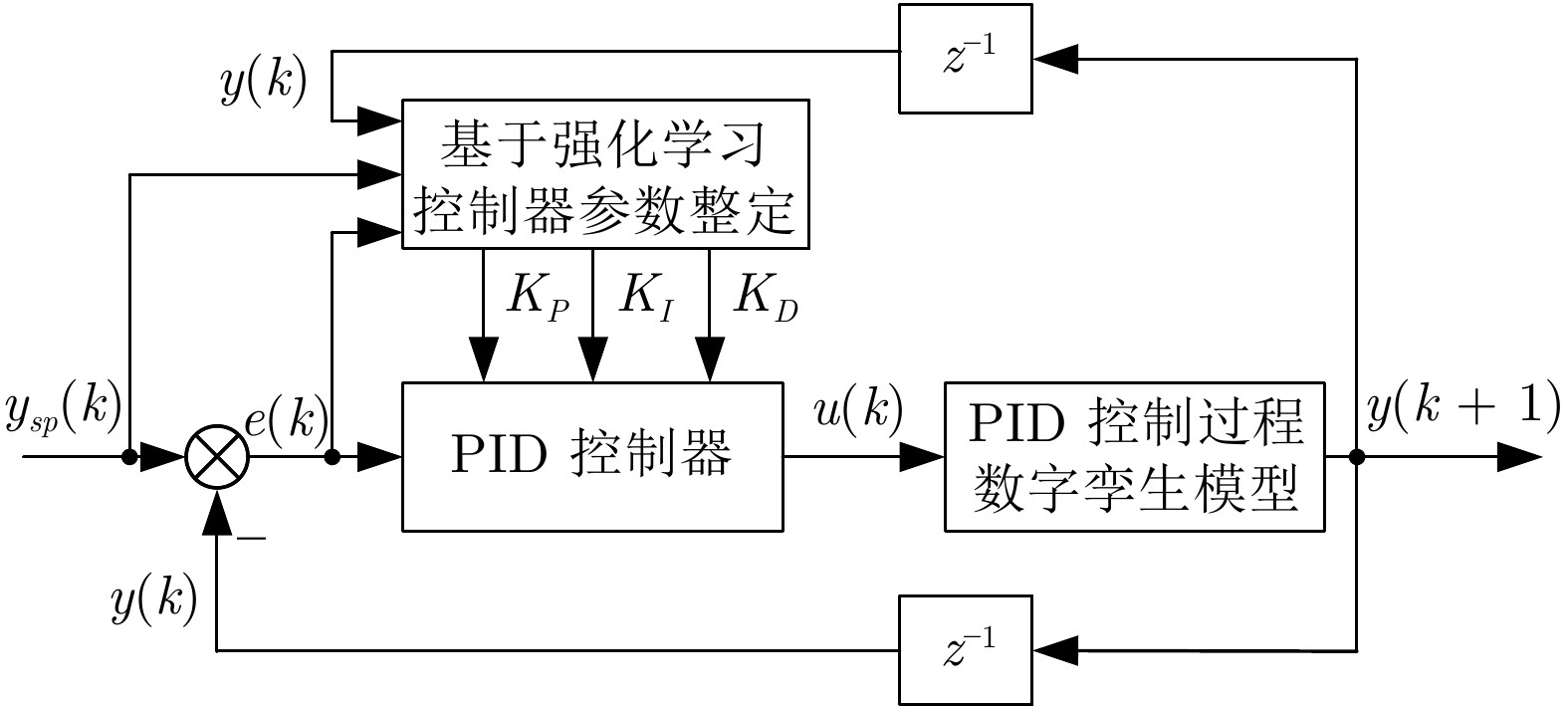
图3 PID控制器参数整定结构
本文提出的无模型PID在线自优化整定算法由PID预优化整定、在线自优化整定和自适应切换机制组成. 提出的软件定义智能控制系统采用云端协同的系统架构, 由基于工业云的智能控制软件开发平台和基于工业服务器的智能控制软件组成. 智能控制软件由基于虚拟PLC PID、PID预优化整定软件、控制过程数字孪生、在线自优化整定与自适应切换机制组成. 采用研制的软件定义智能控制系统研究实验平台, 通过本文、西门子与倍福无模型整定软件的PID控制系统仿真与换热系统对比实验, 表明本文软件定义智能控制系统性能明显优于西门子PLC和倍福工业PC的整定软件PID控制系统, 为实现软件定义控制系统智能化开辟了新路径.
作者简介
柴天佑
中国工程院院士, 东北大学教授, IEEE Fellow, IFAC Fellow, 欧亚科学院院士. 主要研究方向为自适应控制, 智能解耦控制, 流程工业综合自动化理论、方法与技术. 本文通信作者. E-mail: tychai@mail.neu.edu.cn
郑锐
东北大学流程工业综合自动化全国重点实验室博士研究生. 主要研究方向为软件定义智能控制技术, 决策与控制一体化智能系统技术. E-mail: 2010263@stu.neu.edu.cn
贾瑶
东北大学流程工业综合自动化全国重点实验室副教授. 主要研究方向为智能运行控制技术, 智能控制技术, 智能检测技术, 决策与控制一体化智能系统技术. E-mail: jiayao@mail.neu.edu.cn
黄新宇
东北大学流程工业综合自动化全国重点实验室讲师. 主要研究方向为软件定义控制, 决策与控制一体化软件平台. E-mail: huangxinyu@mail.neu.edu.cn
郑秀萍
东北大学流程工业综合自动化全国重点实验室教授. 主要研究方向为流程工业智能管控系统. E-mail: xiupingzheng@mail.neu.edu.cn
李智
东北大学流程工业综合自动化全国重点实验室教授. 主要研究方向为智能控制系统, 智能机器人. E-mail: lizhi1@mail.neu.edu.cn
https://blog.sciencenet.cn/blog-3291369-1510229.html
上一篇:精细抗干扰控制——从干扰不变性到适应可变性
下一篇:基于无模型策略梯度强化学习的未知随机系统最优控制
