博文
旋转导向钻井工具系统实时测量的智能粒子滤波方法
|
引用本文
盛立, 刘一凡, 高明, 周东华. 旋转导向钻井工具系统实时测量的智能粒子滤波方法. 自动化学报, 2025, 51(10): 2313−2323 doi: 10.16383/j.aas.c250136
Sheng Li, Liu Yi-Fan, Gao Ming, Zhou Dong-Hua. Intelligent particle filter for real-time measurement of rotary steerable drilling tool system. Acta Automatica Sinica, 2025, 51(10): 2313−2323 doi: 10.16383/j.aas.c250136
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250136
关键词
智能粒子滤波,旋转导向钻井工具系统,实时测量,深度学习算法,未知噪声协方差矩阵
摘要
针对旋转导向钻井工具系统中工具面角的实时测量问题, 提出一种基于深度学习的智能粒子滤波算法. 首先, 针对粒子滤波中的粒子短缺与退化问题, 建立条件生成对抗网络(CGAN)引导的粒子选择机制. 在该机制中, 生成器网络通过对抗训练优化采样分布, 生成高质量粒子集; 判别器则评估生成粒子在真实后验分布中的概率值, 指导粒子权重计算. 其次, 针对井下复杂工况中存在的噪声协方差矩阵未知且时变问题, 设计基于深度残差网络(ResNet)的协方差矩阵估计器. 该模块与CGAN引导的粒子滤波以端到端的方式集成, 形成闭环优化系统. ResNet模块得益于粒子滤波算法中的模型信息, 并为粒子滤波提供协方差矩阵的估计. 最后, 在旋转导向钻井工具平台上进行实验. 结果表明所提算法能够有效解决工具面角的实时测量问题, 与已有算法相比具有更高的精度.
文章导读
旋转导向钻井工具系统(Rotary steerable drilling tool system, RSDTS)是油气勘探开发领域的重要设备, 主要负责驱动钻头沿着给定的工具面角钻进[1]. 工具面角是表征钻头钻进方向的重要参数, 其测量精度决定RSDTS的整体性能. 传统方法主要采用加速度计等传感器静态测量工具面角[2], 实时性不佳. 为此, 文献[3]建立RSDTS的数学模型, 将工具面角的实时测量转化为非线性系统的滤波问题. 由于井下环境复杂多变, RSDTS的滤波具有一定挑战性[4], 主要难点集中于以下两方面: 1) 一般非线性滤波方法如扩展卡尔曼滤波(Extended Kalman filter, EKF)和无迹卡尔曼滤波(Unscented Kalman filter, UKF) 在处理RSDTS模型中的非线性时存在固有局限性[5]; 2) 实际钻井过程中RSDTS测量噪声和过程噪声的噪声协方差矩阵未知且时变.
粒子滤波(Particle filter, PF)是一种常用的非线性滤波算法[6], 其核心思想在于通过融合重要性采样理论与基于离散随机测度的概率分布近似表征方法, 实现相关概率分布的递归计算. 然而, 传统粒子滤波算法存在粒子短缺与退化问题, 导致粒子难以描述真实分布. 该现象是由粒子状态选择不充分造成的, 其解决的关键在于设计合适的重要性采样分布. 早期的解决方案主要依赖于重采样策略[7], 即通过舍弃低权重粒子并保留高权重粒子来优化粒子集. 文献[8]首次将遗传算法引入粒子滤波, 通过交叉操作引导低似然粒子向高似然区域迁移; 同时, 利用变异操作促使粒子随机向低似然区域探索, 以增加粒子多样性. 在基于启发式算法的改进粒子滤波中, 粒子的似然值被视为目标函数, 通过相应的寻优机制使粒子向高似然区域聚集[9].
随着人工智能技术的发展, 深度学习模型被引入到滤波领域[10], 其强大的学习能力有助于解决传统滤波算法的局限性[11]. 文献[12]提出一种基于Transformer的卡尔曼滤波器, 通过捕捉数据的时序特征来实现时变信号的精准预测, 并采用最大期望(Expectation-maximization, EM)算法估计卡尔曼滤波的关键参数. 文献[13]提出一种深度粒子滤波算法, 在重采样前引入反向传播神经网络以增强粒子多样性, 并将其应用于滚动轴承的剩余使用寿命预测. 文献[14]利用条件变分自编码器(Conditional variational autoencoder, CVAE)生成模型引导粒子的状态选择, 学习数据的潜在分布, 并生成与分布相符的新数据. 在序贯采样策略框架下, 该方法能够从理论上最优的真实后验分布中采样. 然而, 生成模型本质上是一个黑箱模型, 难以直接从中获取真实的概率值, 这使得粒子权重的直接计算较为困难. 如何有效利用生成模型引导粒子滤波, 仍然是当前亟待解决的重要科学问题.
当噪声协方差矩阵未知时, 粒子滤波的应用面临显著挑战. 对于卡尔曼滤波器而言, 通过引入变分贝叶斯推断(Variational Bayesian inference, VB)、EM等参数推断算法, 能够同时对状态和噪声协方差矩阵进行联合估计[15−16]. 然而, 粒子滤波的实质是贝叶斯滤波的一种非参数实现, 上述参数化方法难以应用于粒子滤波框架. 在测量噪声协方差未知的情况下, 文献[17] 将VB算法与PF算法结合, 并推导测量噪声协方差的更新公式. 由于粒子滤波依赖于采样过程, 该方法在处理粒子短缺与退化问题时容易出现较大偏差, 在理论上并非行之有效的解决方案. 当过程噪声协方差矩阵未知时, 粒子的状态确定本身十分困难, 而粒子的权重计算则更为复杂. 文献[18]提出将卷积神经网络(Convolutional neural network, CNN)与UKF结合, 利用CNN学习噪声协方差矩阵, 并以端到端的方式实现两者协同. 其中, CNN受益于UKF提供的模型信息, 而UKF 则借助CNN的学习能力提升估计性能. 类似地, 文献[19]提出一种基于深度学习的卡尔曼滤波器, 通过引入两个长短期记忆神经网络自适应调节测量噪声协方差, 实现车辆侧偏角的高精度估计. 针对过程噪声时变下的纯方位跟踪问题, 文献[20]提出基于Swin Transformer的自适应卡尔曼滤波器. 使用Swin Transformer模型来捕获过程噪声统计特性, 进而学习目标位移和速度间的统计关系. 需要指出的是, 尽管深度神经网络与粒子滤波的结合展现出巨大潜力, 但这一领域仍处于探索阶段, 许多关键问题尚未解决. 例如, 如何设计高效的网络结构以准确捕捉噪声特性, 以及如何将神经网络模型与粒子滤波进行集成, 都是当前研究的难点[21].
综合上述分析, 本文提出一种RSDTS的智能滤波方法, 主要贡献包括:
1)针对RSDTS工具面角的实时测量问题, 提出一种智能粒子滤波算法, 有效解决了系统中的强非线性及噪声协方差未知且时变的问题.
2)提出条件生成对抗网络(Conditional generative adversarial network, CGAN)引导的粒子选择机制. 其中生成器拟合真实后验分布以实现粒子采样, 判别器指导粒子权重计算, 显著缓解了粒子短缺与退化问题, 提升了滤波性能.
3)设计残差神经网络(Residual network, ResNet)与粒子滤波的融合算法, ResNet利用粒子滤波的模型信息估计噪声协方差矩阵, 粒子滤波则借助ResNet的学习能力实现工具面角的测量, 有效应对了井下噪声协方差矩阵未知且时变的复杂工况.
本文提出的方法不仅为工具面角的实时测量提供新的解决方案, 还为粒子滤波与深度学习技术的结合探索了新的研究方向.
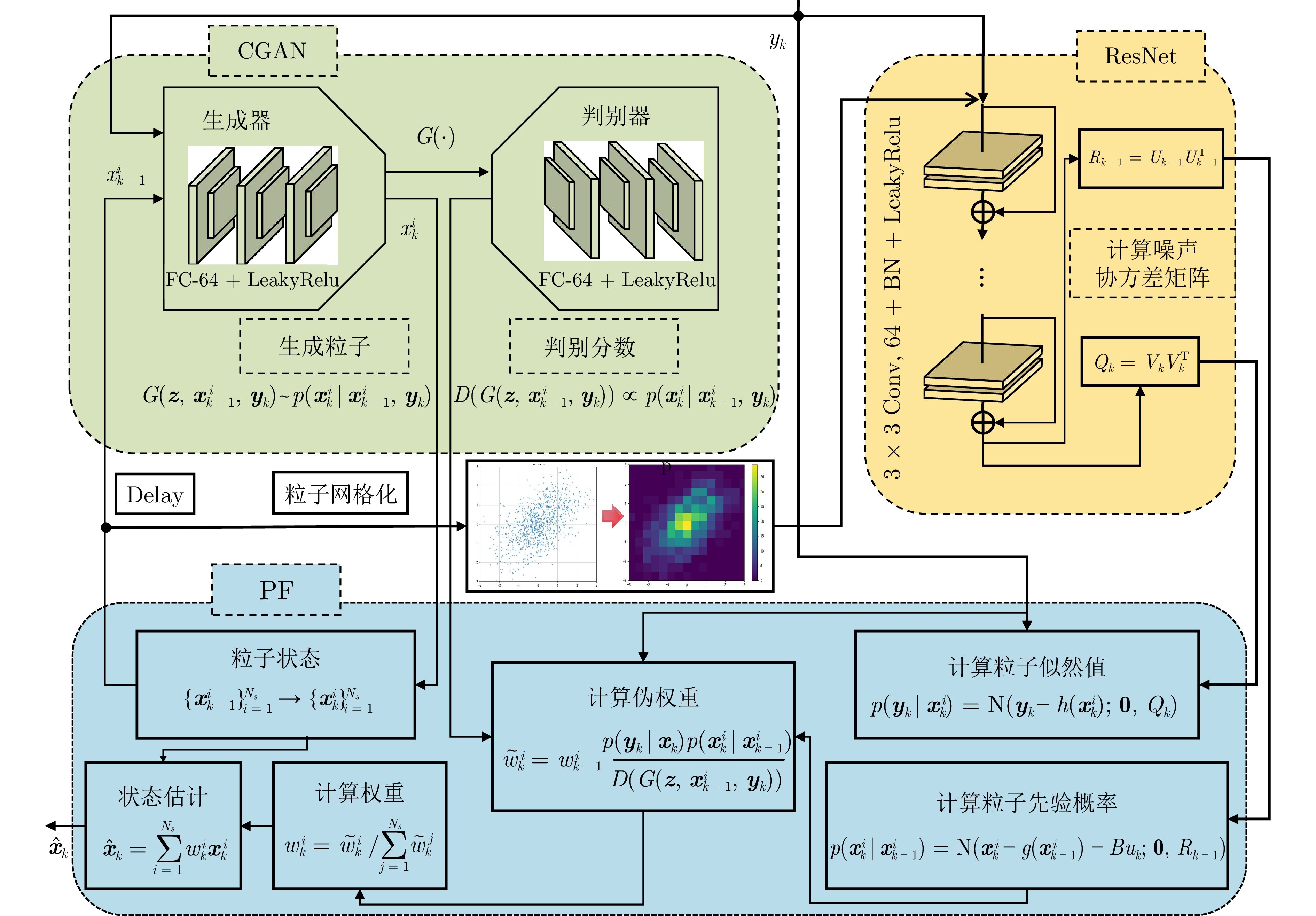
图1 ResCGAN-PF算法图示
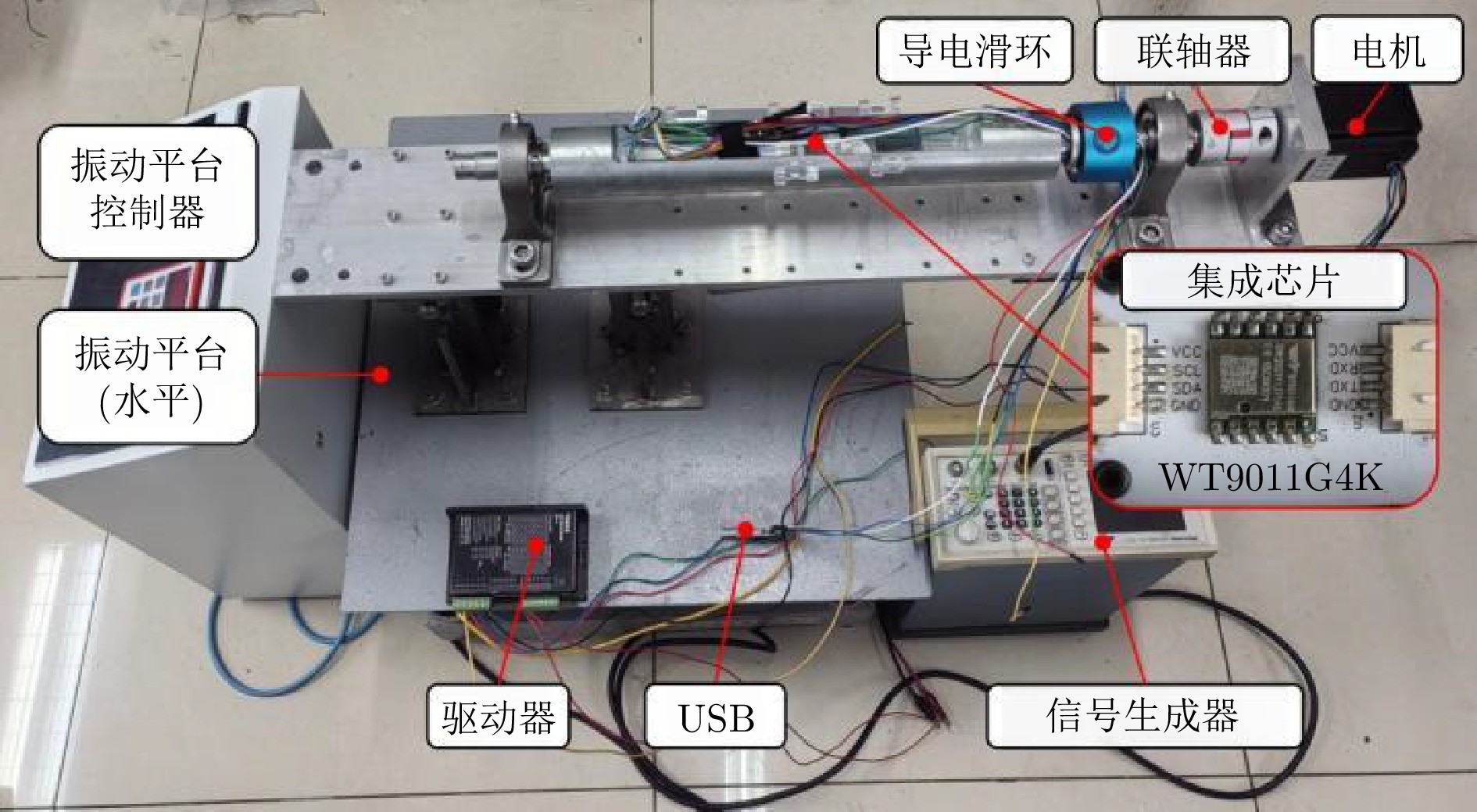
图2 RSDTS实验平台
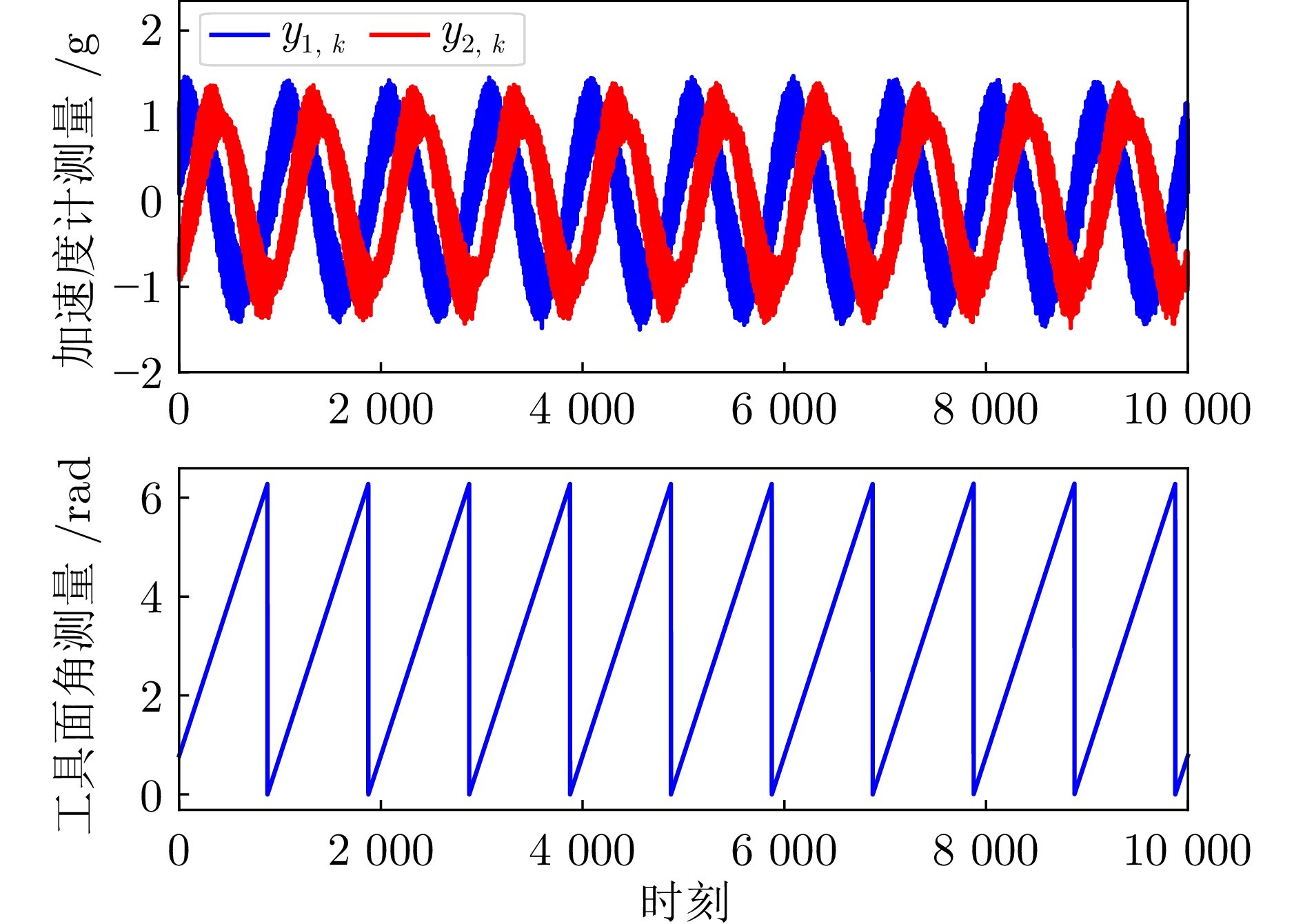
图3 RSDTS数据集
针对旋转导向钻井工具系统的工具面角实时测量难题, 本文提出基于深度学习的智能粒子滤波算法. 通过构建条件生成对抗网络引导的粒子选择机制和深度残差网络协方差矩阵估计器, 形成端到端的闭环优化系统, 有效解决了粒子退化和噪声协方差时变等关键科学问题. 实验结果表明, 所提算法在粒子状态选择和工具面角估计方面均展现出显著优势, 相比同类算法具有更高的估计精度. 本文下一步工作将研究奇异系统的智能粒子滤波算法, 进而解决RSDTS中的故障检测与估计等问题.
作者简介
盛立
中国石油大学(华东)控制科学与工程学院教授. 2010年获得江南大学博士学位. 主要研究方向为随机控制与滤波, 网络化控制系统以及现代系统的故障检测与诊断. E-mail: shengli@upc.edu.cn
刘一凡
中国石油大学(华东)控制科学与工程学院博士研究生. 主要研究方向为随机系统的滤波与故障诊断. E-mail: b24050007@s.upc.edu.cn
高明
中国石油大学(华东)控制科学与工程学院教授. 2009年获得江南大学博士学位. 主要研究方向为网络化控制系统的鲁棒控制与故障诊断. E-mail: gaoming@upc.edu.cn
周东华
东南大学自动化学院教授. 1990年获得上海交通大学博士学位. 主要研究方向为动态系统的故障诊断与容错控制, 故障预测与最优维护技术. 本文通信作者. E-mail: zdh@tsinghua.edu.cn
https://blog.sciencenet.cn/blog-3291369-1511576.html
上一篇:带有输入时滞的非线性系统基于学习的输出反馈控制
下一篇:面向电力系统快速频率响应的数据与模型驱动预测控制