博文
面向电力系统快速频率响应的数据与模型驱动预测控制
|
引用本文
吴卓睿, 张萌, 管晓宏. 面向电力系统快速频率响应的数据与模型驱动预测控制. 自动化学报, 2025, 51(10): 2337−2346 doi: 10.16383/j.aas.c250261
Wu Zhuo-Rui, Zhang Meng, Guan Xiao-Hong. Data and model-driven predictive control for fast frequency response in power systems. Acta Automatica Sinica, 2025, 51(10): 2337−2346 doi: 10.16383/j.aas.c250261
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250261
关键词
快速频率控制,变流器资源,模型预测控制,参考调节器,深度学习
摘要
维持频率稳定是电力系统控制的一个重要目标. 然而, 高渗透率新能源可能导致频繁的功率波动, 对系统频率调节造成不利影响. 为解决这一问题, 通常需要快速调节变流器资源的功率输出, 响应系统频率波动以实现快速频率控制. 针对电力系统快速频率控制, 提出一种数据与模型驱动的预测控制方法. 首先, 设计数据驱动的扰动观测器以估计负荷变化与新能源波动等系统扰动. 为优化控制性能, 利用基于神经网络设计的参考调节器为模型预测控制器提供虚拟参考. 通过学习长预测时域模型预测控制器, 参考调节器能够提升短预测时域控制器性能, 因而降低了所需的计算时间. 最终, 仿真对比结果表明所提方法能够有效提高频率控制性能.
文章导读
在双碳目标的指引下, 我国正加快规划建设新型电力系统[1−3]. 在这一进程中, 新能源、新型储能系统与高压直流输电等丰富的变流器资源(Inverter- based resource, IBR)广泛接入电网, 使得电力系统电源由交流同步发电机向电力电子设备转变[4]. 变流器在物理结构和特性上与传统同步发电机相差甚远, 极大地影响了电力系统运行机理. 特别是, 变流器缺乏物理惯性和阻尼, 在电力系统功率失衡的情况下, 会导致更严重的频率波动与振荡[5−6]. 另一方面, 新能源系统和电动汽车的接入给电力系统引入随机性与波动性[7], 加剧系统频率的波动, 甚至会导致系统崩溃, 对电力系统频率调节提出更高的要求[8].
尽管IBR本身不具有物理惯性, 但其动态特性主要由人为控制算法主导, 能够实施更加灵活的控制律以参与系统频率调节[9]. 受益于电力电子技术的发展[10], 与传统同步发电机相比, IBR能够快速高效调节其输出功率, 使得利用IBR进行系统频率调节成为提高电力系统可靠性的有效途径. 目前, 最常见的两种频率控制方法为下垂控制与虚拟惯性控制[11]. 其中, 下垂控制调节IBR输出功率正比于频率偏差[12], 而虚拟惯性控制则通过模仿传统同步发电机的摆动动态, 提供额外的惯性与阻尼[13]. 上述方法能够有效控制IBR响应系统频率变化, 提升频率稳定性, 但无法将系统频率恢复至额定值.
传统电力系统频率的维持主要依赖于自动发电控制. 近年来形成集中式[14]、分布式[15]、分层控制[16]等自动发电控制方法. 虽然这些方法在一定程度上能够有效恢复系统频率, 但主要针对传统同步发电机, 并需要一定的通信资源, 限制了其频率调节速度, 难以充分发挥IBR的功率调节性能[17].
为充分发挥IBR的调节能力, 快速频率控制方法得到广泛的研究[18]. 在这一研究领域中, 模型预测控制(Model predictive control, MPC)作为一种基于优化的控制方法[19], 考虑操作约束的同时根据状态空间模型对未来状态进行预测来计算最优控制输入, 能够有效应用于频率控制场景中. 基于MPC方法, 文献[20] 为高压直流输电设备设计一种集中式控制框架, 但该方法依赖于快速可靠的通信以获得全局状态, 控制性能会受到通信延迟和故障的影响. 文献[21] 提出一种去中心化的控制框架, 但其仍需要系统完整的拓扑信息以计算母线灵敏度因数. 文献[22] 利用母线上的频率变化率估计系统扰动, 并建立去中心化MPC方法, 但该扰动估计方法依赖于获取准确的系统惯性和频率变化率. 若能获得准确的系统模型参数, 上述方法均能有效控制IBR实现快速调频. 然而, 实际很难获得精确的系统模型[23], 给系统扰动估计和MPC的实施带来困难.
另一方面, 在电力系统频率控制场景下, MPC可能需要较长的预测时域求解最优控制输入以恢复系统频率. 尽管可以通过设置状态约束或终端约束限制最终的频率偏差在容许范围内, 但在预期状态与当前状态相差过大时, MPC同样需要较长预测时域调节状态到达终端域[24]. 因此, 为获得较小的频率偏差, 通常需要设置较长的预测时域, 增加控制器计算成本. 为解决这一问题, 一些文献为MPC设计参考调节器, 设置人工参考点与终端域并逐步更新, 最终实现控制目标, 在一定程度上降低所需预测时域[24−25]. 但针对频率控制问题设置人为的状态约束或终端约束, 不仅限制了控制策略的灵活性还会增加一定的计算成本[26].
针对以上问题, 本文设计基于深度学习的参考调节器以提升MPC在快速频率控制问题中的控制性能. 首先, 为摆脱对精确模型的依赖, 本文设计数据驱动的扰动观测器, 以估计系统中由负荷或新能源出力变化造成的扰动. 接着, 本文基于深度学习方法设计参考调节器以调节MPC参考, 借此提高短预测时域控制器性能. 为优化参考调节器权重, 本文提出的训练算法通过对比基于参考调节器的短预测时域MPC与长预测时域参考MPC的预测轨迹, 形成损失函数更新参考调节器, 使得基于参考调节器的短预测时域MPC能够获得接近长预测时域MPC的控制性能. 通过上述方法, 有效地降低了MPC所需的计算时间.
本文其余部分安排如下: 第1节介绍本文的问题描述; 第2节设计数据驱动的扰动观测器与基于MPC的快速频率控制方法, 并在此基础上设计基于深度学习的参考调节器; 第3节针对本文所提方法进行仿真测试; 第4节总结本文的主要结果, 并提出未来的研究方向.
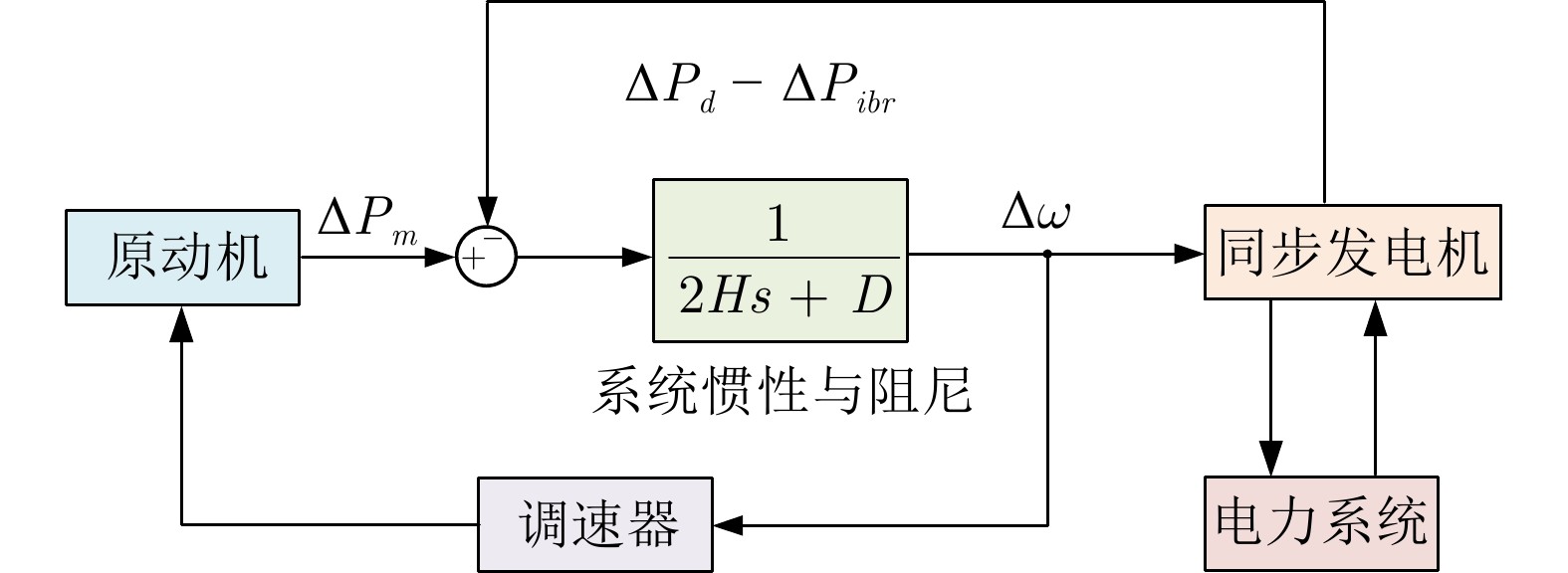
图1 系统频率响应模型
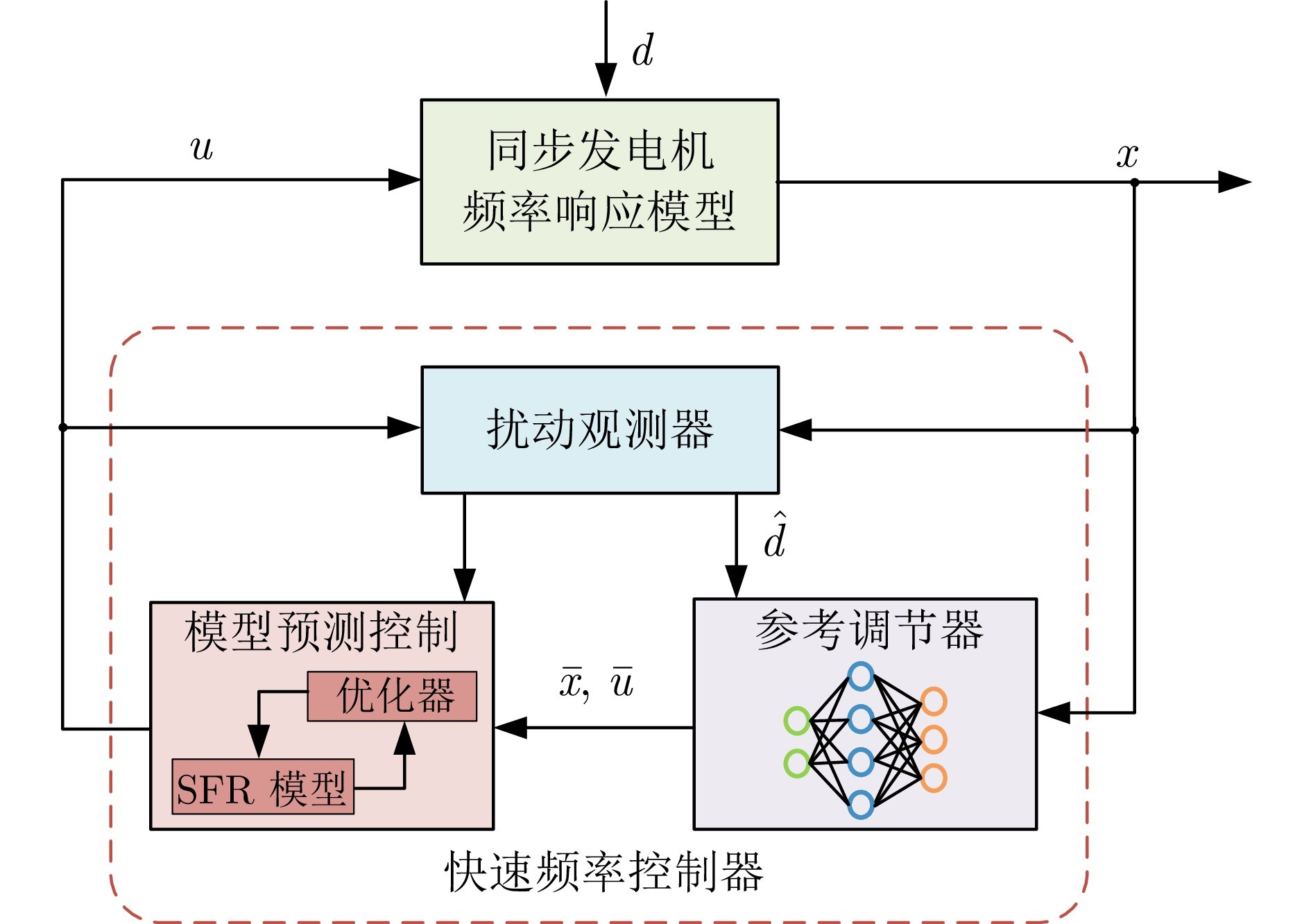
图2 快速频率控制框图
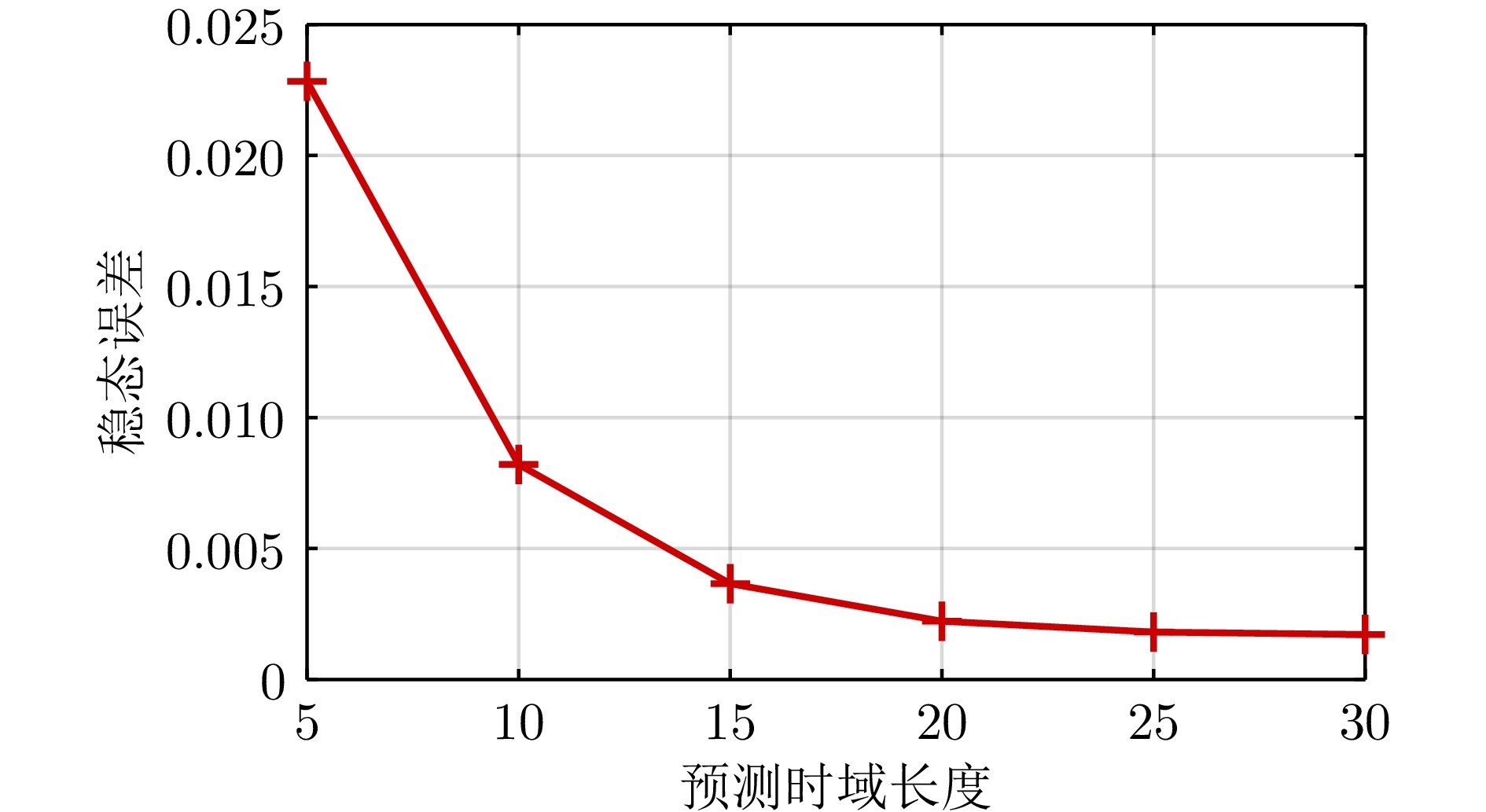
图3 不同预测时域下系统频率稳态误差
本文提出面向电力系统快速频率控制的数据与模型驱动的预测控制方法. 所提方法有效地减小了系统频率偏差与稳态频率误差, 并降低了模型预测控制器所需计算时间. 该控制策略的有效性主要依赖于数据驱动的扰动观测器与参考调节器方法. 基于数据驱动扰动观测器, 本方法实现在不依赖系统模型参数的情况下对系统扰动的估计. 另外, 本文设计参考调节器训练方法对调节器权重进行优化, 使其提供有效的虚拟参考调节模型预测控制器. 最终以短预测时域的模型预测控制器实现接近长预测时域控制器的控制效果. 通过结合基于深度学习的参考调节器与模型预测控制, 本方法提升控制器性能的同时保留模型预测控制在处理约束上的优势. 未来的研究将考虑变流器资源功率调节动态对系统的影响与自适应扰动观测器设计以进一步提升所提方法的频率控制性能.
作者简介
吴卓睿
西安交通大学网络空间安全学院博士研究生. 2021年获得西安交通大学学士学位. 主要研究方向为数据驱动电力系统控制. E-mail: wzr445576941@stu.xjtu.edu.cn
张萌
西安交通大学网络空间安全学院教授. 2018年获得浙江大学博士学位. 主要研究方向为电力系统控制、优化与安全. 本文通信作者. E-mail: mengzhang2009@xjtu.edu.cn
管晓宏
中国科学院院士, 西安交通大学网络空间安全学院教授. 1993年获得康涅狄格大学博士学位. 主要研究方向为能源电力系统优化与安全理论及应用研究. E-mail: xhguan@mail.xjtu.edu.cn
https://blog.sciencenet.cn/blog-3291369-1512151.html
上一篇:旋转导向钻井工具系统实时测量的智能粒子滤波方法
下一篇:网络攻击下多智能体系统攻击检测设计与分布式弹性控制
