博文
网络攻击下多智能体系统攻击检测设计与分布式弹性控制
|
引用本文
张文雨, 徐勇, 孙健, 陈杰. 网络攻击下多智能体系统攻击检测设计与分布式弹性控制. 自动化学报, 2025, 51(10): 2347−2358 doi: 10.16383/j.aas.c250253
Zhang Wen-Yu, Xu Yong, Sun Jian, Chen Jie. Attack detection design and distributed resilient control of multi-agent systems under cyber-attacks. Acta Automatica Sinica, 2025, 51(10): 2347−2358 doi: 10.16383/j.aas.c250253
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250253
关键词
多智能体系统,虚假数据注入攻击,分布式弹性控制
摘要
提出一种集攻击检测与防御控制于一体的策略来研究执行器攻击下多智能体系统的弹性跟踪控制问题. 在攻击检测方面, 设计一种基于状态机的动态特征函数建模检测方案. 该方案提出采用线性函数观测器对执行器信号进行估计, 并依据实际信号与估计值之间的误差特性构建攻击检测准则, 以此实现对执行器攻击的有效检测. 在防御策略设计上, 为降低执行器攻击对系统跟踪共识性能的影响, 构建一种基于虚拟网络增强的协同控制系统. 该系统通过与领导者及各跟随者建立连接, 在执行器攻击信息未知的情况下, 确保系统能够实现弹性跟踪控制. 具体而言, 当检测到攻击发生时, 各跟随者的防御控制策略将切换至虚拟层提供的控制信号; 若未检测到攻击, 则维持各跟随者原有的实际控制信号. 与现有研究成果相比, 所设计的控制器无需预先获取恶意节点数量及攻击者位置等先验信息, 具有更强的实用性和适应性. 最后, 通过一个数值算例对所提出的理论算法进行验证, 结果表明该算法能够有效应对执行器攻击, 实现多智能体系统的弹性跟踪控制.
文章导读
近年来, 多智能体系统(Multi-agent systems, MASs)作为人工智能与复杂系统领域的重要研究方向, 由多个具备自主决策能力的智能体构成. 这些智能体并非孤立存在, 而是通过通信、协作与竞争机制相互连接, 形成一个高度复杂且动态变化的系统[1]. 其核心思想在于, 借助各智能体之间的局部交互, 实现全局目标的协同优化. 这种独特的架构赋予多智能体系统强大的适应性和灵活性, 使其能够应对复杂多变的环境和任务需求, 也正因如此, 它引发人们对分布式协同控制的浓厚兴趣, 并促使该技术广泛应用于多个领域, 如无人驾驶车辆[2]、电路系统[3]和电力系统[4]等. 分布式跟踪控制是多智能体系统协同控制中的基础问题之一, 其核心目标是使跟随智能体能够借助共享网络, 精准跟踪领导者的轨迹. 在实际应用中, 领导者可能是一个具有特定运动轨迹的智能体, 如无人机编队中的领航机、移动机器人集群中的引导机器人等. 跟随智能体通过与领导者以及其他跟随智能体进行信息交互, 不断调整自身的状态, 以实现与领导者轨迹的一致性. 这种协同跟踪控制技术在灾害救援、物流配送等领域具有广泛的应用前景. 然而, 开放且共享的网络环境为多智能体系统带来诸多安全隐患, 使其极易遭受网络攻击. 攻击者正是利用这一漏洞, 对系统的稳定性和安全性构成严峻挑战[5]. 一旦系统遭受攻击, 可能会导致智能体的决策失误、运动失控, 甚至引发整个系统的不稳定. 为应对这一问题, 研究者们设计多种攻击检测和缓解策略, 以保障多智能体系统的安全控制. 在多智能体系统的安全协同控制过程中, 主要面临三种类型的网络攻击: 数据完整性攻击、信息可用性攻击和信息保密性攻击. 数据完整性攻击旨在破坏数据的准确性和一致性. 虚假数据注入攻击(False-data-inject attacks, FDIAs)是其中一种典型的数据完整性攻击方式, 攻击者通过篡改传感器或执行器信号, 使智能体接收到错误的信息, 从而做出错误的决策. 重放攻击也是数据完整性攻击的一种, 攻击者截获智能体之间传输的正常数据包, 并在合适的时机重新发送这些数据包, 干扰系统的正常运行. 信息可用性攻击则通过中断通信链路或阻塞网络资源, 使智能体无法及时获取所需的信息, 导致系统性能下降甚至瘫痪. 拒绝服务攻击(Denial-of-service, DoS)是信息可用性攻击的常见形式, 攻击者通过发送大量的无用数据包, 占用网络带宽, 使智能体之间的通信受阻, 无法实现有效的协同控制. 信息保密性攻击捕获多智能体通信数据、窃取敏感信息, 易暴露关键参数或破坏协同策略. 作为其典型形式, 窃听攻击无需篡改数据, 仅监听通信链路就能提取智能体私密信息, 为后续精准攻击提供条件. 面对这些复杂多样的网络攻击, 如何设计攻击检测和防御算法来保证多智能体系统的安全控制研究仍然面临严峻挑战.
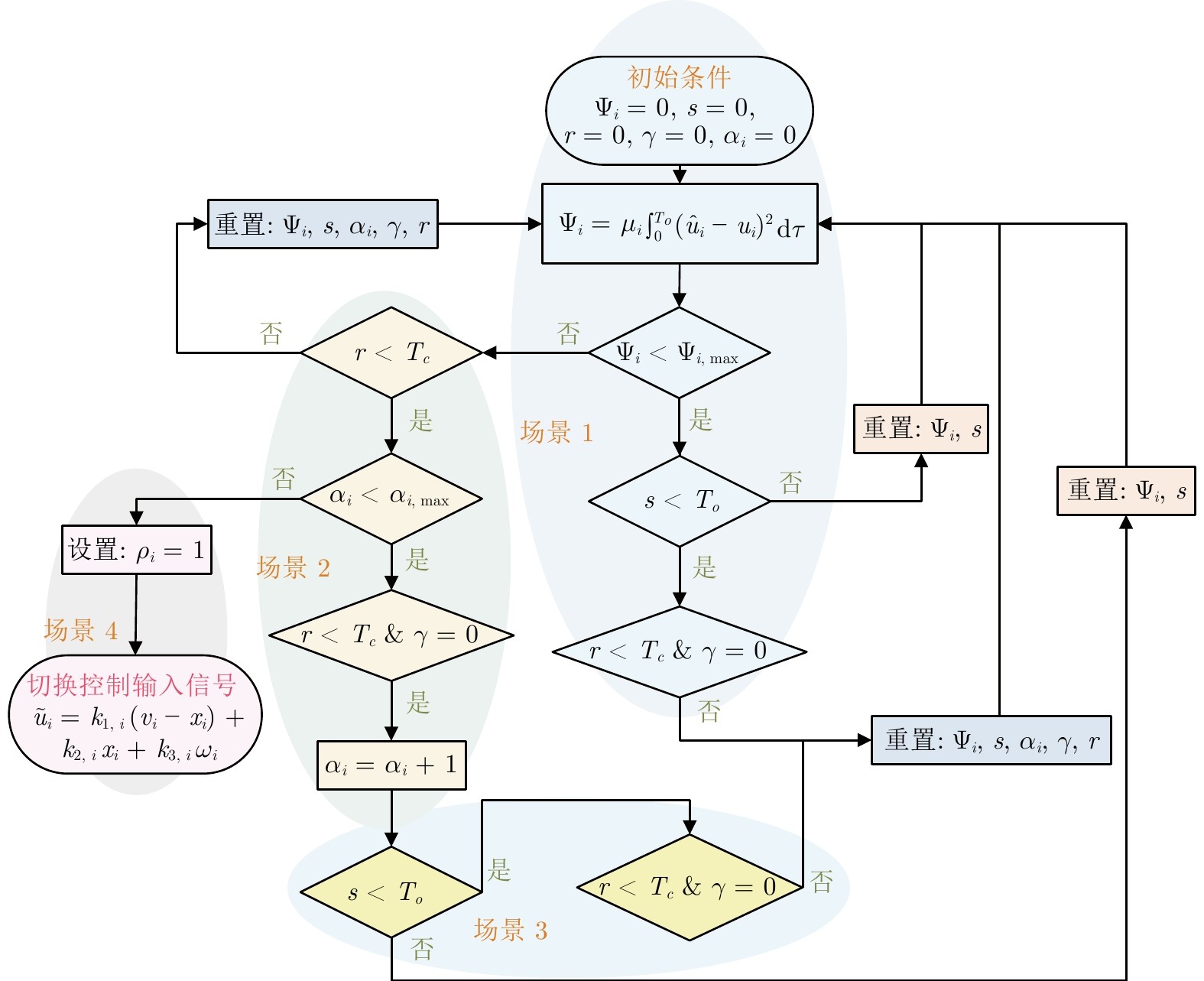
图1 本文提出的攻击检测方法流程图
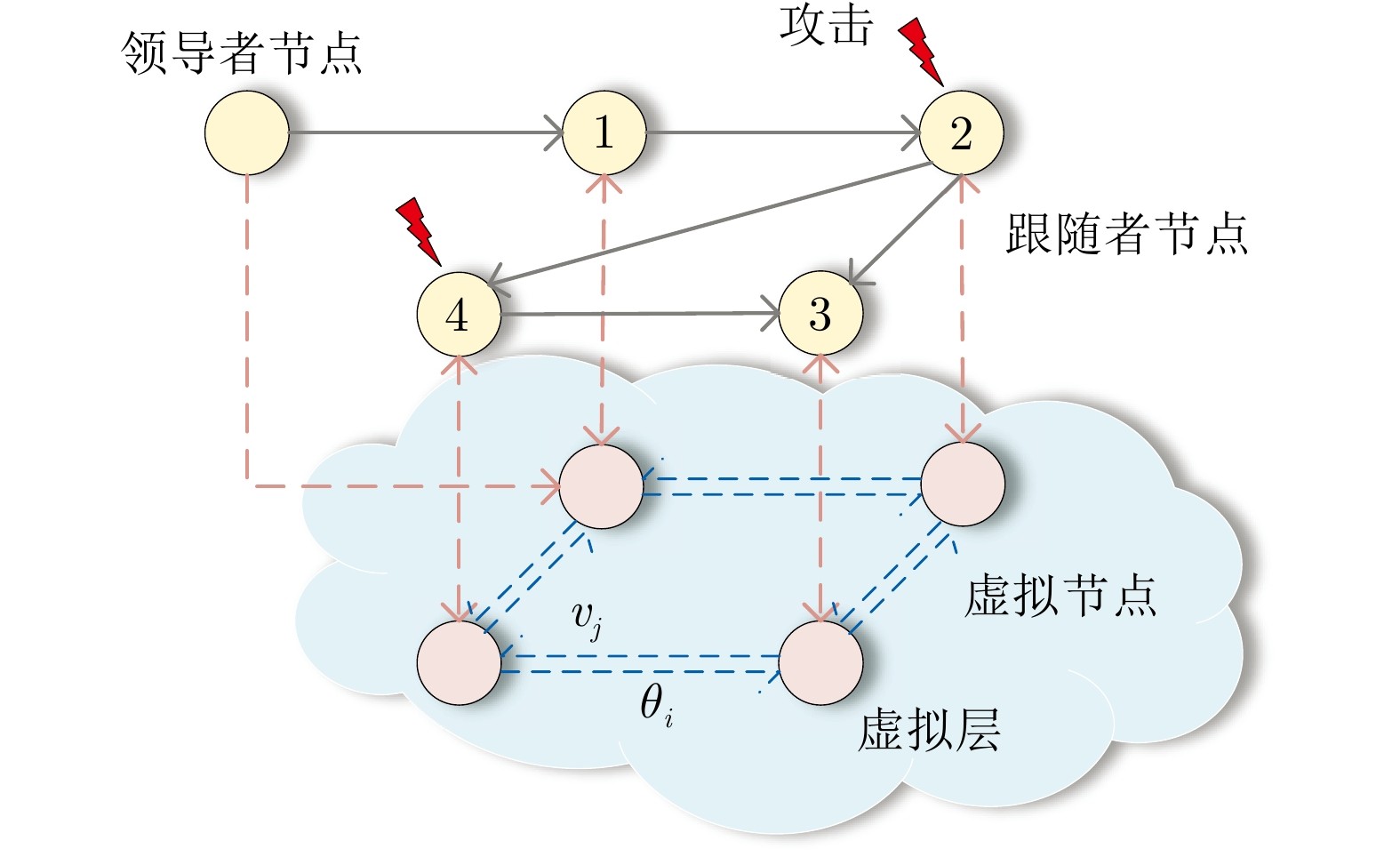
图2 虚拟分布式网络通信拓扑图
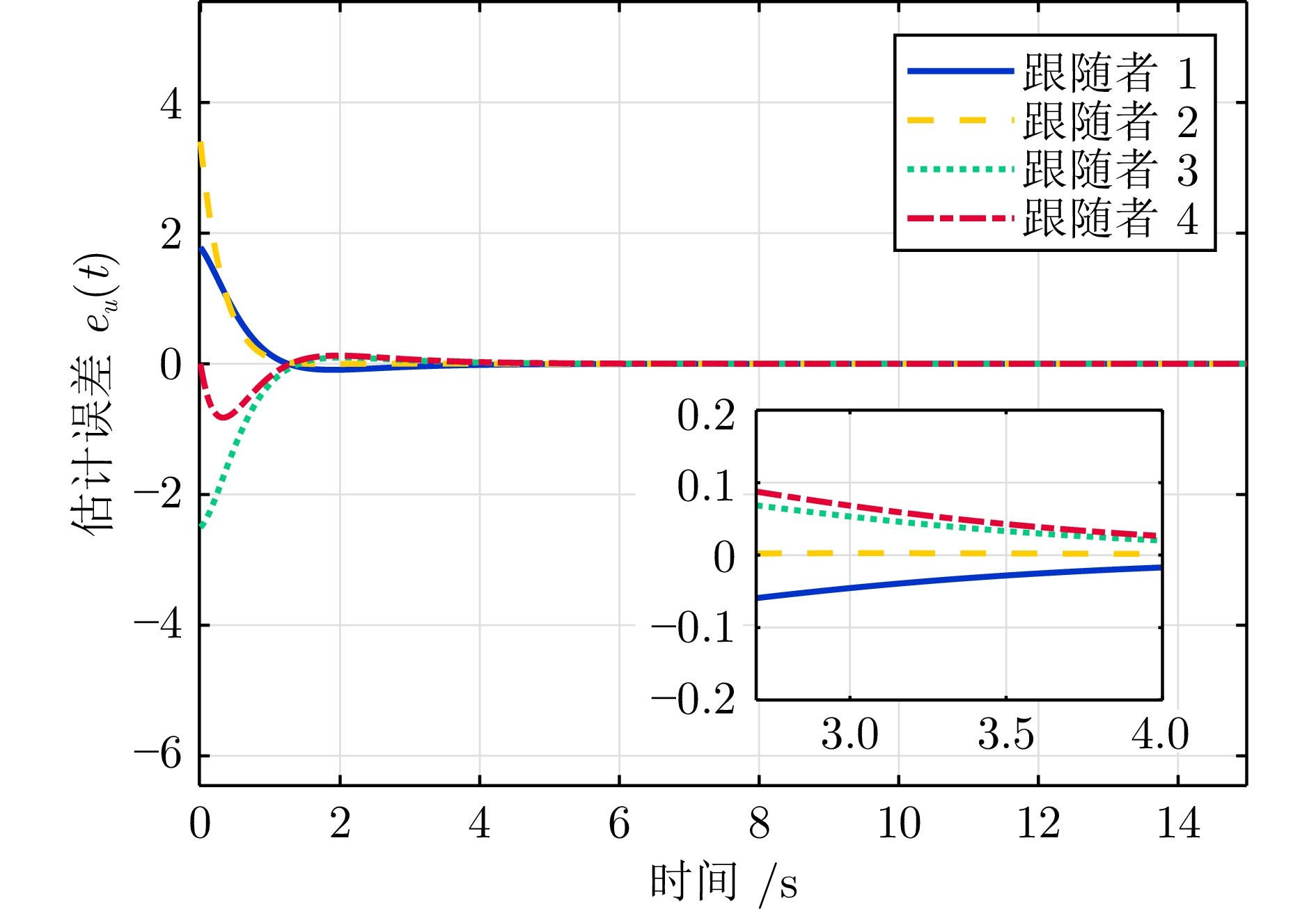
图3 利用线性观测器估计控制信号的误差
本文介绍了一种新颖的框架, 用于解决多智能体系统在存在执行器攻击时的攻击检测和弹性分布式控制问题. 在攻击检测环节, 我们开发了一种基于场景切换的检测机制. 该机制利用动态签名函数来准确识别执行器攻击, 其检测标准是基于实际信号与估计信号之间的差异推导得出的. 通过这种方式, 当执行器受到攻击时, 实际信号与估计信号会产生差异, 检测机制就能依据这一差异判断攻击的存在, 从而实现对执行器攻击的有效检测. 为了减轻执行器攻击对跟踪共识的不利影响, 我们引入了一个增强虚拟网络的安全协同控制系统. 这个系统通过构建虚拟网络, 为多智能体系统提供了一层额外的安全保障, 使得系统在面对攻击时能够更好地维持其正常运行. 最后, 通过严格数值例子验证了理论算法, 结果表明该框架能有效检测执行器攻击, 实现弹性分布式控制, 保障系统稳定运行.
作者简介
张文雨
北京理工大学自动化学院硕士研究生. 2022年获得吉林大学自动化专业学士学位. 主要研究方向为多智能体系统, 分布式协同控制, 网络控制系统. E-mail: zhangwenyu@bit.edu.cn
徐勇
北京理工大学自动化学院教授. 2020年获得浙江大学控制科学与工程专业博士学位. 主要研究方向为多智能体系统, 分布式协同控制与应用, 强化学习/数据驱动控制, 事件触发控制, 安全分析, 网络控制系统. 本文通信作者. E-mail: xuyong@bit.edu.cn
孙健
北京理工大学自动化学院教授. 2007年获得中国科学院自动化研究所控制理论与控制工程专业博士学位. 主要研究方向为网络控制系统, 时延系统, 信息物理系统. E-mail: sunjian@bit.edu.cn
陈杰
北京理工大学自动化学院教授. 2001年获得北京理工大学控制理论与控制工程专业博士学位. 主要研究方向为复杂系统, 多智能体系统, 多目标优化与决策, 约束非线性控制. E-mail: chenjie@bit.edu.cn
https://blog.sciencenet.cn/blog-3291369-1512153.html
上一篇:面向电力系统快速频率响应的数据与模型驱动预测控制
下一篇:多智能体系统协同互估计与控制一体化框架
