博文
Nano Res.[器件]│郑州大学毛彦超:基于驻极体纳米纤维摩擦电传感器的非接触VR人机界面
||
背景介绍
虚拟现实(Virtual Reality,VR)技术作为新一代信息技术的重要组成部分,近年来在游戏娱乐、教育培训、医疗康复、工业仿真等领域得到了快速发展。借助高性能渲染、空间定位和多模态感知技术,VR能够为用户提供高度真实的视觉、听觉甚至触觉体验,使人们得以在虚拟环境中进行自然的交互操作。与此同时,虚拟现实人机界面作为连接用户与虚拟世界的关键桥梁,其交互方式直接决定了体验的沉浸感与操控效率。目前主流的VR交互仍依赖于手柄、数据手套等可穿戴或外设式设备,但这些方式存在操作复杂、自由度受限、沉浸感不足等问题。因此,发展更加自然、便捷的虚拟现实人机交互模式,尤其是基于非接触式手势识别的交互技术,已成为推动VR进一步普及与升级的关键方向。
成果简介
本研究开发了一种聚乳酸/热塑性聚氨酯(PLA/TPU)纳米纤维驻极体摩擦电传感器(ETS),并基于该传感器阵列采集识别非接触三维手势信号,进一步通过深度学习辅助开发了非接触式VR人机界面。PLA/TPU驻极体的纳米纤维结构增强了摩擦电传感器的电荷保留能力,从而显著提高了摩擦电传感器的信号强度和稳定性。结合基于深度学习的多层感知机神经网络,驻极体传感器实现了对18种不同类型3D手势的非接触识别,平均准确率高达97.3%。进一步开发了基于ETS的智能非接触VR交互系统,成功通过非接触三维手势实现了对游戏角色操控。与传统的VR人机界面相比,基于PLA/TPU驻极体纳米纤维的VR人机界面可以检测多种非接触三维手势,并具有更高的交互自由度。该工作将摩擦电三维手势识别方法引入到VR人机界面中,为开发下一代非接触式VR界面提供了一种有效途径。
图文导读
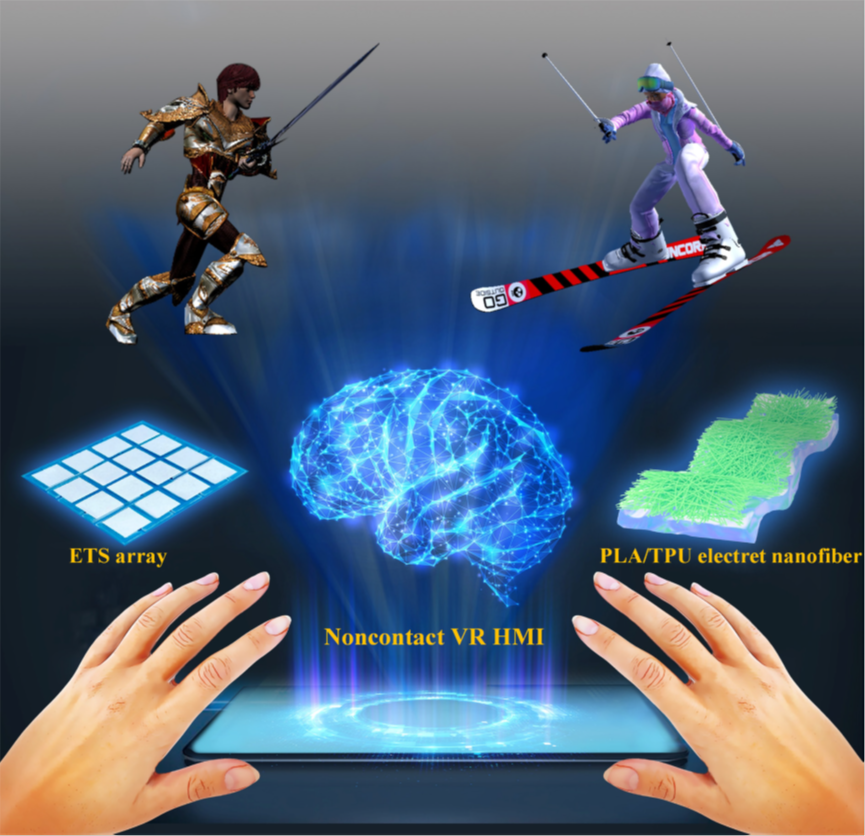
图1 基于ETS的非接触式VR交互系统示意图。
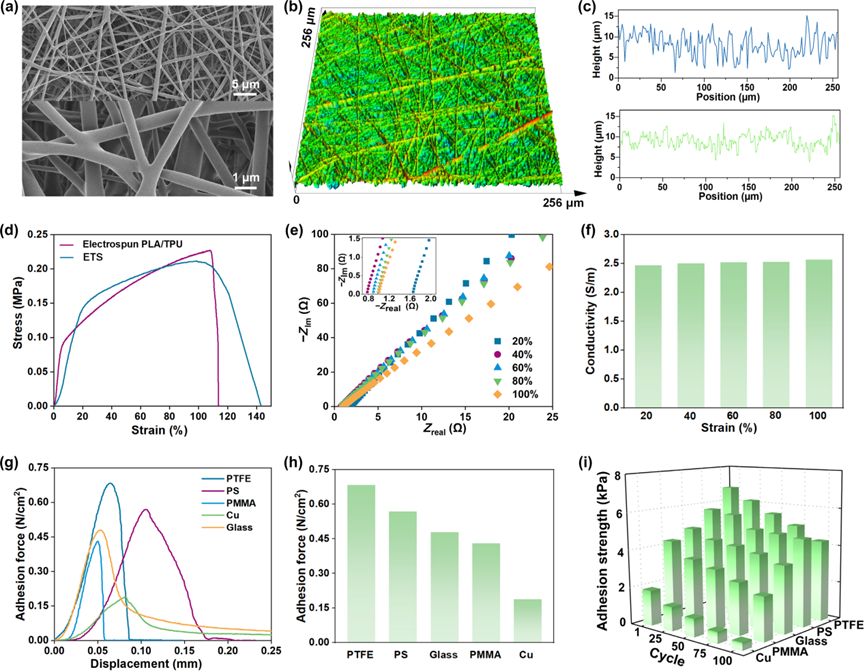
图 2 ETS的形貌、电学和力学性质。
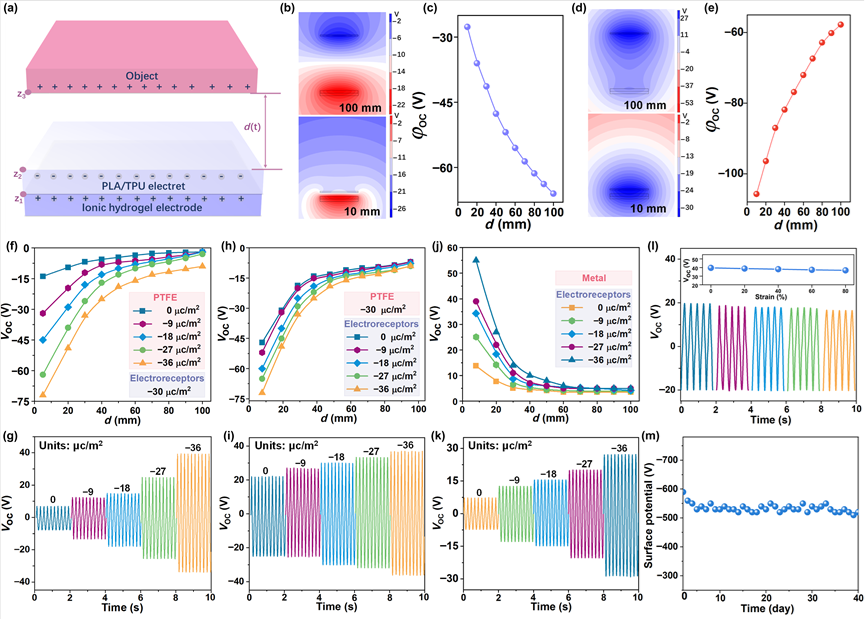
图 3 ETS的非接触传感测试
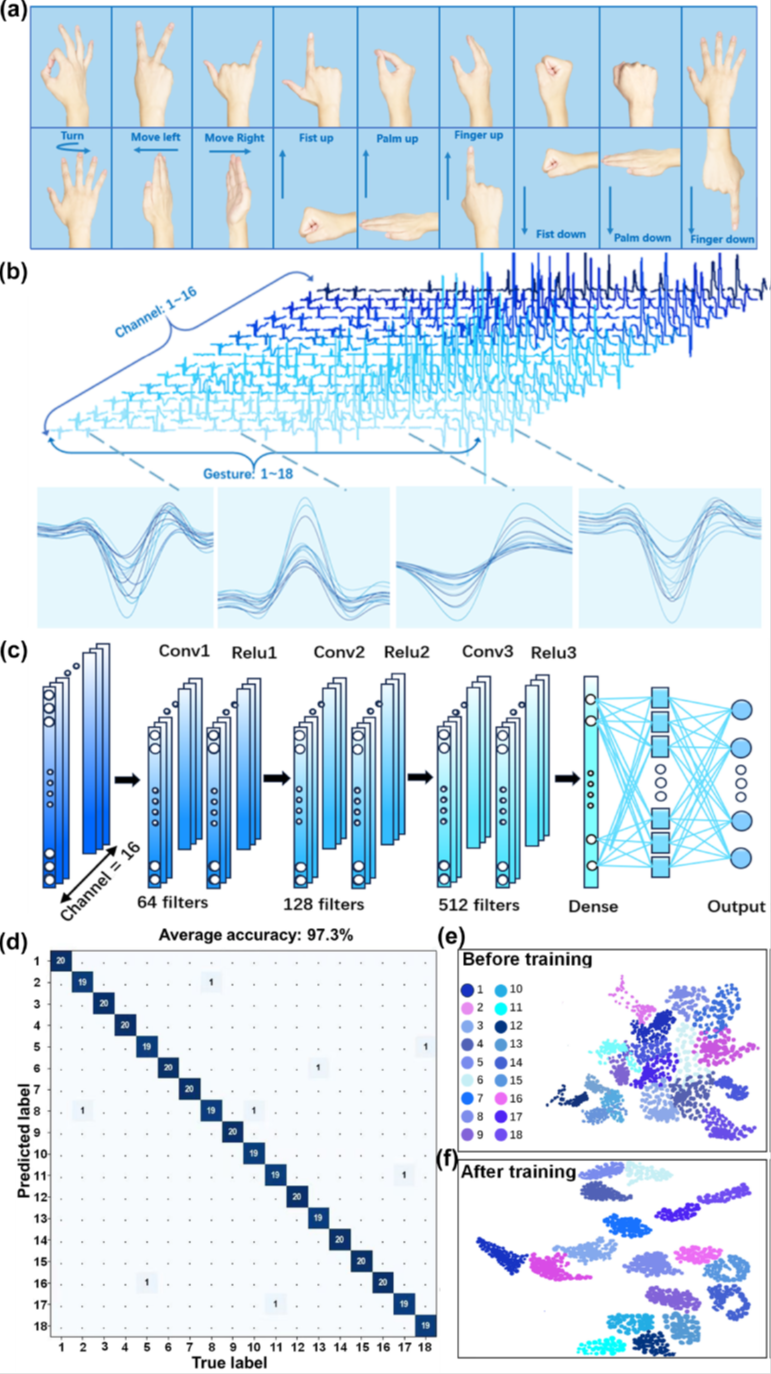
图 4 深度学习辅助非接触手势识别。
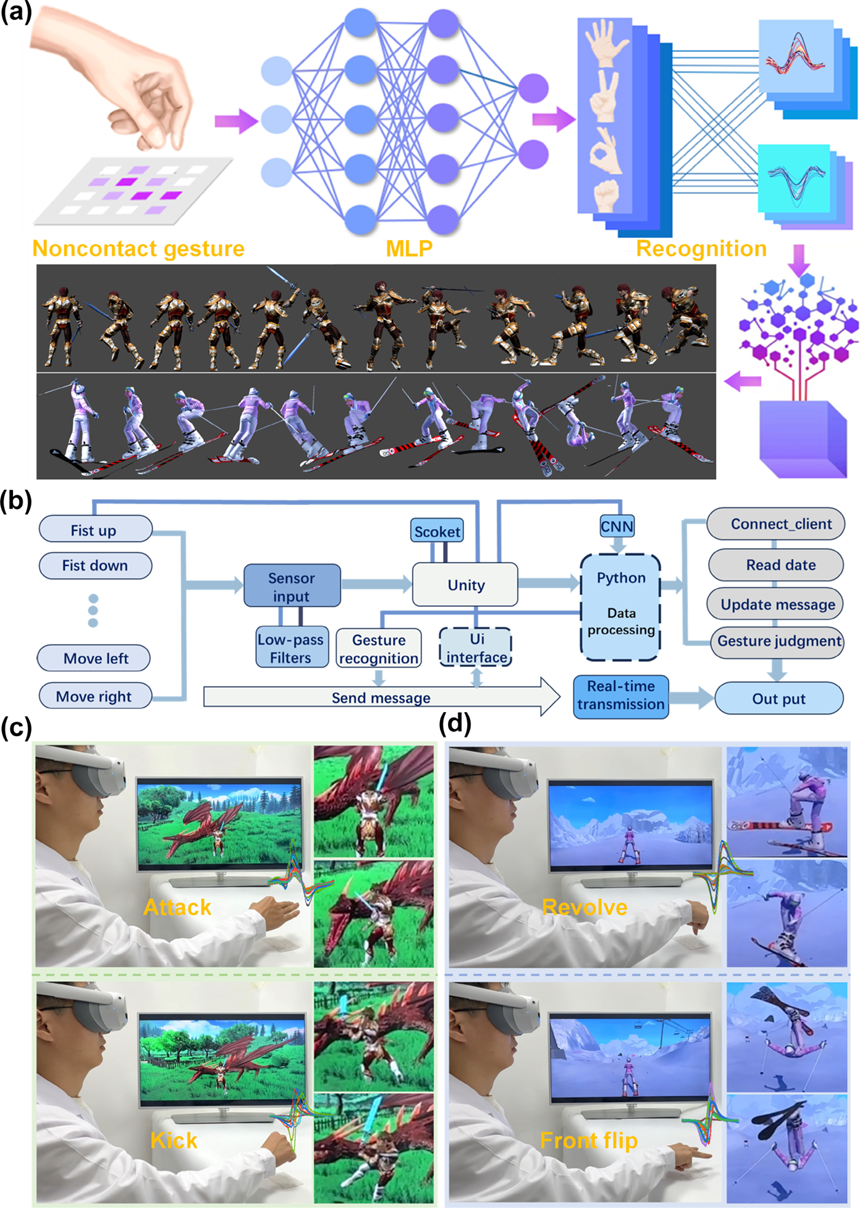
图5 基于非接触手势识别的智能VR交互系统应用。
课题组简介
毛彦超,郑州大学物理学院教授、博士生导师。博士毕业于中山大学,曾在威斯康星大学麦迪逊分校从事研究工作。目前主要从事柔性传感的研究,主要研究成果以第一/通讯作者发表在Nature Commun., Adv. Funct. Mater., ACS Nano, Nano Res. 等著名学术期刊上。曾获河南省青年科技奖、河南省优秀青年科技专家、中原青年拔尖人才,主持国家自然科学基金面上项目、青年项目等科研项目。相关研究成果曾被新华网、中国日报、科技日报、基金委科学传播中心、教育部科技发展中心, ScienceDaily, Phys.org, Materials Today, IEEE Spectrum, NASA Tech Briefs等中外媒体作为研究亮点报道。
文章信息
Lu L, Wu J, Zhang Y, et al. Noncontact 3D gesture recognition enabled VR human–machine interface via electret-nanofiber-based triboelectric sensor. Nano Research, 2025, 18(11): 94907924. https://doi.org/10.26599/NR.2025.94907924.

识别二维码或点击左下角“阅读原文”可访问全文

https://blog.sciencenet.cn/blog-3563286-1512508.html
上一篇:Nano Res.[生物]│汕头大学张薄博教授/杨琼琼讲师团队:一种盔甲化益生菌靶向递送系统治疗炎症性肠病新路径
下一篇:【Building Simulation】主动加热式日光温室微气候异质性及冠层群体效应的精确量化
