博文
清华大学柏韧恒等综述:具有结构化运动特征的磁控软体运动机器人
|
原文出自FlexTech (柔性技术)期刊
Cite this article:
Liu, W., Yang, Y., Liu, L. and Bo, R. (2025), Structured Locomotive Magnetic Soft Robots. FlexTech. https://doi.org/10.1002/fle2.70000
文章DOI:https://doi.org/10.1002/fle2.70000
1、导读
本文以磁控软体机器人的结构构型与运动模式间的关联关系为主线,较为系统的总结了现有磁控软体运动机器人的材料组成、制备方法、运动模式及应用,并对结构化磁控软体机器人的现有挑战和未来发展方向进行了分析与展望。
2、研究背景
磁控软体机器人兼具快响应、高可控和大变形等优势,在临床手术、药物输送等领域极具应用价值。近年来,随着材料合成与微纳加工技术的不断发展,该类机器人的结构构型日趋多样,与此同时,也催生了诸如爬行、跳跃、游动等丰富的运动模式,极大丰富了磁控软体机器人的功能和潜在应用场景。因此,如何通过创新的机器人结构构型设计,实现新的运动模式与全新的结构化功能,以进一步提升磁控软体机器人在复杂非结构化环境中的适应性与任务执行能力,成为领域发展关键挑战。
3、文章亮点
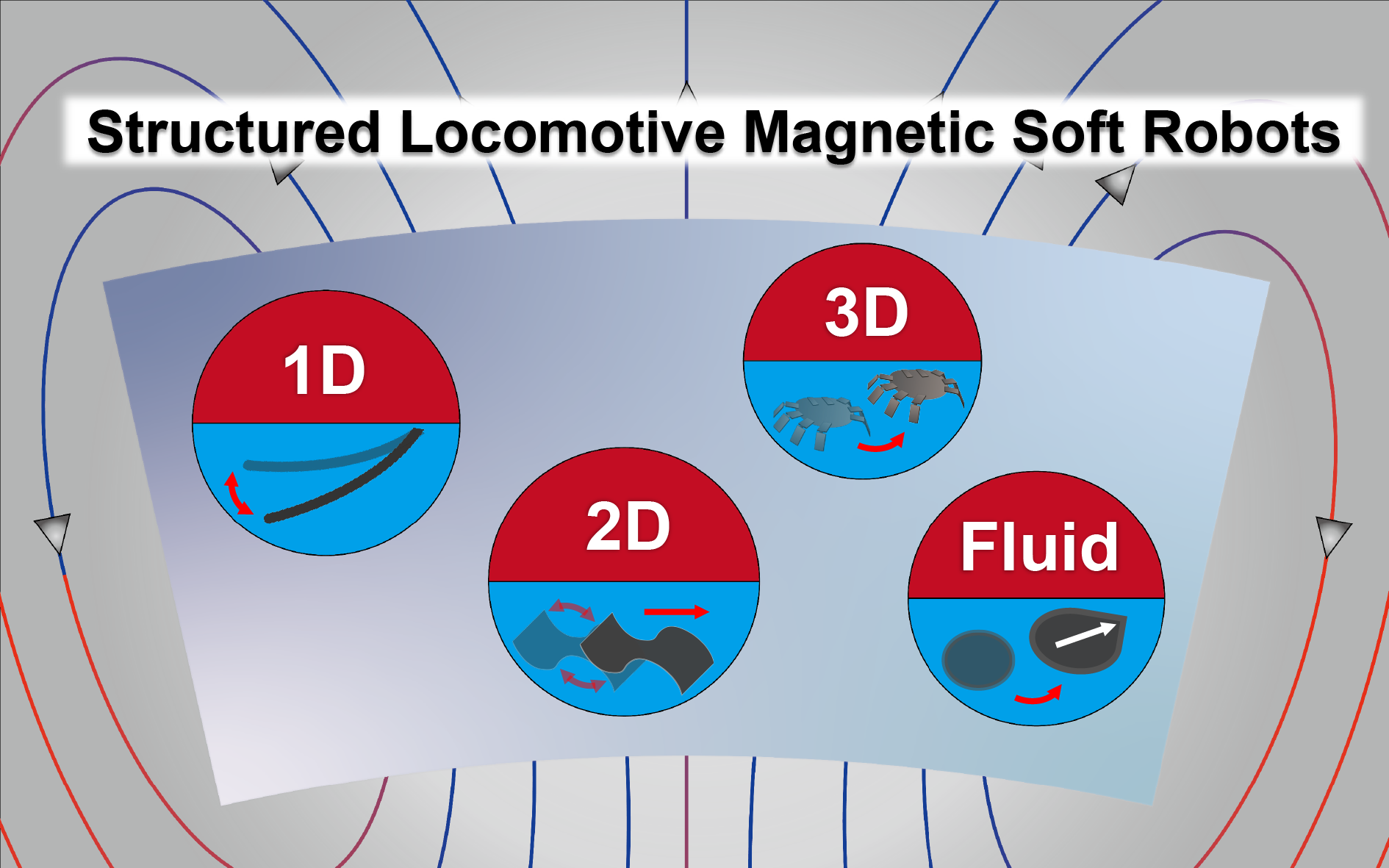
本文以磁控软体机器人的结构构型与运动模式间的关联关系为主线,将其分为一维磁控软体机器人、二维磁控软体机器人、三维磁控软体机器人及流体磁控软体机器人四种类型,系统综述了由机器人迥异的结构构型所催生的多样化运动模式,及其关联关系;并基于此,分析了该类机器人的现有挑战,展望了未来结构化磁控软体机器人的发展方向。
4、研究结果及结论
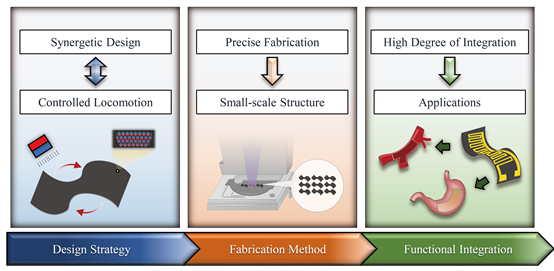
本文系统总结了4类结构构型所牵引的磁控软体机器人的不同运动模式及其运动场景差异:一维磁控软体机器人多为螺旋杆状构型,该类机器人通常具有螺旋推进与阶梯攀爬的移动模式;二维磁控软体机器人多为平面薄膜状构型,通常具有行走、跳跃、滚动等;相较一维、二维磁控软体机器人,三维磁控软体机器人具有更高的设计自由度,更复杂的结构构型,以及更加多样化的运动模式和功能,例如,攀爬、跳跃、弯曲、复杂仿生运动模式等;流体磁控软体机器人依赖其流体的特征,可以实现分裂重组变形,从而更适合于穿越狭窄通道作业。综上,因结构构型差异所带来的磁控软体机器人运动模式的多样性,极大丰富了该类机器人的应用场景,同步考虑机器人结构构型-运动模式-作业功能的协同设计方法、微纳尺度下的精准加工技术以及更高的功能集成度,是该领域未来的重要发展方向。
5、作者及研究团队简介

柏韧恒,博士,清华大学柔性电子技术国家级重点实验室副研究员。2020年在澳大利亚国立大学工学院获博士学位。2020年底,获国家博士后交流计划引进项目,加入清华大学航天航空学院进行博士后研究。2023年博士后出站留校后,加入清华大学柔性电子技术国家级重点实验室,任副研究员。长期从事三维柔性电子器件、纳米功能薄膜材料合成等前沿交叉领域研究,已在Science,Science Advances,Advanced Materials,Materials Today等期刊发表SCI论文40余篇,以(共同)第一/通讯作者在Science,Chemical Reviews等期刊发表论文10余篇。
《柔性技术(英文)》(FlexTech)期刊简介
FlexTech(《柔性技术(英文)》)是由清华大学主办、清华大学柔性电子技术实验室提供学术支持、清华大学出版社编辑出版、Wiley出版集团海外发行的全新国际学术期刊。期刊由清华大学冯雪教授担任主编,新加坡国立大学Chwee Teck Lim教授、韩国光州科学技术院Young Min Song教授、澳大利亚悉尼大学Kourosh Kalantar-Zadeh教授等担任副主编,美国西北大学John A. Rogers教授和黄永刚教授等为期刊咨询委员会成员。
期刊主页:https://onlinelibrary.wiley.com/journal/27711714
投稿地址:https://mc.manuscriptcentral.com/flextech
期刊邮箱:flextech@tup.tsinghua.edu.cn

https://blog.sciencenet.cn/blog-3534092-1480548.html
上一篇:东北大学刘绍宏研究员:“双管齐下”,破解激光照明高温难题的“材料密码”—让激光器件“冷静”发光的秘密武器
下一篇:齐鲁工业大学欧阳俊课题组:兼具高极化强度、高储能效率与低制备温度的钛酸钡薄膜电容器

全部作者的精选博文
- • 苏州国家实验室/哈尔滨工业大学:热力学原理驱动的近零烧蚀HfO2-SiBOC轻质陶瓷设计新范式
- • 收官“十四五”:从“卓越计划”到“卓越生态”——2025年我国中文科技期刊发展盘点
- • 西北工业大学付前刚/孙佳等:纳米颗粒诱导相变实现陶瓷基复合材料强韧化与耐烧蚀
- • 安徽工业大学冒爱琴/南阳师范学院刘雪枫等:室温液相还原策略实现氧空位“纯净”引入,破解HEO负极储锂动力学瓶颈
- • 安徽工程大学谢爱文/清华大学王晓慧等:弛豫-超顺电过渡态,助力无铅NaNbO3基多层陶瓷电容器实现优异储能性能
- • 华中科技大学章宏进/程卫/鲁涛/彭洋等:高亮度激光照明用ZrO2微球反射增强型PiGF@ZS荧光转换器
全部作者的其他最新博文
- • 苏州国家实验室/哈尔滨工业大学:热力学原理驱动的近零烧蚀HfO2-SiBOC轻质陶瓷设计新范式
- • 收官“十四五”:从“卓越计划”到“卓越生态”——2025年我国中文科技期刊发展盘点
- • 西北工业大学付前刚/孙佳等:纳米颗粒诱导相变实现陶瓷基复合材料强韧化与耐烧蚀
- • 安徽工业大学冒爱琴/南阳师范学院刘雪枫等:室温液相还原策略实现氧空位“纯净”引入,破解HEO负极储锂动力学瓶颈
- • 安徽工程大学谢爱文/清华大学王晓慧等:弛豫-超顺电过渡态,助力无铅NaNbO3基多层陶瓷电容器实现优异储能性能
- • 华中科技大学章宏进/程卫/鲁涛/彭洋等:高亮度激光照明用ZrO2微球反射增强型PiGF@ZS荧光转换器