博文
基于改进ESO的星间激光通信精跟踪自适应自抗扰控制
|
引用本文
李伟鹏, 刘泽书, 包泽宇, 乔建忠, 朱玉凯. 基于改进ESO的星间激光通信精跟踪自适应自抗扰控制. 自动化学报, 2025, 51(12): 2633−2647 doi: 10.16383/j.aas.c250102
Li Wei-Peng, Liu Ze-Shu, Bao Ze-Yu, Qiao Jian-Zhong, Zhu Yu-Kai. Adaptive ADRC for the fine tracking system in inter-satellite laser communication based on improved ESO. Acta Automatica Sinica, 2025, 51(12): 2633−2647 doi: 10.16383/j.aas.c250102
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250102
关键词
扩张状态观测器,自抗扰控制,自适应滤波,激光通信捕跟技术,激光稳定控制,星间激光通信
摘要
星间激光通信中的光束指向误差会显著降低链路质量. 精跟踪系统因其高带宽特性, 主要负责对高频扰动进行实时修正. 针对精跟踪环节所面临的高频扰动, 传统自抗扰控制(ADRC)在扰动估计与补偿方面仍存在性能瓶颈. 本文考虑一种特殊的干扰形式, 并基于此构造具备频率分离能力的改进扩张状态观测器, 实现对快、慢变扰动的解耦. 在此基础上提出一种融合自适应滤波的自适应ADRC框架, 该方法在传统ADRC框架基础上, 引入并联自适应滤波器, 通过滤波器权重在线更新实现对光束指向误差的自适应抑制, 提升系统在高频干扰下的控制性能. 实验结果表明, 所提方法相比传统控制方法具有更强的扰动抑制能力.
文章导读
伴随着卫星互联网技术的不断发展, 星间通信数据量和通信速度的需求逐步增加. 激光通信使用激光作为通信的载体, 频率更高、能量集中, 具有带宽高、功耗低、安全性高以及频谱不需要授权等优点[1−3], 能够适应日益增长的星间通信数据量和通信速度的需求, 逐渐成为近年来研究的热点方向.
激光通信系统对光束的指向精度具有极高要求. 受限于卫星平台姿态控制精度及微振动环境的影响[4−5], 光束指向易产生抖动, 降低通信光纤的耦合效率, 从而使得链路性能衰退[6]. 为实现高精度光束指向与稳定传输, 大多数星间通信终端均配备了指向–瞄准–跟踪(Pointing-aiming-tracking, PAT)系统来实现光束的精确指向和抖动抑制. 当前主流的PAT系统大多采用粗/精复合跟踪架构, 其中粗跟踪环节一般采用转台或并联机构完成大范围指向调节, 精跟踪环节则通常采用快速反射镜实现对高频扰动的补偿[7−10]. 中高频扰动主要由精跟踪环节进行抑制, 其性能对系统整体的动态性能有关键影响[10]. 本文主要针对基于快反镜的精跟踪环路的光束稳定控制问题开展研究.
自适应滤波器因其对窄带干扰具有优异的抑制能力, 是精跟踪光束抖动控制领域的重要研究方向之一[16−22]. 在该方法中, Ma等[16]将PI与滤波x最小均方算法(Filtered-x least mean square, FxLMS)相并联的控制方法用于基于快反镜的精跟踪回路的光束抖动抑制. Watkins等[17]将自适应偏置观测器(Adaptive bias filter, ABF)加入FxLMS环节中, 提出线性二次调节器(Linear quadratic regulator, LQR)与FxLMS/ABF的复合控制方法, 显著提升了FxLMS控制器的收敛速度. Yoon等[18]在文献[17]的基础上改用滤波x递归最小二乘算法(Filtered-x recursive least squares, FxRLS), 进一步提高收敛速度并减少控制误差. 随后Beerer等[19]在文献[17−18]的基础上进一步研究不同自适应方法的控制效果并加以比较. Wang等[20]针对基于快反镜的精跟踪回路的光束抖动控制问题, 提出一种滤波x变步长归一化最小均方(Filtered-x variable step-size normalized least mean square, FxVSNLMS)方法, 相比传统的归一化最小均方(Normalized least mean square, NLMS)方法进一步减少了控制误差. 周睿等[21]使用双二阶线性补偿器有效抑制了快反镜谐振, 并在原有的PI控制器基础上加入LMS自适应滤波器, 进一步提高系统的闭环带宽以及光束抖动抑制能力. Su等[22]在文献[20]的基础上, 提出一种基于Q参数的自适应滤波前馈方法, 在保证系统稳定的前提下进一步降低控制误差.
基于干扰观测器的控制方法(Disturbance observer based control, DOBC)也被广泛应用于激光指向稳定控制问题[23−26]. Zhu等[23]针对激光通信中卫星本体的指向控制设计一种同时结合干扰观测器和扩张状态观测器(Extended state observer, ESO)的控制方式, 提高控制精度并减少控制所需的能量. Yang等[24]提出一种基于固定时间收敛干扰观测器的控制方法并将其用于潜望镜式粗跟踪机构的控制, 同时进一步证明其控制误差也满足固定时间收敛准则. Yang等[25]随后又提出一种结合元模型(Meta model)技术与干扰观测器的控制方法, 并将其用于含约束条件下的粗跟踪回路永磁同步电机的控制, 相比于传统DOBC进一步提升了鲁棒性和控制性能.
自抗扰控制(Active disturbance rejection control, ADRC)是Han[27]提出的一种由PID控制发展而来的非线性控制方法. 随后由Gao[28]进一步发展为线性自抗扰控制(Linear active disturbance rejection control, LADRC), 解决了调参较难和非线性项较多的问题, 使其向着工程应用更近了一步. 目前, 该方法在激光指向稳定控制领域也得到较为广泛的应用[29−31].
可以看出, 目前在激光通信领域基于快反镜的精跟踪回路中, PID控制与自适应滤波方法仍是主要的光束抖动控制手段; 而基于干扰观测器的方法和ADRC主要应用在卫星本体、粗跟踪环路以及ORU的控制上, 仅有文献[29]在精跟踪回路的光束抖动控制中对ADRC进行了仿真研究, 相关研究仍较为有限. PID控制中调节参数较少, 需要在鲁棒性和其他性能之间进行取舍, 往往无法实现最佳的控制效果. 自适应滤波器等方法虽然对窄带误差具有极好的抑制效果, 但是其需要质量较高的参考信号, 当前研究中常采用独立传感器提供参考输入, 如文献[19−20, 22]均采用加速度计的测量信号作为参考信号. 然而, 引入额外传感器一方面增加了系统复杂度, 另一方面只能测量本地终端的干扰, 难以全面获取多源干扰信息. 基于干扰观测器的控制方法虽具备一定的建模补偿能力, 但其依赖于具体的干扰模型. 实际通信终端的通信对象不固定, 各目标卫星可能具有显著不同的微振动特性, 难以用同样的干扰模型进行建模, 限制了这一类方法在工程中的应用.
ESO作为ADRC的核心, 能够将系统所受外部扰动以集总干扰的形式进行估计. 星间激光通信场景中, 卫星平台微振动环境导致干扰频率往往较高, 使得传统ESO在扰动估计精度及补偿效果上面临挑战, 从而限制了传统ADRC的控制性能. 本文通过改进ESO的结构, 将干扰按照其频率分为零均值的快变干扰和近乎常值的慢变干扰, 并使用线性时不变控制器与自适应滤波器同时进行补偿. 本文主要工作如下:
1)通过考虑一种特殊的干扰动力学模型提出一种新的干扰建模方式, 将系统干扰分解为近乎常值的慢变干扰和零均值的快变扰动两部分. 基于此构造改进ESO, 突破传统ESO只能估计集总干扰的限制, 后续可以针对不同扰动的特点, 使用差异化的控制方式, 从而提升整体控制性能.
2)针对两种干扰的特点以及由压电陶瓷快反镜构成的精跟踪回路的动力学特性, 设计基于改进ESO的激光通信自适应ADRC方法. 该方法采用PID控制器替代传统ADRC中的比例–微分(Proportional-derivative, PD)控制器, 提升系统高频控制能力. 同时, 控制器中引入自适应滤波机制, 通过利用改进ESO观测到的快变扰动, 实时调整滤波器权重, 实现对不同频率扰动的自适应抑制, 有效地提升高频控制性能.
本文其余部分如下: 第1节对精跟踪动力学方程进行推导, 考虑一种特殊的干扰动力学模型, 并推导扩张状态方程; 第2节基于扩张状态方程构造改进ESO并设计自适应ADRC方法; 第3节对所提出的改进ESO的干扰分离能力以及所提控制方法的光束抖动抑制能力进行实验验证; 第4节为结束语.
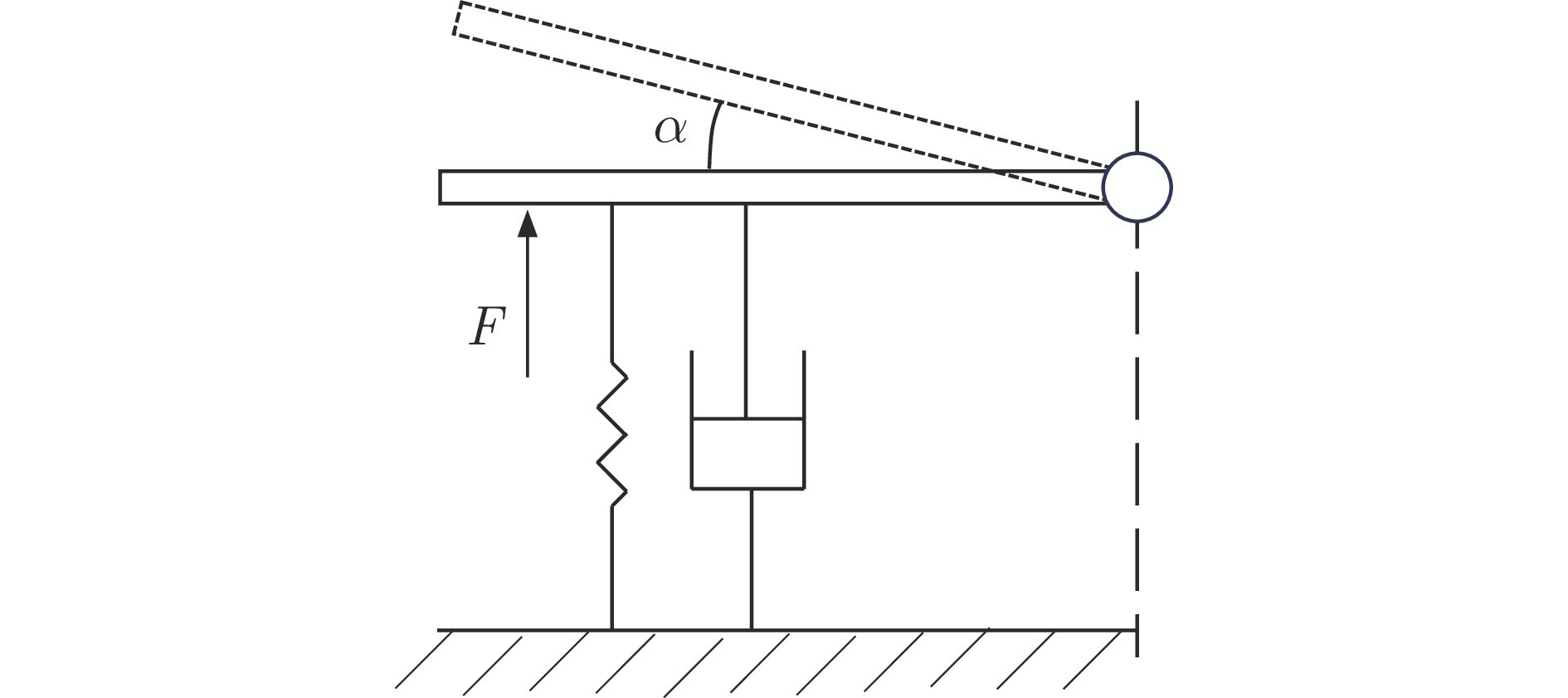
图1 动力学模型示意图
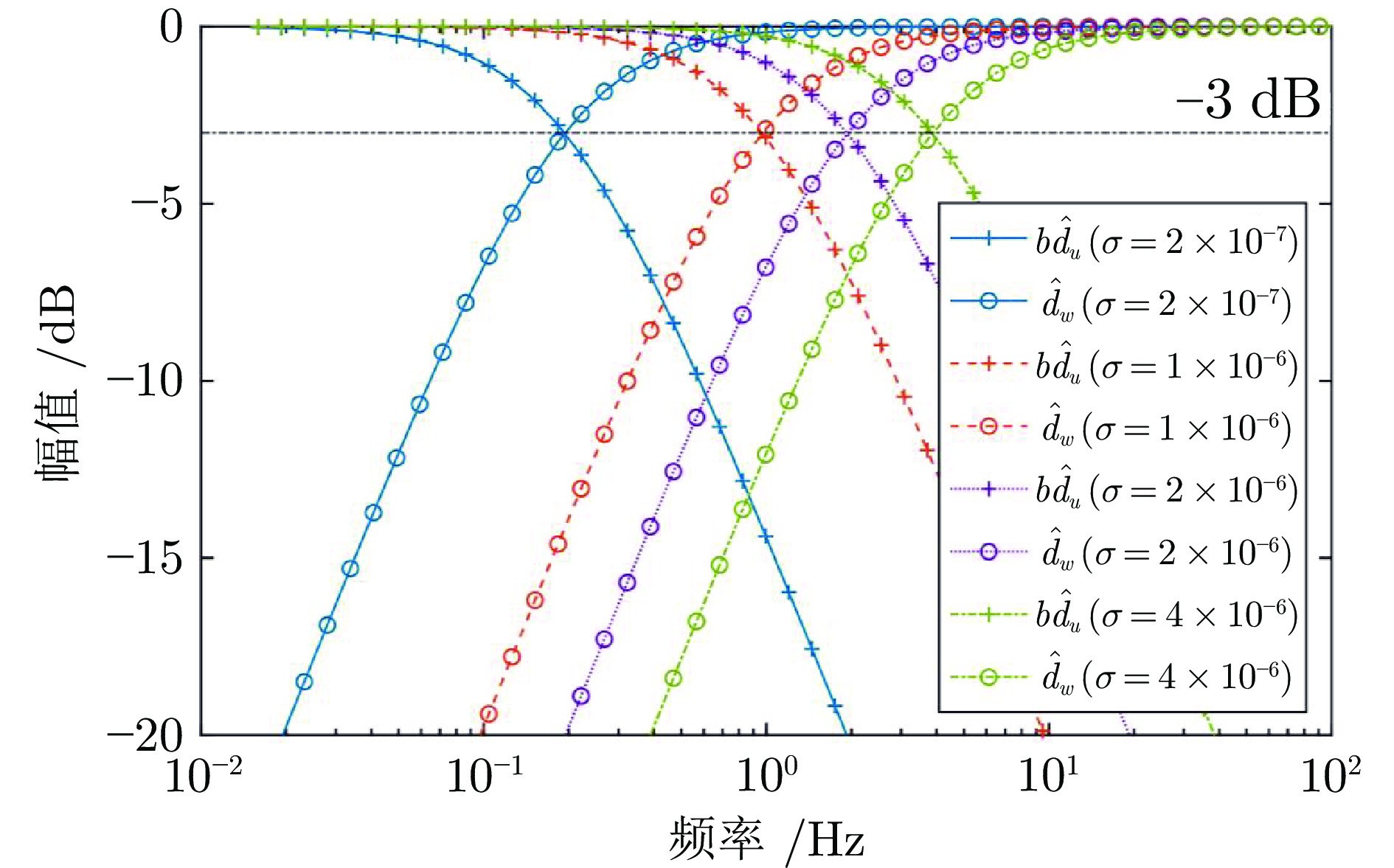
图2 频率分离特性
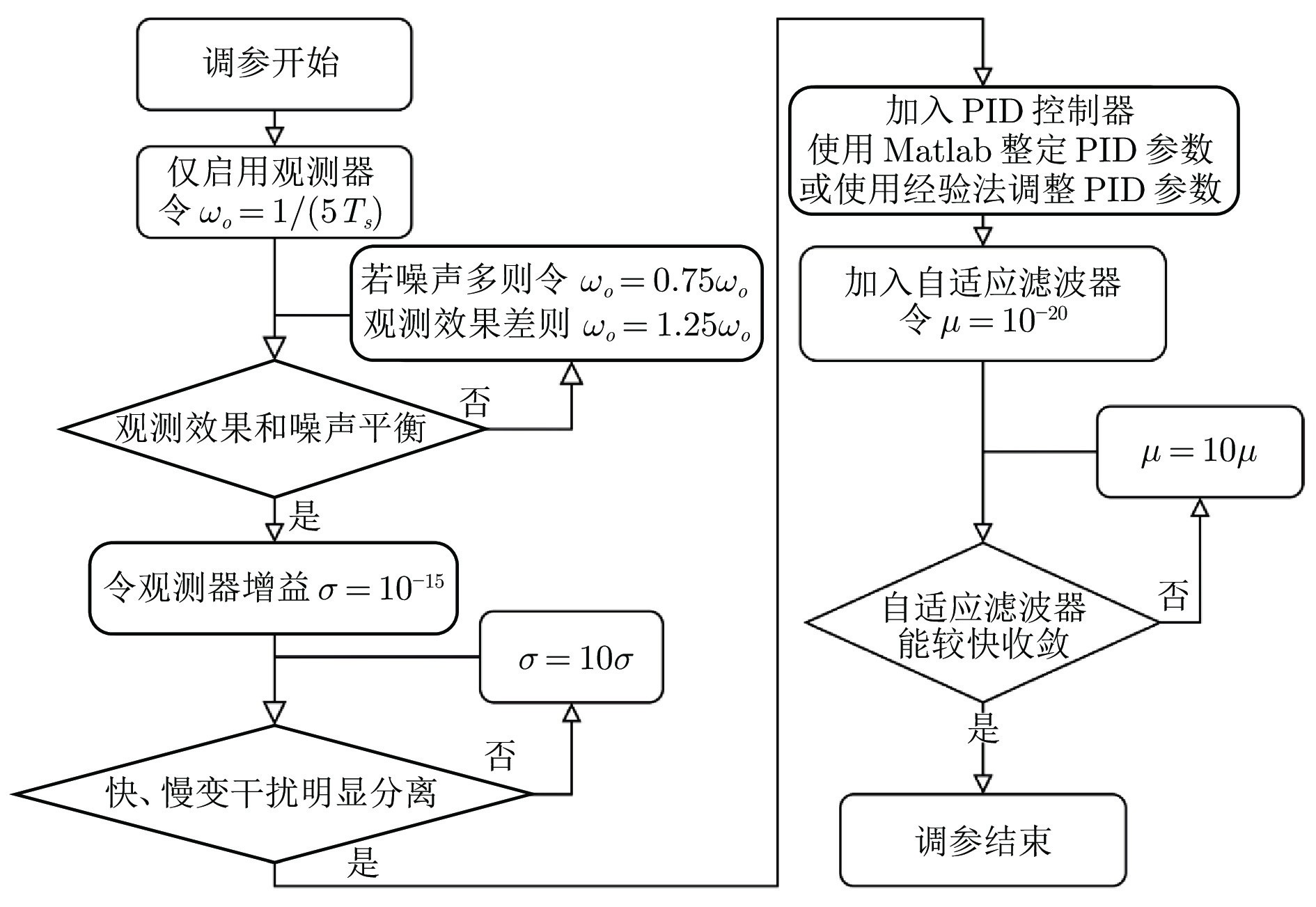
图3 调参流程图
本文在考虑一种特殊的干扰动力学模型的基础上, 提出一种新的干扰建模方式, 随后对该建模方式中快变和慢变干扰估计值的频率响应进行理论推导, 最终基于此干扰模型构造扩张状态方程以及改进ESO. 改进后的ESO能够分别对慢变干扰和快变干扰进行估计.
针对激光通信精跟踪回路所受干扰的特点, 本文提出基于改进ESO的激光通信自适应ADRC方法, 实现了激光光束抖动的抑制. 所提方法的线性时不变控制器采用PID形式, 并在此基础上加入自适应滤波环节, 进一步提升了高频控制效果.
最终, 在激光通信捕跟控制算法实验平台上, 验证了改进ESO的干扰估计能力和本文所提出的控制方法的光束抖动抑制能力. 在干扰估计实验中, 本文提出的改进ESO能够分别对慢变干扰和快变干扰进行有效估计, 快变和慢变干扰的频率响应特性符合理论计算结果. 在光束抖动抑制实验中, 本文提出的方法消除90%以上的指向误差. 指向误差的RMS相比PID方法减少74%以上, 相比传统LADRC方法减少84%以上, 在不依赖外部干扰信息的情况下, 指向误差的RMS相比FxLMS+PID方法进一步减少34%以上, 并且在实验中表现出了更好的稳定性.
作者简介
李伟鹏
北京航空航天大学宇航学院副研究员. 主要研究方向为空间精密载荷振动隔离/抑制, 精密结构/机构设计及控制. E-mail: liweipeng@buaa.edu.cn
刘泽书
北京航空航天大学宇航学院博士研究生. 主要研究方向为精密机构设计及控制, 卫星激光通信. E-mail: liuzs1@buaa.edu.cn
包泽宇
北京航空航天大学宇航学院博士研究生. 主要研究方向为卫星制造, 激光通信. E-mail: baozeyu@buaa.edu.cn
乔建忠
北京航空航天大学自动化学院教授. 主要研究方向为故障诊断与容错控制, 抗扰动控制和微小卫星姿态控制. E-mail: jzqiaobuaa@126.com
朱玉凯
北京航空航天大学宇航学院副教授. 主要研究方向为抗扰动控制, 滑模控制和航天器姿态控制. 本文通信作者. E-mail: yukaizhu@buaa.edu.cn
https://blog.sciencenet.cn/blog-3291369-1518138.html
上一篇:“结构−内容”框架下融合时空特征的技术预测模型
下一篇:基于大模型量化突发事件影响的工业能源价格预测研究