博文
基于信息融合的智能网联汽车安全交互决策
|
引用本文
黄昭彦, 杨烁, 吴建华, 范佳琦, 田炜, 殷翔, 方浩, 褚洪庆, 高炳钊. 基于信息融合的智能网联汽车安全交互决策. 自动化学报, 2025, 51(9): 1883−1898 doi: 10.16383/j.aas.c240680
Huang Zhao-Yan, Yang Shuo, Wu Jian-Hua, Fan Jia-Qi, Tian Wei, Yin Xiang, Fang Hao, Chu Hong-Qing, Gao Bing-Zhao. Safety interactive decision-making for intelligent connected vehicles based on information fusion. Acta Automatica Sinica, 2025, 51(9): 1883−1898 doi: 10.16383/j.aas.c240680
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240680
关键词
智能网联系统,自动驾驶,信息融合,交互决策
摘要
在开放交通场景, 智能网联汽车仍然存在安全可信性弱、交互属性不足等关键瓶颈问题. 随着人工智能(AI)的发展和深度学习的突破, AI模型在自动驾驶领域取得显著成果, 可以应用于自动驾驶中的场景理解和推理. 本文对基于信息融合的智能网联汽车安全交互决策研究进行综述, 首先梳理开放场景交通感知和理解方面的研究, 然后探讨具有社会交互属性的决策规划模型, 最后总结针对AI模型幻觉的安全验证技术. 通过结合三方面研究, 充分利用AI模型的强大能力实现“熟练司机”驾驶技能, 并讨论安全保障技术, 弥补AI模型“偶尔犯错”的不足, 有望解决自动驾驶安全长尾问题, 进一步推动自动驾驶技术的发展.
文章导读
作为典型的自主智能无人系统, 智能网联汽车已成为国际人工智能(Artificial intelligence, AI)战略竞争新高地. 2020年1 月8日, 美国发布“Ensuring American Leadership in Automated Vehicle Technologies Automated Vehicles 4.0”报告, 强调自动驾驶技术对抢占科技制高点的战略意义. 2023年12月5日, 我国交通运输部印发了 《自动驾驶汽车运输安全服务指南(试行)》, 首次从国家政策层面明确智能网联汽车可以用于运输经营活动, 为中国自动驾驶技术的商业化应用按下“加速键”.
商业运营无人车群是智能网联汽车落地实施的典型应用场景. 截至2023年, 我国已开放17个测试示范区、16个“双智”试点城市、7个国家车联网示范区, 装配路侧网联设备7000余台套, 自动驾驶出租车、无人巴士、自主代客泊车、干线物流以及无人配送等多场景示范应用有序展开[1]. 目前中国无人车群商业模式以测试、试运营为主, 预计2025年可实现规模化运营, 2030年实现常态化运营. 百度已在北上广深等30余地开放试运营, 累计测试里程超4500万公里, 2023年在全国范围内增加投放200台全无人驾驶运营车辆, 总规模3000 辆, 服务于300万个用户; AutoX拥有1000多台运营车辆、5大研发中心、10大运营中心、1个超级工厂, 其第5代Robotaxi车辆共搭载50个传感器, 包含4D 成像毫米波雷达、6颗激光雷达, 算力高达2200 TOPS, 能够实现车内全无人的安全驾驶 1.
当前及未来相当长的一段时间内, 商业运营无人车群与其他交通参与者共同构成异质混合车流, 属于典型的车联网信息物理系统(Cyber-physical systems, CPS). 网联车辆通过车与车(V2V)、车与交通设施(V2I)、车与行人(V2P)等通信方式共同构成一个高度互联互通、动态自适应的交通网络. 智能网联自动驾驶汽车在局部交通流中与人类司机和其他交通参与者进行交互博弈, 从而顺利完成驾驶任务. 尽管智能网联车辆技术发展迅猛, 开放交通场景道路中智能网联自动驾驶汽车仍未达到人类驾驶水平[2]. 目前的系统在高速公路上表现出色, 并且正逐渐适应复杂的城市道路环境, 能够实现完全自主导航、变道、停车以及应对复杂路口. 然而, 在开放且复杂的场景中, 人们普遍认为, 通过监督学习训练的端到端人工智能模型仍需人工接管[3]. 目前行业领先的接管里程数(MPI)与人类驾驶员相比仍存在巨大差距: 2023 年, Waymo 报告接管里程数为每次27859 km[4], 而特斯拉的 FSD V12.3.6 报告的接管里程数为每次 449 km[5]. 相比之下, 美国驾驶员平均每百万英里发生 1.86 起事故(即每起事故间隔 865238 km)[6], 在凤凰城和旧金山, 这一数据为每百万英里发生 4.85 起事故(即每起事故间隔 330000 km)[7]. 这表明接管里程数与人类驾驶事故率之间存在 10 ~ 100 倍的差距, 虽然将每次干预间隔里程数与事故里程进行比较可能并不完全公平, 但实现无需干预的人类水平驾驶, 将意味着自动驾驶汽车的智能真正达到了人类驾驶员的能力. 当前开放交通场景道路中智能网联自动驾驶汽车渗透率的提升仍面临安全可信、社会交互等挑战.
在安全可信方面: 现有的自动驾驶技术对未知边缘场景的信息融合与场景理解能力有限, 极大地限制着自动驾驶的进一步发展[8]. 2023年8月15日, 一辆Cruise无人出租车误驶入施工铺路工地, 前轮陷入未干的混凝土中, 无法移动. 同年8月17日, 一辆载有乘客的Cruise 无人出租车与一辆正赶往火灾现场执行任务的消防车发生碰撞, 导致乘客受伤. 未知不安全场景区域是自动驾驶系统安全风险的主要来源, 解决其功能需求无法定义、安全性能难以量化评价的问题, 是实现智能网联汽车安全可信的关键[9]. Bozga等[10]曾指出: “当前的自动驾驶系统集成了无法解释的AI组件, 缺乏足够严谨的设计方式, 无法应对高动态交互环境带来的巨大复杂性. 鉴于潜在的经济和社会风险, 迫切需要足够的证据来证明这些系统确实安全可靠.”
在社会交互方面: 自动驾驶车辆如何预测周围交通参与者的意图, 并实现具有社会兼容性的博弈交互和行为规划是极具挑战的[11]. 目前的自动驾驶运营车辆在这些方面确有欠缺, 时而为了安全目标过于保守长时等待, 时而过于激进与其他交通参与者抢行. 调查报告表明, 公众对自动驾驶运营车辆行为怀有很强的不信任感, 有60%的受访人员不相信自动驾驶车辆的安全性和可靠性, 尤其是在行人穿过马路场景, 更担忧自动驾驶车辆会冲撞行人引发安全事故[12]. 从系统工程的角度, 这个问题属于人与AI编组的交互问题, 2023 年美国人工智能研发战略计划[13]指出, 如何开发交互和协作的新架构, 培养人与AI之间的信任, 是未来重要的研究方向.
然而, 智能网联车辆安全、交互、效率等方面问题的解决具有一定冲突性: 基于机理解析的开发模式具有很好的可解释性, 但是感知与规划的性能指标面临天花板, 社会交互生硬, 通行效率低下; 基于AI驱动的开发模式驾驶技能水平更高, 与人类驾驶习惯更为吻合, 但是算法可解释性不强, 大规模神经网络的输出存在出错概率. 为此, 行业最新发展趋势是结合机理驱动与AI驱动两方面优势, 首先通过AI驱动算法实现“熟练司机”感知决策的驾驶技能, 进而针对AI 模型的不可解释性及幻觉问题, 通过机理驱动算法对“偶尔犯错”的AI算法进行安全验证和备用轨迹规划. 本文融合各领域研究, 提出基于信息融合的智能网联汽车安全交互决策技术路线, 充分利用AI模型的强大能力实现“熟练司机”驾驶技能, 同时采用安全保障技术弥补AI模型“偶尔犯错”的不足, 有望解决自动驾驶安全长尾问题. 下面围绕该前沿技术路径, 对感知、规划、安全验证等方面展开全面阐述.
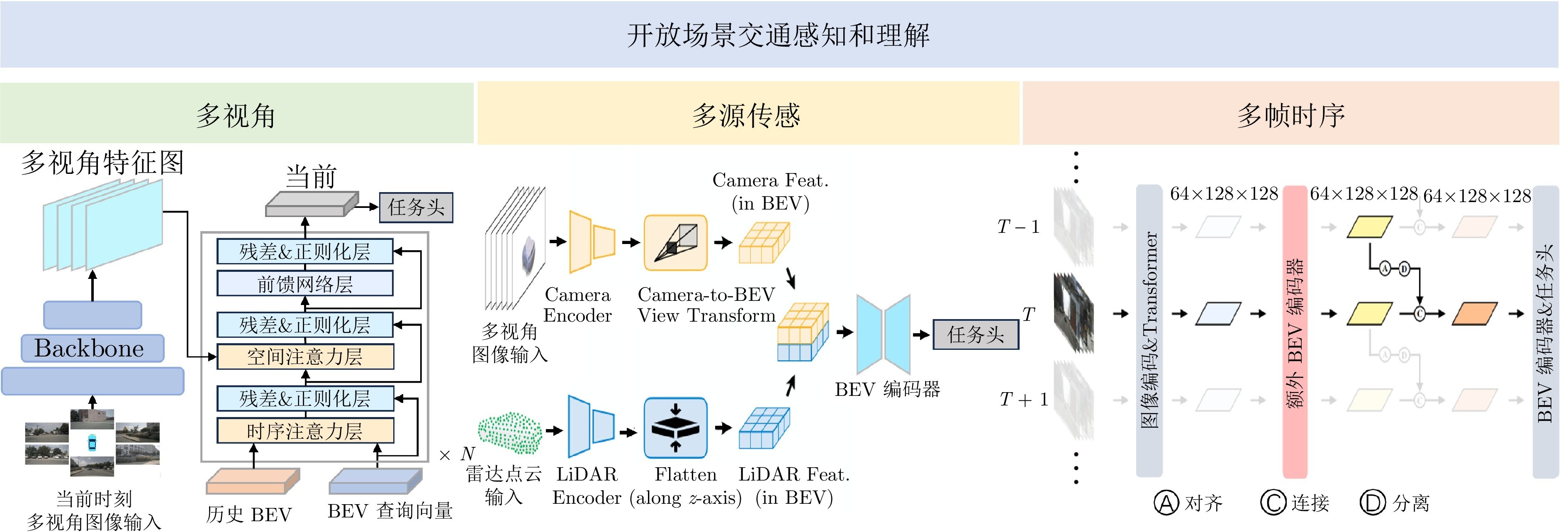
图1 开放场景交通感知和理解结构
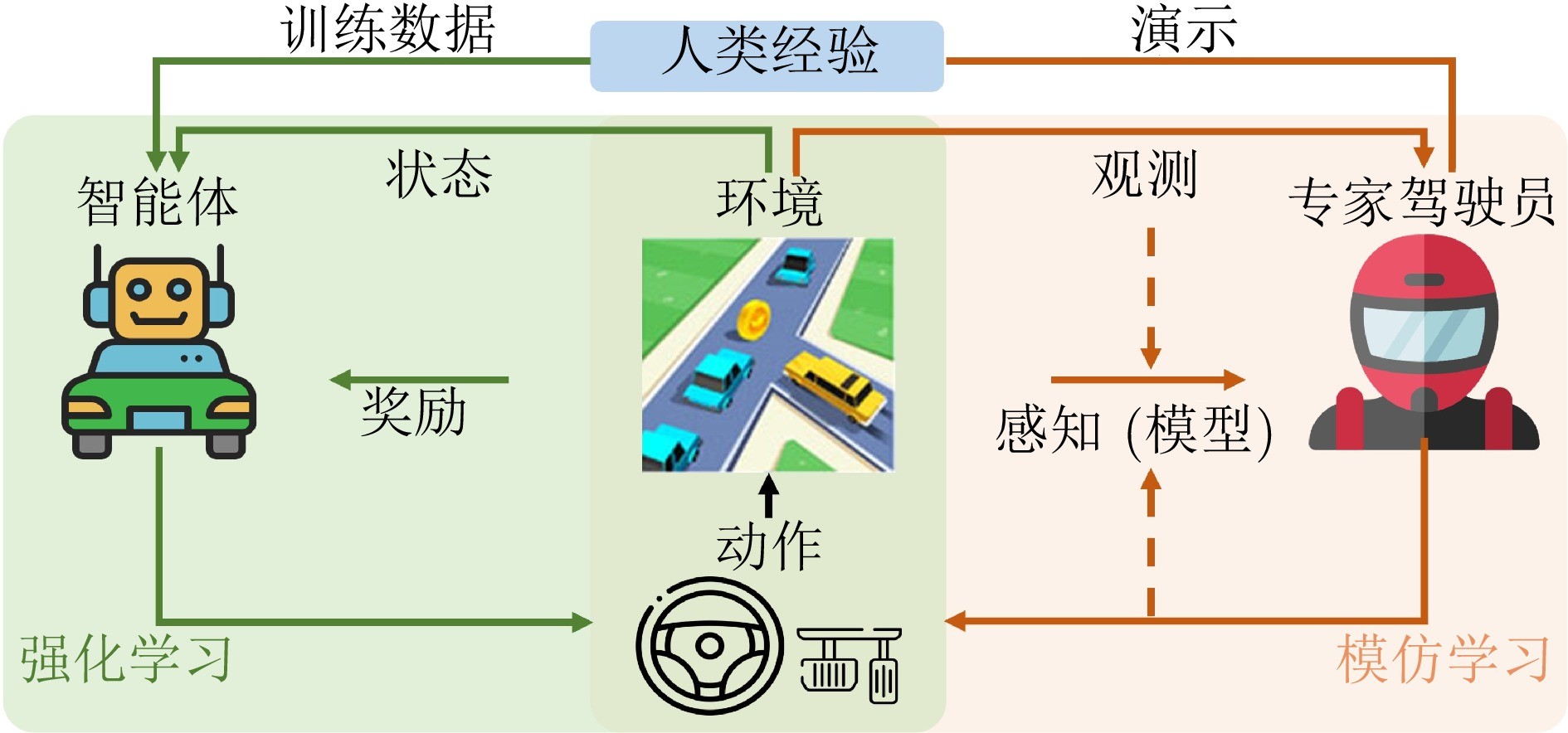
图2 基于强化学习/模仿学习的端到端自动驾驶体系结构

图3 端到端自动驾驶规划框架
纵观当前智能网联汽车的研究进展, 基于信息融合的安全交互决策技术已成为焦点, 但仍面临多项挑战. 包括在无需高精地图支持下, 如何有效利用传感信息构建局部语义地图, 加强信息融合; 如何在复杂交通中融入社会交互属性, 提高决策规划的推理与泛化能力; 以及如何实现高效的安全验证与备用轨迹规划, 保证无人驾驶系统的安全性. 这些关键问题的解决, 是自动驾驶技术未来研究的重点, 也是智能汽车向更高级自动化迈进的关键所在. 应对以上挑战, 首先需要提升数据的质量和多样性, 培养模型的时空感知能力. 其次, 可以通过人类反馈微调、思维链推理框架等方法提高模型的安全性. 最后, 应采用高效的测试和验证手段, 验证模型的安全性能是否真正达到安全准则. 随着技术的不断进步, 未来有望突破这些瓶颈, 推动智能网联汽车向更安全、可信、高效的方向发展.
作者简介
黄昭彦
同济大学汽车学院博士研究生. 主要研究方向为自动驾驶安全决策与规划. E-mail: huangzhaoyan@tongji.edu.cn
杨烁
宾夕法尼亚大学电气与系统工程系博士研究生. 主要研究方向为控制理论, 形式化方法. E-mail: yangs1@seas.upenn.edu
吴建华
同济大学汽车学院硕士研究生. 主要研究方向为端到端的自动驾驶, 视觉−语言−行动模型. E-mail: 2332980@tongji.edu.cn
范佳琦
同济大学上海自主智能无人系统科学中心博士研究生. 主要研究方向为自动驾驶场景理解, 视觉语言模型. E-mail: fanjq@tongji.edu.cn
田炜
同济大学汽车学院副教授. 主要研究方向为自动驾驶感知与预测技术. E-mail: tian-wei@tongji.edu.cn
殷翔
上海交通大学自动化与感知学院教授. 主要研究方向为系统与控制理论, 自主系统和可信人工智能. E-mail: yinxiang@sjtu.edu.cn
方浩
北京理工大学自动化学院教授. 主要研究方向为多智能体协同决策与控制, 智能无人系统的多传感器融合SLAM和可信群体智能中的形式化方法. E-mail: fangh@bit.edu.cn
褚洪庆
同济大学汽车学院副教授. 主要研究方向为网联新能源汽车经济性驾驶策略, 人类驾驶数据引导的汽车安全决策和数据机理混合增强的车辆运动控制. E-mail: chuhongqing@tongji.edu.cn
高炳钊
同济大学汽车学院教授. 主要研究方向为汽车动力传动系统优化, 汽车控制与智能化. 本文通信作者. E-mail: gaobz@tongji.edu.cn
https://blog.sciencenet.cn/blog-3291369-1505228.html
上一篇:《自动化学报》2025年51卷9期目录分享
下一篇:面向智能生化实验室的机器人感知、规划与控制技术