博文
多智能体系统协同互估计与控制一体化框架
|
引用本文
段志生, 吕跃祖, 段培虎, 杨莹, 王金枝, 温广辉. 多智能体系统协同互估计与控制一体化框架. 自动化学报, 2025, 51(10): 2359−2370 doi: 10.16383/j.aas.c250290
Duan Zhi-Sheng, Lv Yue-Zu, Duan Pei-Hu, Yang Ying, Wang Jin-Zhi, Wen Guang-Hui. Integrated framework for cooperative mutual estimation and control in multi-agent systems. Acta Automatica Sinica, 2025, 51(10): 2359−2370 doi: 10.16383/j.aas.c250290
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250290
关键词
多智能体系统,状态互估计,一体化框架,传感器受损,协同控制
摘要
尽管多智能体系统协同控制已有广泛研究, 现有分布式控制算法在个体传感器受损情况下仍存在性能下降问题. 提出一种协同互估计与控制一体化设计新框架, 通过充分利用个体传感器对其他智能体的测量信息, 提升多智能体系统协同控制的弹性能力. 首先, 对整个多智能体系统构建分布式传感网络模型. 其次, 基于既定的协同控制任务, 建立个体对整体控制输入的预测估计; 进一步设计全局整体测量输出的分布式一致性追踪估计器. 然后, 利用整体控制输入预测和整体测量输出追踪, 设计局部观测器实现整体状态估计. 此外, 将所提的一体化设计框架应用于线性多智能体系统协同一致性控制问题, 提出反馈增益的联合设计方法, 从理论上验证了所提框架的有效性. 仿真结果进一步表明, 该框架能够适用于多智能体系统部分传感器受损情形下的协同控制任务. 最后, 探讨协同互估计与控制一体化框架的未来研究方向.
文章导读
随着无人化技术的迅猛发展, 以无人机、无人车为代表的智能体逐步在农业、物流等领域得到广泛应用[1]. 面对复杂多变的实际场景, 单个智能体因其载荷能力、感知通信和能源供给等方面的限制, 在此背景下, 多个智能体通过信息交互协同合作所构成的多智能体系统[2], 成为国内外研究关注的热点. 蚁群优化提出者Dorigo[3]在2021年发表的观点性文章中指出, 集群是机器人领域最具前景的研究方向之一.
多智能体系统研究的核心问题之一是协同控制, 系指各智能体设计仅基于邻居之间局部交互信息的分布式控制算法, 实现既定的协同目标. 该研究范畴广泛, 涵盖一致性控制[4−5]、编队控制[6−7]、汇聚[8−9]、覆盖控制[10]等典型任务. 在过去二十年中, 研究者围绕多智能体系统的不同动力学模型、通信拓扑结构及控制律形式等多个维度, 提出大量分布式控制算法. 具体而言, 智能体动力学模型从最初的积分器系统[4−5, 11−12], 逐步扩展到线性系统[13−15], 再到更复杂的非线性系统[16−19]; 通信拓扑结构从无向图[20−21]发展到有向图[22−23]及切换拓扑[24−25]; 控制律形式从传统的状态反馈[4−5]、输出反馈[13, 26]演化到自适应控制[27−29]、抗饱和控制[30−32]以及事件触发控制[33−35]等多种形式的非线性控制方法.
多智能体系统分布式控制算法普遍依赖于个体间交互的状态估计信息, 因此, 个体状态的准确估计是多智能体系统实现协同控制的前提. 现有研究大多基于以下两类策略: 一是利用个体自身传感器测量信息估计自身状态, 并通信交互状态估计信息, 从而形成分布式控制输入; 二是直接交互传感器测量信息, 再基于相对测量信息估计协同误差, 从而形成分布式控制输入. 这两类方法均默认传感器处于正常工作状态. 然而, 在复杂环境, 尤其是恶劣环境下, 个体传感器常受到强干扰影响, 导致测量精度下降, 甚至完全失效, 从而使得现有分布式控制方法失效. 因此, 亟须建立新的分布式控制框架, 以保障个体传感器受损情形下的协同控制性能.
本文建立一种多智能体系统协同互估计与控制一体化的新框架, 以解决个体传感器失效情形下的协同控制问题. 注意到, 个体的传感器不仅能测量自身的部分状态信息, 还能够感知其他智能体的部分状态. 例如, 无人机可通过视觉传感器获取附近无人机的相对位置, 并结合北斗等定位手段解算出其他无人机的绝对位置信息. 然而, 在现有的分布式控制方法中, 此类个体对其他智能体的测量信息往往被直接忽略, 未被有效利用. 鉴于此, 本文将每个智能体的测量输出统一建模为整个多智能体系统全局状态的函数, 将多智能体系统整体建模为分布式传感网络模型, 从而充分利用其他智能体的传感器测量信息, 对每个个体建立对多智能体系统整体状态的分布式互估计. 与现有的分布式状态估计问题相比, 本文面临的主要挑战在于, 个体无法直接获取多智能体系统整体控制输入, 需要额外考虑整体未知输入对分布式状态估计的影响. 本文考虑将分布式状态估计与分布式协同控制进行关联, 建立分布式互估计与控制一体化设计框架. 具体而言, 该框架包含三个部分: 一是利用个体对多智能体系统整体状态的估计, 对面向协同任务的既定全局整体控制输入进行预测估计; 二是设计分布式一致性估计器, 对所有智能体的测量输出进行一致性追踪; 三是基于全局整体测量输出追踪和全局整体控制输入预测, 设计局部状态观测器, 以实现对多智能体系统整体状态的估计. 最后, 本文将该一体化框架应用于线性多智能体系统协同一致性控制中, 并进一步探讨其在复杂场景下的未来发展方向.
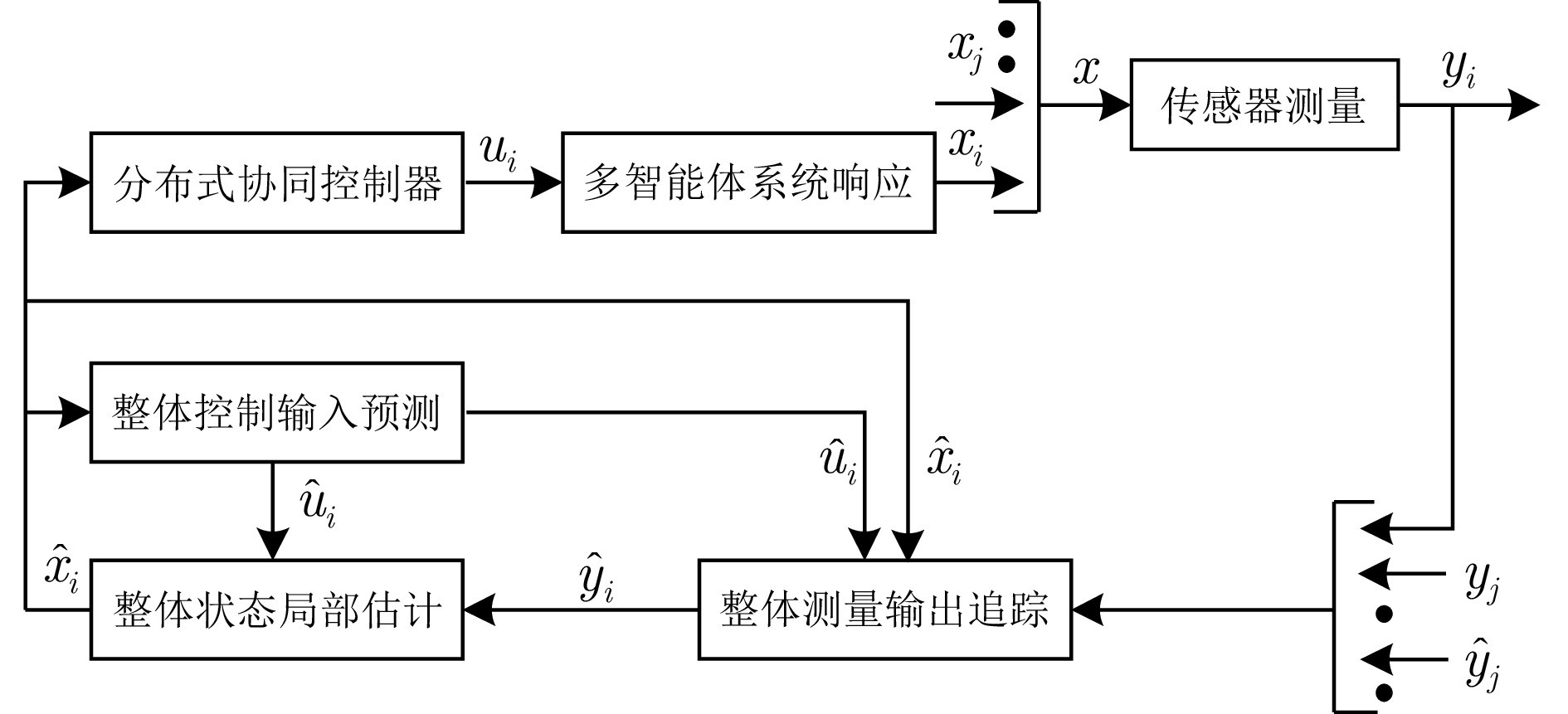
图1 输入预测–输出追踪的分布式互估计与控制 一体化框架
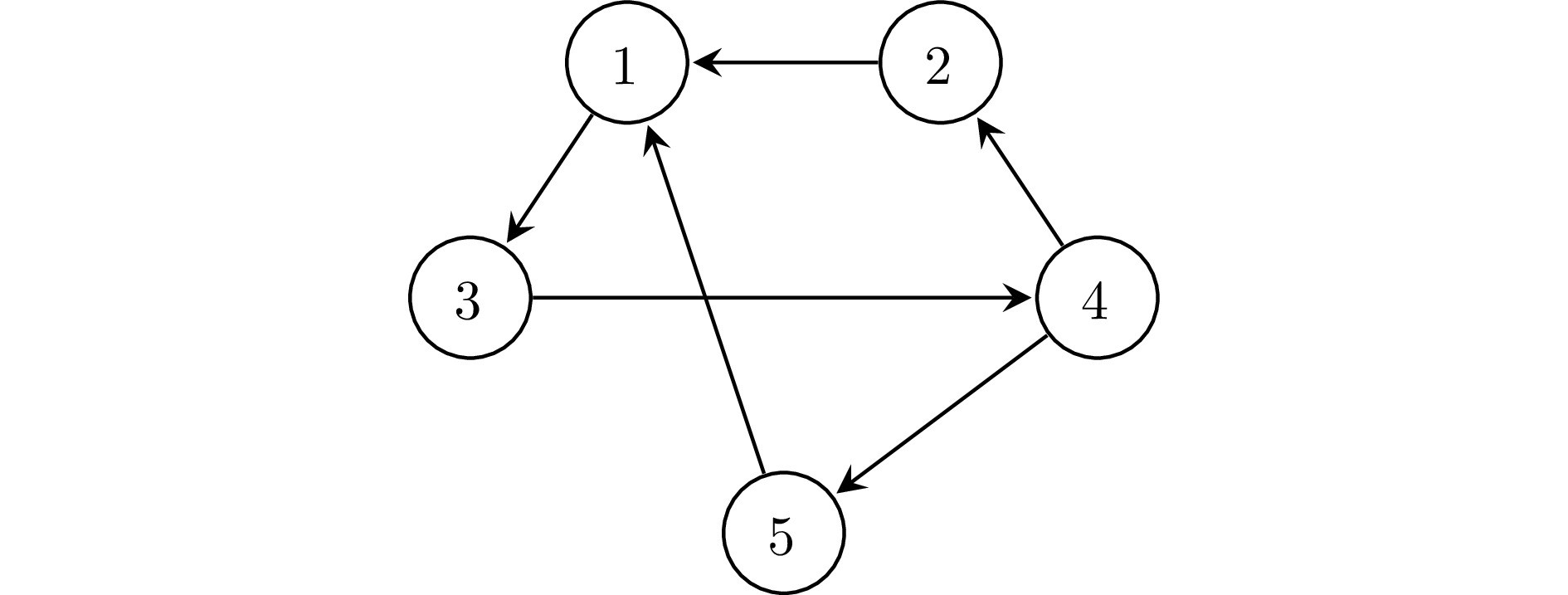
图2 强连通拓扑图
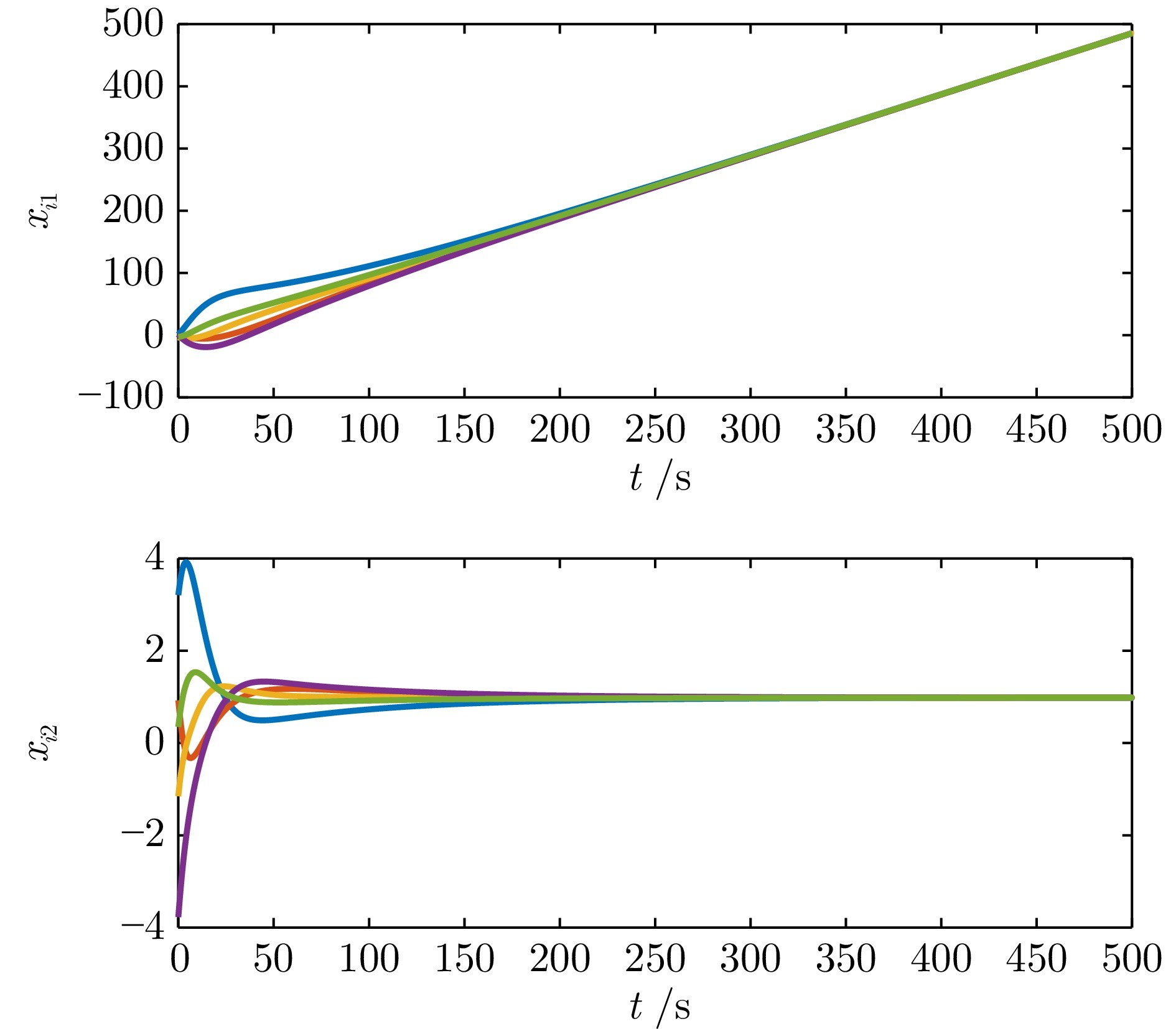
图5 多智能体系统状态分量xi1和xi2的轨迹趋于一致
本文提出多智能体系统协同互估计与控制一体化框架. 该框架充分利用个体传感器对其他智能体状态的测量信息, 将多智能体系统建模为分布式传感网络模型, 并对每个智能体构建全局整体控制输入的预测机制与全局整体测量输出的一致性追踪, 从而将智能体对其他个体状态的互估计与分布式协同控制关联耦合设计, 建立确保协同任务实现的反馈增益选取的充分性条件. 所提出的协同互估计与控制一体化框架应用于线性多智能体系统协同一致性控制中, 理论分析与仿真实验均验证了其在部分传感器失效情形下的有效性. 最后, 本文进一步剖析协同互估计与控制一体化框架的未来发展方向和关键挑战.
作者简介
段志生
北京大学先进制造与机器人学院教授. 2000 年获得北京大学力学与工程科学专业博士学位. 主要研究方向为复杂网络与关联耦合系统. E-mail: duanzs@pku.edu.cn
吕跃祖
北京理工大学人工智能学院教授. 2018 年获得北京大学力学系统与控制专业博士学位. 主要研究方向为多智能体系统协同控制. E-mail: yzlv@bit.edu.cn
段培虎
北京理工大学人工智能学院教授. 2020 年获得北京大学力学系统与控制专业博士学位. 主要研究方向为多智能体系统分布式状态估计. E-mail: duanpeihu@bit.edu.cn
杨莹
北京大学先进制造与机器人学院教授. 2003 年获得北京大学力学与工程科学专业博士学位. 主要研究方向为故障诊断与容错控制. E-mail: yy@mech.pku.edu.cn
王金枝
北京大学先进制造与机器人学院教授. 1998 年获得北京大学一般力学专业博士学位. 主要研究方向为多智能体系统分布式协调控制. E-mail: jinzhiw@pku.edu.cn
温广辉
东南大学自动化学院教授. 2012 年获得北京大学力学系统与控制专业博士学位. 主要研究方向为网络群体智能与多智能体系统分布式控制. 本文通信作者. E-mail: ghwen@seu.edu.cn
https://blog.sciencenet.cn/blog-3291369-1512657.html
上一篇:网络攻击下多智能体系统攻击检测设计与分布式弹性控制
下一篇:《自动化学报》2025年51卷11期目录分享