博文
[转载]领导者速度未知的二阶智能体方位编队控制
||
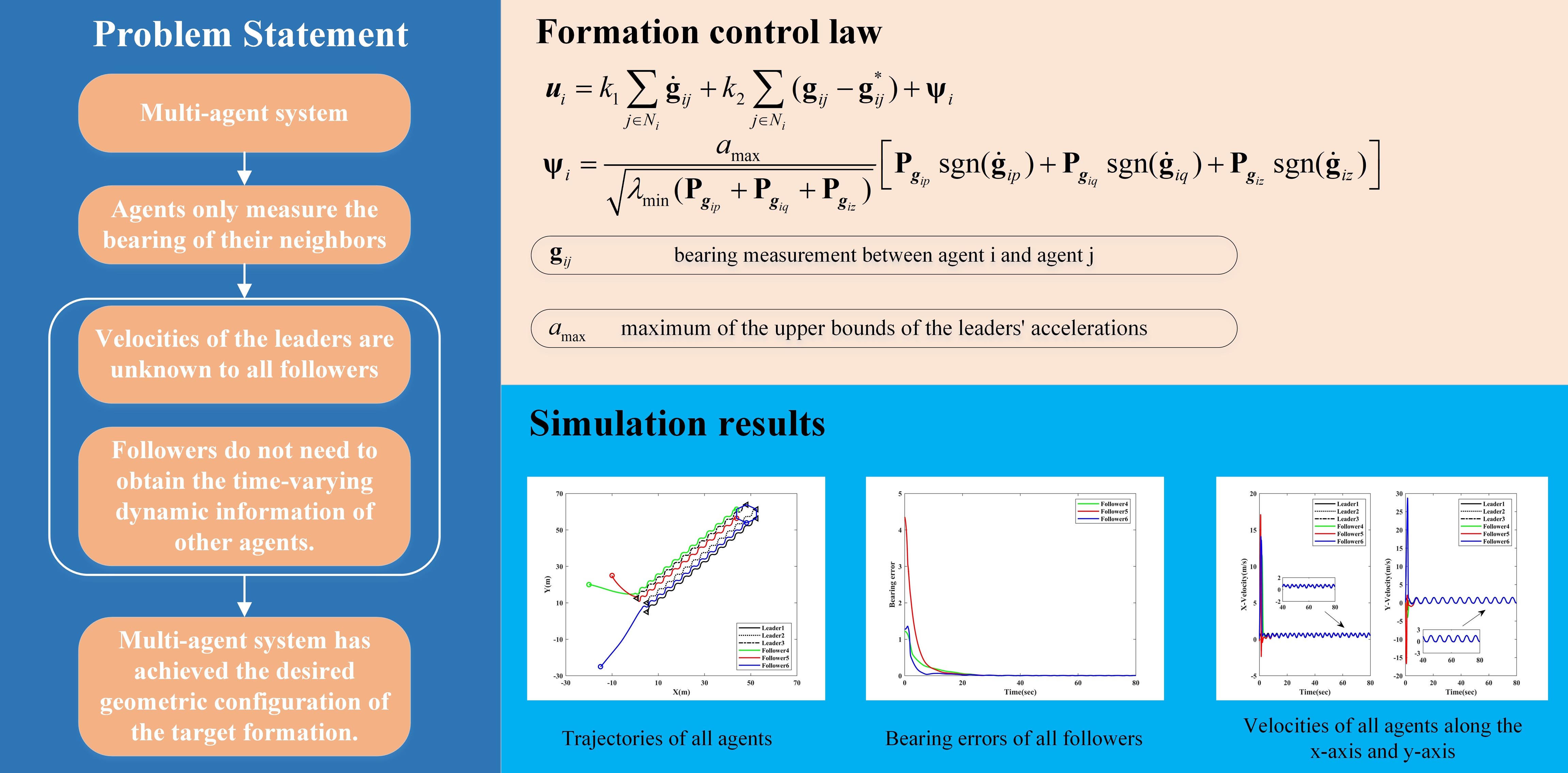
领导者速度未知的二阶智能体方位编队控制
赵云杰1,王晶1,窦立亚2,鞠爽3
(1. 北方工业大学 电气与控制工程学院,北京100144;2. 北京化工大学 信息科学与技术学院,北京100029;3. 石家庄铁道大学 电气与电子工程学院,石家庄 050043)
摘要:研究领导者以时变速度运动场景下,基于方位测量的二阶智能体编队控制问题。不同于已有方法需要跟随者获取领导者的速度信息,领导者的时变速度对于所有跟随者是完全未知的。利用智能体对邻居的方位测量与方位向量的导数,提出了一种基于方位的编队控制算法。控制律的设计仅需要领导者们加速度上界的最大值,并实现了目标编队的期望几何构型。使用李雅普诺夫定理证明了多智能体系统的稳定性。数值仿真的结果验证了所提出控制律的有效性。
关键词:编队控制,二阶智能体,未知速度,方位测量
扫二维码浏览全文

Cite this article
Zhao, Y., Wang, J., Dou, L. et al. Bearing-Based Formation Control for Double-Integrator Agents with Unknown Velocities of Leaders. J. Shanghai Jiaotong Univ. (Sci.) (2025). https://doi.org/10.1007/s12204-025-2852-2
https://blog.sciencenet.cn/blog-45888-1509608.html
上一篇:[转载]小波启发的编码器模型及其在工业预测性维护中的应用
下一篇:[转载]UAE-Net:面向无人农机系统的非结构化农田道路识别语义分割算法

扫一扫,分享此博文