博文
[转载]UAE-Net:面向无人农机系统的非结构化农田道路识别语义分割算法
||
UAE-Net:面向无人农机系统的非结构化农田道路识别语义分割算法
陆丹腾1,朱亮2,邹丹平1,郁文贤1
(1. 上海交通大学 自动化与感知学院,上海200240;2. 上海华测导航技术股份有限公司,上海201706)
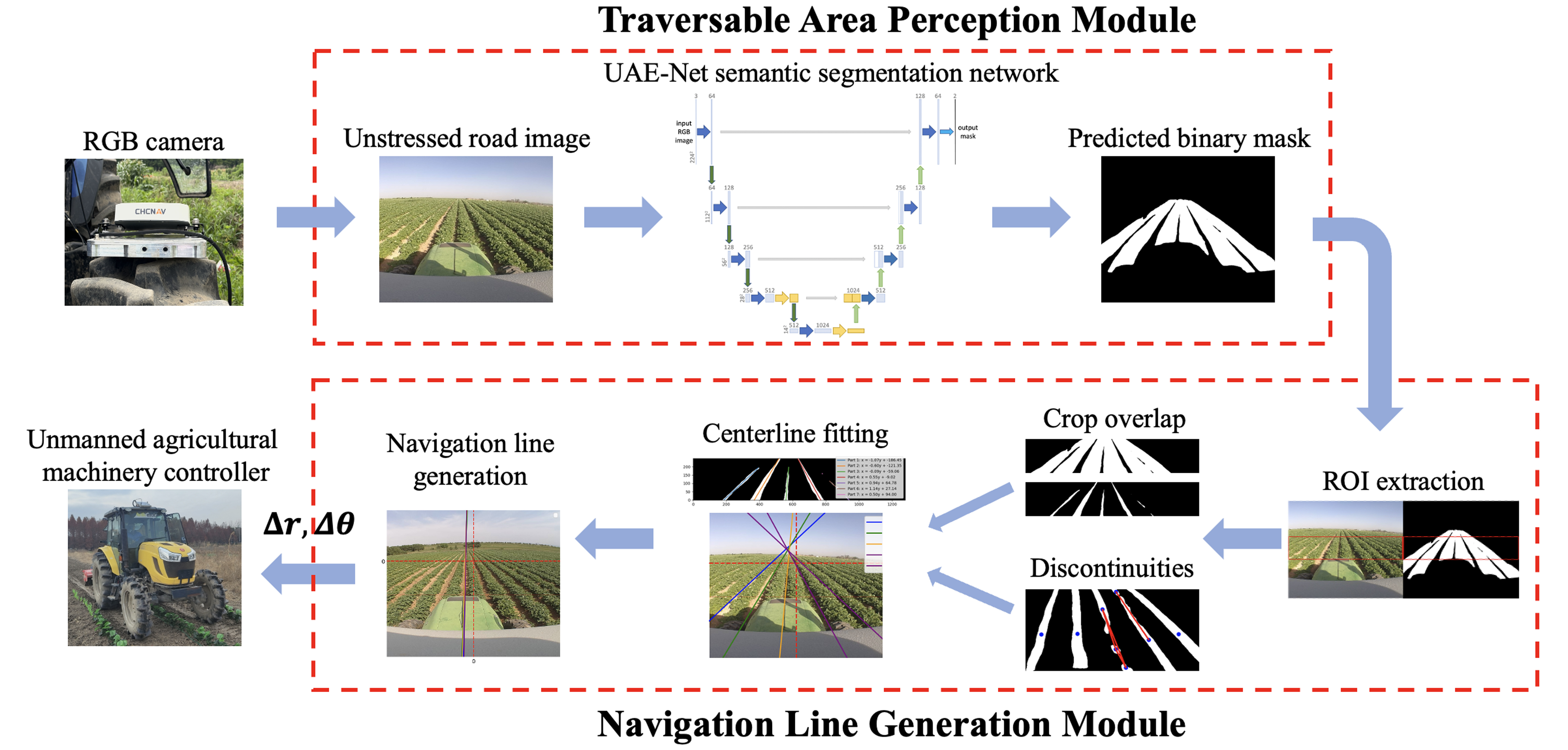
摘要:在智能农业领域中,非结构化道路识别对农机无人驾驶具有重要意义。目前道路检测的研究集中于结构化道路,而对非结构化道路的关注较少。农田道路作为一种常见的非结构化道路形式,其感知和导航仍然是一个巨大挑战。本文提出了一种新模型,解决了感知非结构化农田道路的各种复杂问题,并且满足农机平台的算力限制。该新模型引入高效的注意力机制,增强了模型的鲁棒性和分割性能,同时采用改进的逐点卷积和深度卷积结构,减少了模型的计算量和参数量。与现有模型相比,我们的模型在不同光照条件下表现出更强的鲁棒性,效率提高至现有模型的598%,同时分割精度也得到了提升。
关键词:无人农机系统,非结构化道路,语义分割,导航线生成,评测指标
扫二维码浏览全文

Cite this article
Lu, D., Zhu, L., Zou, D. et al. UAE-Net: A Semantic Segmentation-Based Algorithm for Unstructured Farm Road Recognition in Unmanned Agricultural Machinery System. J. Shanghai Jiaotong Univ. (Sci.) (2025). https://doi.org/10.1007/s12204-025-2862-0
https://blog.sciencenet.cn/blog-45888-1509782.html
上一篇:[转载]领导者速度未知的二阶智能体方位编队控制
下一篇:[转载]SemanticTrack:一种用于雷达点云鬼影抑制的运动目标检测与跟踪方法

扫一扫,分享此博文