博文
Drones:中山大学航空航天学院——四旋翼无人机智能自抗扰控制方法 (TD3-ADRC)
||
在无人机技术飞速发展的当下,四旋翼无人机因灵活的飞行特性,被广泛应用于军民诸多领域,但城市、山地等狭小空间的作业需求,以及飞行中不可避免的阵风等外部干扰,对其控制系统的抗扰性和控制精度提出了极高要求。传统控制方法存在参数调优依赖人工、抗扰能力不足等问题,难以满足复杂环境下的飞行控制需求。针对四旋翼无人机的抗扰问题,能够智能抗干扰的控制系统亟待研究。中山大学航空航天学院飞行器制导与控制课题组联合紫金山实验室在 Drones 期刊发表了文章“Intelligent Control for Quadrotors Based on a Novel Method: TD3-ADRC”,提出了一种融合双延迟深度确定性策略梯度 (TD3) 与自抗扰控制 (ADRC) 的新型智能控制算法——TD3-ADRC。该研究使用tanh函数改进了传统的ADRC控制算法,并结合TD3算法智能调整控制器参数,并进行了仿真实验和台架实验,验证了该算法在抗干扰方面的有效性,在飞行器智能控制算法方面做出了一定贡献。
研究过程与成果
作者在文中提出使用参数化tanh函数替代传统ADRC算法中的fal函数,传统fal函数在原点附近存在控制不连续、突变的问题,galn函数也在特定节点有跳变,而新提出的tanh函数全程连续平滑无分段切换,大误差时增益更低保障系统稳定性,小误差时增益更高提升控制精度,从根源上解决了传统非线性函数的缺陷,优化了控制信号的平滑性。进一步的,作者构建TD3-ADRC智能自抗扰控制框架,将TD3深度强化学习算法与改进后的ADRC深度融合。传统ADRC的性能高度依赖人工参数调优,且固定参数难以适配复杂多变的环境,而TD3算法凭借双Q网络、延迟策略更新、目标策略平滑三大改进,能有效解决DDPG等算法的过估计偏差问题,训练收敛更稳定。研究团队将其引入ADRC框架,让控制器可通过与环境的持续交互,自主学习并优化控制律参数,实现控制器参数的自适应调整,无需复杂人工调参,大幅提升了系统的环境适应性和抗扰鲁棒性。
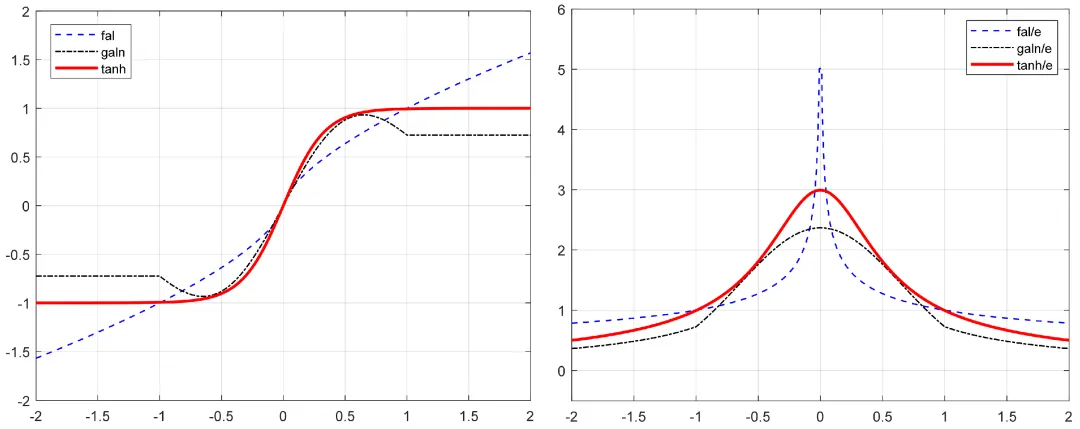
图1. 三种函数对比图
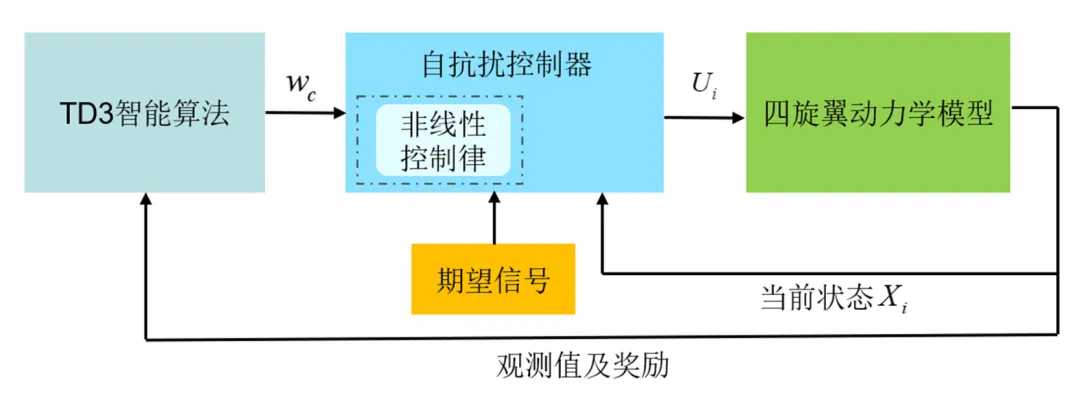
图2. TD3-ADRC控制结构框图
为了验证所提出的控制算法的有效性,作者完成了仿真验证与硬件台架测试。研究团队首先建立了X型四旋翼无人机的非线性动力学模型,设计了基于参数化tanh函数的跟踪微分器、扩张状态观测器和非线性状态误差反馈控制律;随后在Simulink中开展仿真,将TD3-ADRC与传统PID、常规ADRC、DDPG-ADRC进行对比,结果显示,TD3-ADRC在姿态跟踪的绝对误差积分 (IAE) 和均方根误差 (RMSE) 上表现最优,相较传统ADRC三通道控制精度最高提升37.28%,相较DDPG-ADRC最高提升19.43%;最后基于PX4飞控搭建了四旋翼无人机3自由度台架测试系统,测试结果表明,TD3-ADRC在俯仰、横滚通道的控制性能显著优于PID和线性ADRC,其中俯仰角正弦指令跟踪性能相较LADRC、PID分别提升61.6%、55.3%,即使在复杂扰动下,仍能实现高精度的姿态跟踪。此外,研究团队还通过蒙特卡洛方法完成了500次仿真验证,证明在参数调整范围内,TD3-ADRC闭环控制系统始终保持稳定,进一步验证了算法的鲁棒性。
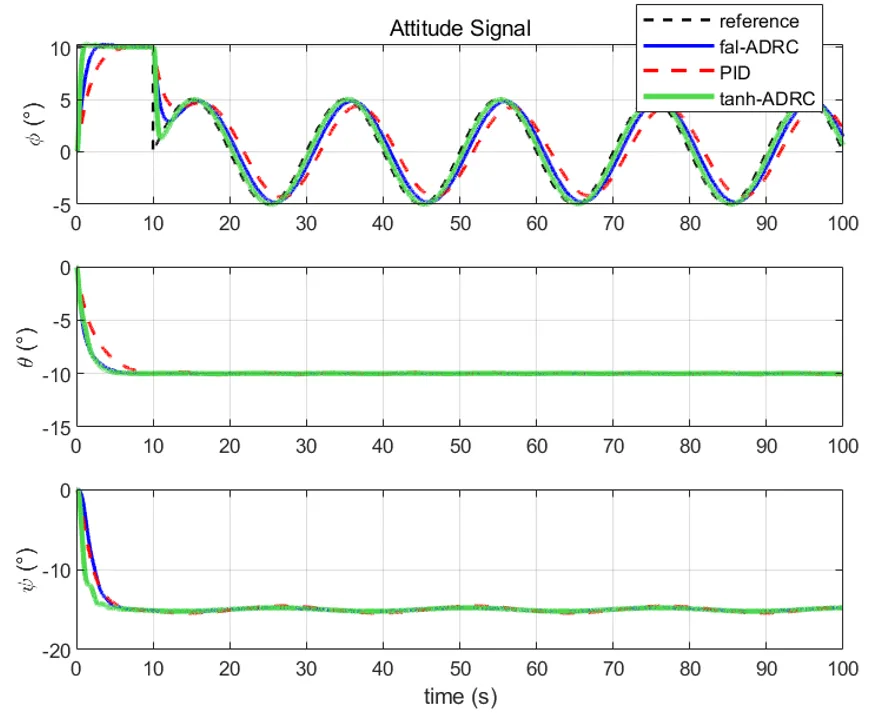
图3. 非智能方法仿真结果对比
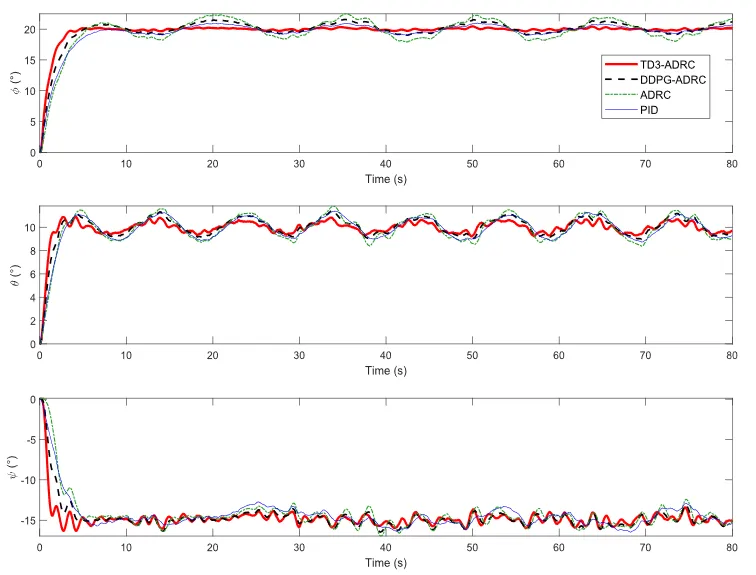
图4. 智能方法仿真结果对比
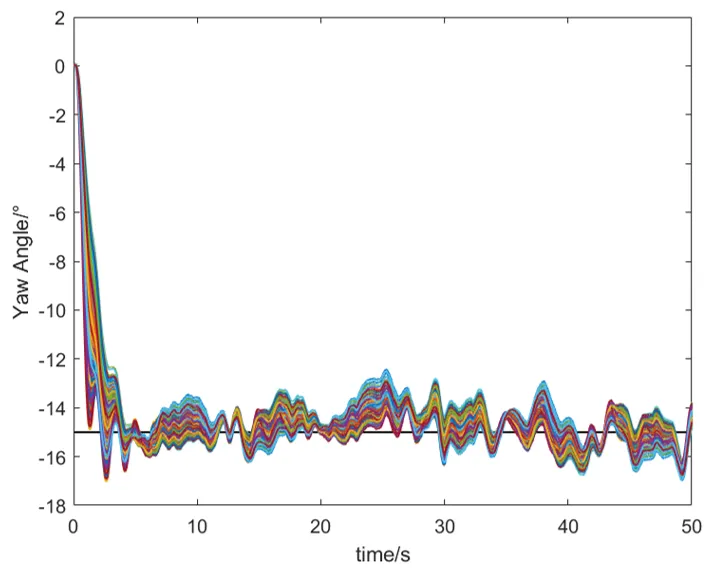
图5. 蒙特卡洛法稳定性验证
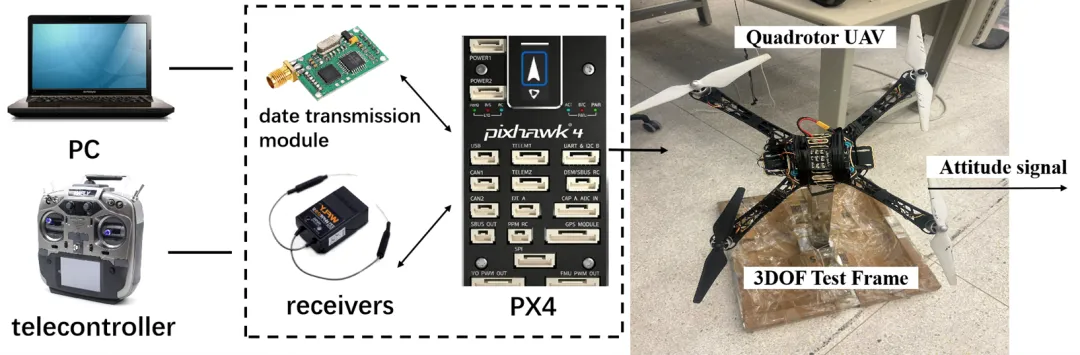
图6. 台架实验平台
研究总结
该研究的成果具有重要的理论与工程价值:一方面,通过参数化tanh函数改进了传统ADRC框架,解决了其控制不连续问题,提升了自抗扰控制的核心性能;另一方面,提出的TD3-ADRC算法丰富了智能抗扰控制方法体系,为无人机复杂扰动下的高精度控制提供了新范式,也为其他强耦合、欠驱动非线性系统的智能控制提供了参考思路。
未来,该算法有望进一步落地应用于无人机巡检、物流配送、应急救援等实际场景,提升无人机在复杂自然环境、复杂作业场景下的飞行稳定性和任务完成能力,推动无人机智能控制技术的工程化发展。
原文链接:https://www.mdpi.com/2504-446X/10/2/110
Drones 期刊介绍
主编:Diego González-Aguilera, University of Salamanca, Spain; Pablo Rodríguez-Gonzálvez, University of León, Spain
期刊主要涵盖无人机、无人机系统、远程驾驶航空器系统、水下无人机以及无人地面载具等相关的最新科学技术及应用。目前期刊已被 Scopus、SCIE (Web of Science)、Ei Compendex等权威数据库收录。
2024 Impact Factor:4.8
2024 CiteScore:7.4
Time to First Decision:20.8 Days
Acceptance to Publication:2.7 Days
期刊主页:https://www.mdpi.com/journal/drones
https://blog.sciencenet.cn/blog-3516770-1530718.html
上一篇:Lubricants 中国矿业大学朱少禹博士和合肥工业大学孙军教授主持特刊:轴承润滑的多物理场建模
下一篇:Inorganics 首届青年编委名单公布
