博文
合作−竞争广义不确定异构多智能体系统的二分输出一致
|
引用本文
张捷, 姚瑶, 王健安, 丁大伟, 李晓磊, 李志强. 合作−竞争广义不确定异构多智能体系统的二分输出一致. 自动化学报, 2025, 51(11): 2553−2568 doi: 10.16383/j.aas.c240750
Zhang Jie, Yao Yao, Wang Jian-An, Ding Da-Wei, Li Xiao-Lei, Li Zhi-Qiang. Bipartite output consensus of cooperative-competitive descriptor uncertain heterogeneous multi-agent systems. Acta Automatica Sinica, 2025, 51(11): 2553−2568 doi: 10.16383/j.aas.c240750
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240750
关键词
广义不确定系统,多智能体系统,协同输出调节,内模原理,二分输出一致
摘要
针对符号有向图下合作−竞争广义不确定异构多智能体系统的二分输出一致问题, 基于协同鲁棒输出调节原理提出新型分布式控制算法, 使得具有竞争关系和不同动态的两组智能体能够分别跟踪幅值相等、符号相反的外系统输出. 首先, 为实现对不确定系统参数的动态补偿, 引入基于外系统观测器的动态内模补偿器, 进而设计分布式状态反馈控制协议. 区别于传统协同输出调节问题, 通过将二分一致性问题转化为增广闭环广义系统的稳定性问题, 证明了在不依赖广义调节方程精确解的情况下, 提出的控制器能够实现小范围参数摄动下的二分输出跟踪. 其次, 在状态不可获知条件下, 通过重构动态内模补偿器, 设计分布式二分输出反馈控制协议. 最后, 通过仿真算例证明了所提出的分布式协同控制算法的有效性.
文章导读
近年来, 随着新一代信息技术、高端制造技术和人工智能技术的飞速发展, 多智能体系统的协同控制[1−3]已成为国内外学者的研究热点之一. 一致性作为协同控制的核心理论, 其主要目标是通过设计分布式控制算法, 使每个智能体的某一特征状态渐近收敛至相同值, 进一步可分为状态一致性问题和输出一致性问题. 例如, 文献[4]利用分布式自适应事件触发控制方法, 实现具有未知动态和外部干扰的高阶多智能体系统的状态一致性. 文献[5]针对受有向拓扑和干扰影响的多智能体系统, 研究有限时间领导跟随输出一致性问题.
传统一致性控制协议设计主要依赖智能体间的协同交互作用, 通常采用非负图进行描述. 然而, 竞争关系也广泛存在于生物网络[6]和社交网络[7]等复杂系统中, 因此通过引入负权重机制建立相应的协同算法. 例如, 在公交运输网络中, 公交车采用相同路线意味着竞争关系, 若乘客需要转乘才能抵达目的地则存在合作关系, 基于这种合作−竞争交互作用公交系统能够实现复杂高峰路况时的高效协同运输[8]. 在现代工业生产过程中, 每个子流程可归类为合作−竞争型群体, 参与大规模生产线的生产单元根据需要完成的多制造任务进行分组, 相比通用定点控制方案具有显著优势[9]. 在如图1所示的灾害救援场景中, 地面无人车与空中无人机共同组成合作−竞争分组系统, 其中无人机作为探测组用于快速扫描灾区的不同区域, 地面无人车将覆盖不同区域作为竞争目标, 同时作为运输组根据无人机扫描离场后生成的热力图运送物资实现协同救援. 因此, 探索竞争与合作关系共存下的多智能体系统协同控制具有重要意义. 为解决该类问题, Altafini于2012年在文献[10]中引入带有正、负权值的符号图并首次提出新型二分一致性概念. 作为传统一致性的重要延伸, 许多学者解决了符号图下的多种二分一致问题[11−13]. 例如, 文献[11]解决了模型参数不确定下多无人艇系统的固定时间二分编队跟踪控制问题. 在有向符号通信网络下, 文献[12]基于分布式估计器研究多欧拉−拉格朗日系统的固定时间二分一致性问题. 文献[13]提出分布式事件触发二分一致性策略并应用于多卫星编队. 然而, 上述文献中提出的控制协议主要用于实现同构多智能体系统的二分状态一致, 如何实现更复杂的异构动态下的二分输出一致仍是一个值得关注的方向.
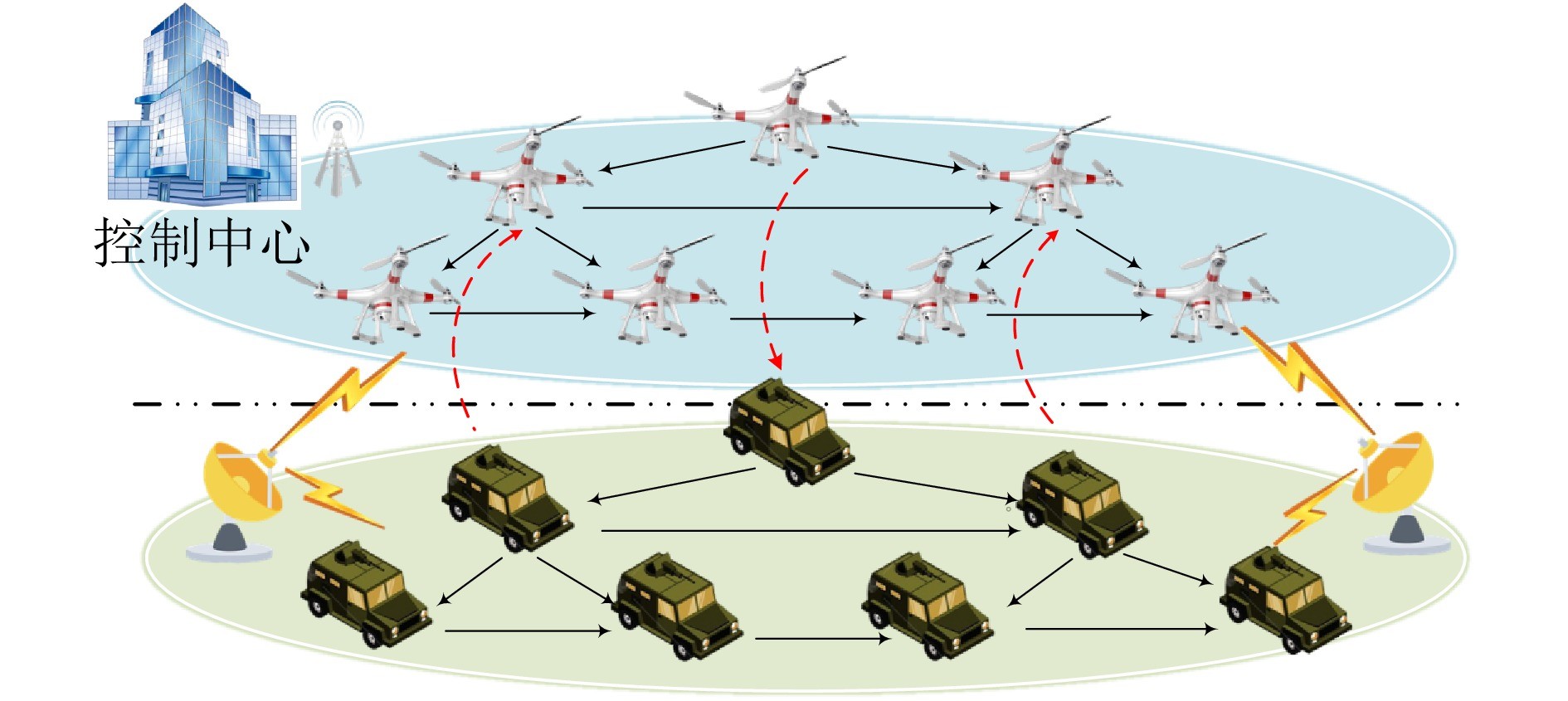
图1 地面无人车与空中无人机共同组成的协同救援
输出调节原理[14]是实现输出一致的一个有效方法. 将单个系统推广到多智能体系统时, 对应的输出跟踪问题称为协同输出调节问题[15]. 由于输出调节方法能够利用分离原理将反馈控制和前馈控制有效结合起来, 因此在实现异构动态的输出一致上有着独特优势. 基于此, 学者们针对更符合实际的合作−竞争异构多智能体系统, 解决了所谓的二分协同输出调节问题. 例如, 文献[16]基于状态反馈和输出反馈给出二分输出调节控制方法, 文献[17]通过自适应动态事件触发控制实现二分时变输出编队跟踪. 然而, 上述成果中需要依赖调节方程的精确解构造静态控制器, 难以应对系统存在参数不确定的扰动情形. 相对于协同输出调节中常用的前馈控制法, 内模法由于其能够有效处理参数不确定性问题更具优势. 例如, 文献[18]基于p-重内模原理解决了一类输出一致性问题, 文献[19]进一步实现了多领导者下的分布式输出包含控制. 然而, 上述文献难以实现更一般合作−竞争网络下的鲁棒输出调节. 特别地, 文献[20]研究符号有向图下一类线性不确定多智能体系统的二分输出调节问题. 然而, 该研究主要依赖邻居智能体间的输出交互, 没有引入外系统观测器, 难以适用更一般的一致性场景.
在实际情况中, 智能体间的合作可能会受通信限制和环境制约, 这些限制因素可以看作是一种代数约束. 因此, 相比于大多数文献主要研究的微分系统, 当耦合变量间存在代数约束或者同时含有变化较快及缓慢的因子时, 由微分−代数方程组成的具有广泛形式的广义系统(也称奇异系统或者隐式系统)更适合于描述实际物理系统, 如电路系统、地震预测装置、水上漂浮设备以及三连杆平面机械手等. 因此, 研究人员开始关注广义多智能体系统, 并得到诸多一致性结果[21−25]. 例如, 文献[21−22]基于观测器技术分别解决了线性和非线性广义同构多智能体系统的二分状态一致性问题. 相应地, 文献[23]基于输出调节原理实现广义异构多智能体系统的输出一致. 然而, 上述文献均基于传统非负通信拓扑图进行研究, 并未考虑合作−竞争关系共存情况下的复杂协同行为. 进一步, 文献[24]解决了合作−竞争广义异构连续多智能体系统的二分输出一致性问题. 文献[25]针对合作−竞争广义异构离散多智能体系统, 研究分布式二分输出编队控制问题. 然而, 针对更为复杂的广义不确定异构多智能体系统, 如何基于输出调节理论设计先进二分一致性控制策略, 在不依赖传统调节方程精确解的同时, 能够容忍足够小的不确定参数, 值得深入研究.
基于上述分析, 本文在更一般的符号有向拓扑图下, 考虑广义不确定异构多智能体系统的二分输出一致性问题. 区别于传统一致性问题, 通过引入p-重内模原理, 在结构平衡条件下, 利用正交变换法将增广闭环广义系统的二分一致性问题转化为鲁棒输出调节问题. 考虑只有部分跟随者能够得到外系统的跟踪信号, 设计相应的分布式外系统观测器, 进而基于状态反馈和输出反馈提出新型一致性控制器, 能够在不依赖传统无向图下拉普拉斯矩阵对称性和调节方程精确解情况下, 实现小范围不确定参数下的二分一致, 设计的控制协议也更具有普适性. 具体而言, 本文有如下创新点:
1) 针对具有广义异构动态、不确定参数和合作竞争交互的复杂多智能体系统, 研究一类分布式二分输出一致性问题, 能够在精确表征实际动态系统物理特性的同时, 满足复杂动态环境下的多任务需求.
2) 提出基于p-重内模和线性矩阵不等式的新型外系统观测器, 通过构建动态内模补偿器, 设计基于状态反馈和输出反馈的二分一致性控制协议, 能够实现对不确定性参数的动态补偿, 并且不依赖调节方程精确解.
3) 基于协同鲁棒输出调节理论构造广义不确定异构动态的二分输出一致框架, 通过去除符号有向图中竞争作用的负权值, 设计的控制协议能够易于推广并解决符号/非负拓扑下同构系统的二分/传统状态/输出一致性问题.
本文其余部分如下: 第1节给出符号说明、代数图论、问题描述和理论基础; 第2节基于输出调节和内模原理分别提出分布式状态反馈和输出反馈二分控制协议; 第3节给出仿真算例验证提出的两个分布式控制策略的有效性; 第4节总结本文并对未来进一步的研究方向进行展望.
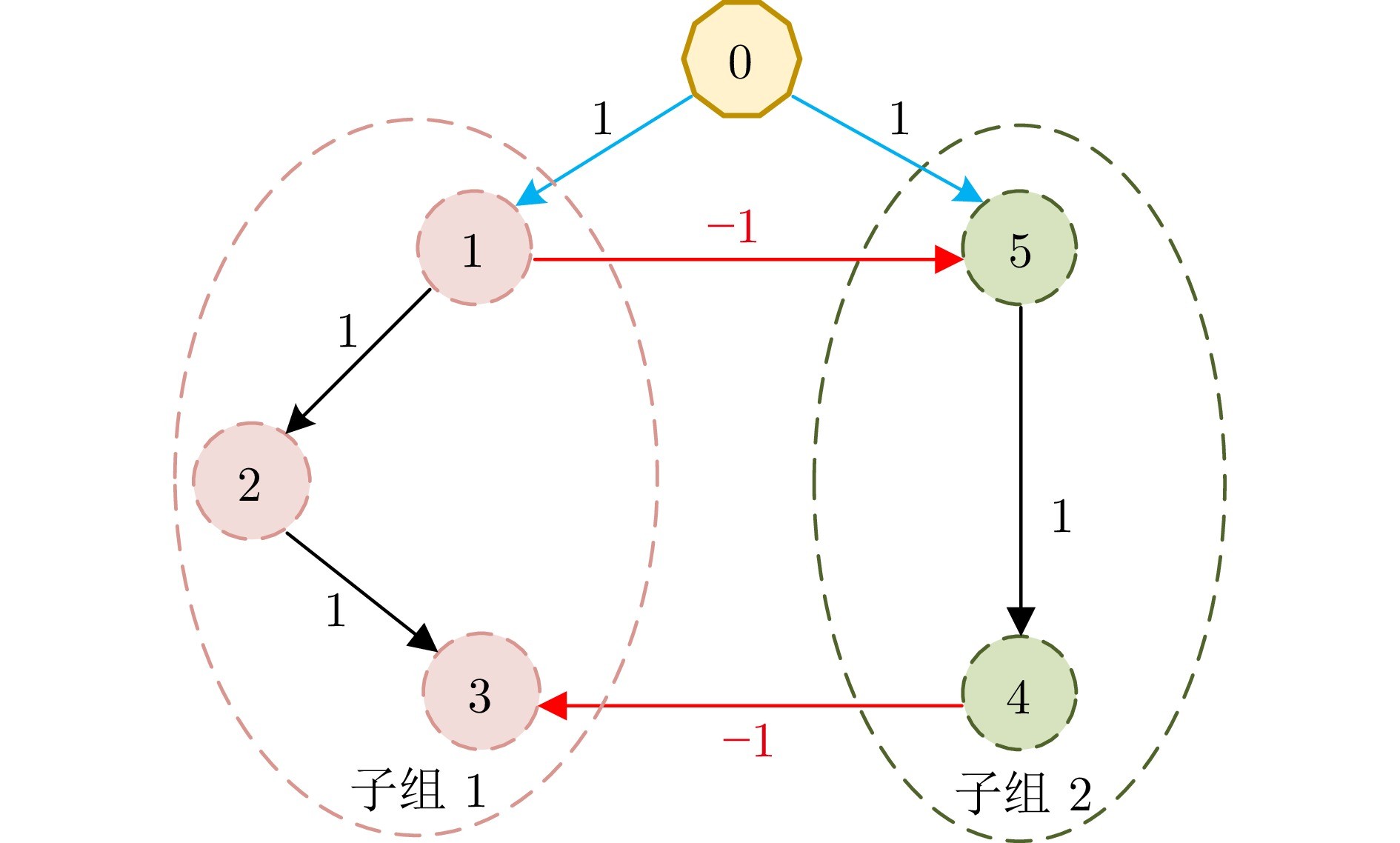
图2 系统通信拓扑图
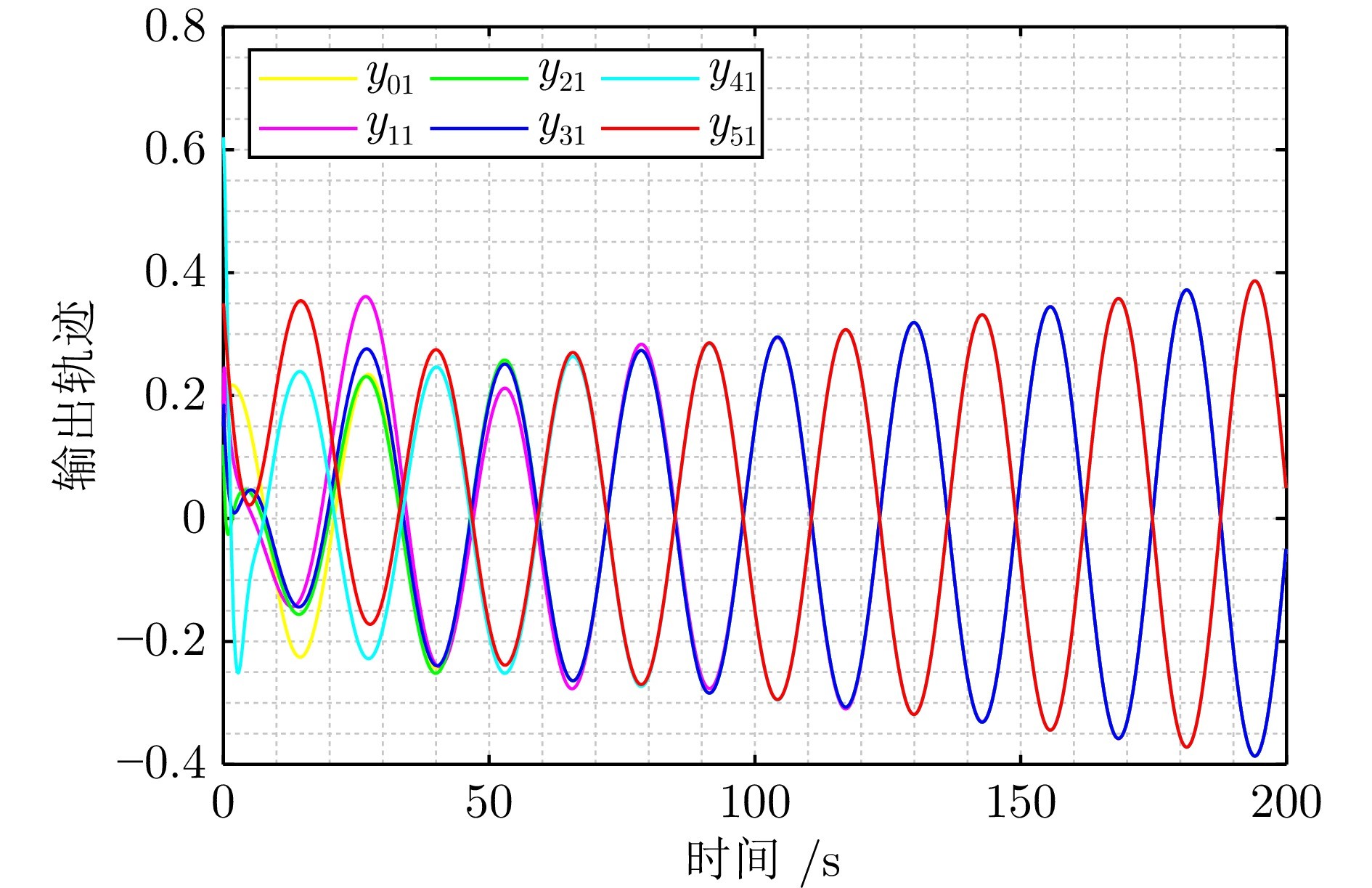
图3 分布式二分控制器(28)下的输出轨迹
本文解决了合作−竞争广义不确定异构线性多智能体系统的分布式二分输出一致性问题. 首先, 在结构平衡有向拓扑图的结构平衡下, 基于内模原理和线性矩阵不等式构造动态内模补偿器, 设计不依赖调节方程精确解的分布式二分状态反馈和输出反馈控制协议; 其次, 应用Lyapunov稳定性定理分析增广闭环广义系统的稳定性, 当系统参数在相对范围内小幅度摄动时, 系统理想的二分输出一致性问题可得到解决; 最后, 给出设计的两种二分控制协议的仿真结果. 未来工作将研究切换拓扑下离散线性多智能体系统二分容错一致性问题.
作者简介
张捷
太原科技大学电子信息工程学院副教授. 主要研究方向为多智能体系统协同输出调节和容错控制. 本文通信作者. E-mail: 2022042@tyust.edu.cn
姚瑶
太原科技大学电子信息工程学院硕士研究生. 主要研究方向为多智能体系统协同控制. E-mail: s202215210600@stu.tyust.edu.cn
王健安
太原科技大学电子信息工程学院教授. 主要研究方向为多智能体系统协同控制和复杂网络. E-mail: jiananwang@tyust.edu.cn
丁大伟
北京科技大学自动化学院教授. 主要研究方向为信息物理系统安全控制和多智能体系统协同控制. E-mail: dingdawei@ustb.edu.cn
李晓磊
燕山大学电气工程学院副教授. 主要研究方向为分布式安全控制和水下机器人控制. E-mail: xiaolei@ysu.edu.cn
李志强
中国电子科技集团公司第32研究所工程师. 主要研究方向为信息物理系统安全控制. E-mail: lizhiqiang@ecict.com.cn
https://blog.sciencenet.cn/blog-3291369-1516586.html
上一篇:基于SF-LPETB的电力信息物理系统虚假数据注入攻击定位检测
下一篇:《自动化学报》蝉联CJCR学科第1,持续入选中国最具国际影响力学术期刊
