博文
基于随机森林学习残差的重载卡车模型预测控制器设计
|
引用本文
赵康, 李小凡, 薛建儒. 基于随机森林学习残差的重载卡车模型预测控制器设计. 自动化学报, 2025, 51(11): 2427−2440 doi: 10.16383/j.aas.c250207
Zhao Kang, Li Xiao-Fan, Xue Jian-Ru. Model predictive controller design for heavy-duty trucks based on random forest residual learning. Acta Automatica Sinica, 2025, 51(11): 2427−2440 doi: 10.16383/j.aas.c250207
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250207
关键词
模型预测控制,残差学习,随机森林,轨迹跟踪,延迟
摘要
近年来, 模型预测控制(MPC)在自动驾驶领域大量应用, 但依然面临车辆动力学非线性建模、实时滚动优化等挑战. 基于数据驱动建立车辆动力学模型的MPC通过收集系统的输入输出数据, 直接学习动力学模型, 但依然需要额外处理环节解决实时滚动优化问题. 为此, 提出一种基于随机森林学习车辆动力学模型的方法. 先将车辆动力学模型分解为标称模型和残差模型, 然后利用两层随机森林学习残差模型, 上层用于切换不同线性模型, 下层拟合叶子节点的线性模型. 由于标称模型和残差模型均为线性模型, 滚动优化可直接使用二次规划求解器实时求解. 同时, 基于随机森林的残差模型使用多帧历史状态作为特征输入, 学习得到的残差模型保留动力学系统动态响应的延迟特性, 因此可有效消解延迟影响. 仿真测试和实车实验结果表明, 提出的MPC的跟踪精度和实时性均优于标称模型MPC和基于高斯过程的MPC, 并对车辆执行机构延迟具有优良的适应性.
文章导读
模型预测控制(Model predictive control, MPC)[1]在自动驾驶领域应用广泛, 其控制性能依赖于所建立模型对车辆动力学的精确描述. 悬架动力学和轮胎动力学等复杂非线性特性导致高精度动力学建模和计算效率无法兼顾, 考虑所有动力学环节构建的高维状态空间模型代入滚动优化求解无法满足控制周期[2]. 因此, 传统的物理建模方法对车辆建模过程进行大量假设, 导致模型在长时状态预测时产生较大的误差. 其次, 车辆尤其是重载卡车, 在控制器到执行机构之间的延迟导致输入与输出响应的不匹配, 影响模型预测精度和跟踪精度, 严重时将导致横向跟踪的震荡和失稳等问题.
为解决以上问题, 机器学习方法被引进车辆动力学建模中来提高模型的预测精度, 主要可分为两大类: 数据驱动建模和混合建模. 数据驱动建模[3−6]通过机器学习方法学习控制系统输入到输出之间的映射关系. 数据驱动建模学习车辆动力学可以分为系统参数辨识[3]和端到端模型学习[4−6]. 系统参数辨识[3]使用子空间系统辨识的方法来估计线性时变状态空间模型的参数矩阵, 这种数据驱动的线性时变模型预测性能高于物理模型. 但是在长时预测中会产生较大误差, 因为其缺少动力学模型的非线性部分. 端到端模型学习使用多层感知器(Multilayer perceptron, MLP)[4−5]和长短时记忆(Long short-term memory, LSTM)网络[6]等方法学习车辆动力学, 仿真结果显示LSTM在预测准确性和计算耗时上优于物理模型和MLP模型. 然而, 以上基于数据驱动的学习模型存在两个主要缺陷: 1)只使用控制对象的输入输出数据而未使用车辆物理特性, 导致其依赖于大量的训练数据并且对训练数据集外的分布缺乏泛化性, 无法保证分布外的预测精度, 对自动驾驶应用有导致碰撞等事故的隐患; 2)学习部分具有高度非线性和复杂性, 导致由其构建的模型预测问题难以实时求解. 以上缺点使其不适于应用在多步预测的模型预测控制算法之中, 它适用于控制对象物理模型难以建立的情况以及简单的控制算法和动力学仿真中.
混合建模[7−15]将控制对象的系统模型分解为标称模型和未知部分, 其中标称模型使用传统的物理模型, 如车辆运动学模型、动力学模型、误差状态模型[16]等; 使用机器学习方法学习系统模型中的未知部分. 它既利用已知控制对象的先验物理知识又利用控制对象真实响应的数据知识[7−8]. 使用先验物理知识一方面减少了建模对大量训练数据的依赖, 一方面使得系统模型对训练数据分布外的情景有更好的适应性. 使用数据知识弥补物理模型理想化假设造成的模型失配[9−10], 从而增强系统模型的预测性能. 此外, 混合建模还具有可解释性和便于修改更新等优势.
一种典型的混合建模方法是学习系统的残差模型[7−13], 残差模型表示在相同控制量输入的前提下系统真实响应输出与标称模型输出之间的差值. 车辆残差模型可以分为概率性和确定性两种. 概率性模型, 如贝叶斯线性回归(Bayesian linear regression, BLR)[7]和高斯过程(Gaussian process, GP)[8−13]是典型的学习残差模型. 基于高斯过程的非线性模型预测控制(Gaussian process based nonlinear model predictive control, GP-NMPC)[9]使用GP来学习车辆动力学的模型失配和不确定部分, 在非线性模型预测控制(Nonlinear model predictive control, NMPC)基础上通过加性模型引入概率性的残差模型提升模型预测精度, 从而提升赛车速度和保证安全行驶. 然而计算耗时是GP-NMPC实施的主要挑战, 因为GP的计算耗时依赖于使用训练数据的样本个数. 为解决这个问题, 计算近似(诱导点[17]、 筛选基函数[18]), 遗忘因子和变分稀疏GP[19−20], 数据筛选和固定字典等方法被提出并取得一定效果. 基于以上技术, GP-NMPC在许多机器人系统上得以应用, 如移动机器人和无人车的路径跟踪[11−12]、无人机的轨迹跟踪[13]和无人赛车[8−9]等. 其中GP-NMPC在完全自动驾驶(Full self-driving, FSD)赛车[8]上证明了混合模型相比于物理模型可以获得更好的跟踪精度和安全性能. 然而, 由于GP的计算依赖于使用的样本点数量, 所以在无人赛车的应用中不得不使用300个点大小的字典来保证计算实时性. GP-NMPC在乘用车[10]的轨迹跟踪实验显示, 短程训练数据时仿真实验GP耗时在20 ~ 70 ms, 实车实验GP耗时平均为80 ms, 对于更长距离更多训练数据的场景GP耗时将成倍增加. 这限制了输入特征的覆盖范围, 因此将GP-NMPC的应用限制在重复性任务上, 如固定赛道的竞速、相同物体抓取等, 这也限制了跟踪精度的上限. 权重贝叶斯线性回归(Weighted Bayesian linear regression, wBLR)[7]被用于学习执行器动力学的变化部分并在一辆陆地车上进行验证. 在泥泞环境2 m/s的速度下, wBLR比50个样本点的GP获得更小的跟踪误差. 然而此次实验是在短距离和重复性路径跟踪任务上进行, 无法证明在长距离和高速时路径跟踪的有效性.
确定性模型[14−15, 21−23], 如深度神经网络(Deep neural network, DNN)及其各种变型, 具有学习大量数据的能力, 然而却很少有确定性残差模型用来做闭环控制. 因为学习的残差模型往往是高度非线性和复杂的, 将导致以控制为中心的优化问题难以求解. 基于物理模型和LSTM串联的混合模型被用于学习巴士车[14]横向动力学和卡车[15]纵向动力学模型. 但是由于网络模型的复杂度较高导致巴士车[14]在环控制实验只在仿真中进行测试, 未能完成实车在环测试. 卡车模型[15]学习方法则将学习到的纵向混合模型当作动力学仿真器, 使用强化学习方法在仿真器中习得控制策略, 再将控制策略应用到仿真和实车的纵向控制中. 基于DNN[21]和Transformer[22]辨识模型参数和学习残差模型的方法在赛车建模中均取得较好的模型拟合效果, 但是受限于模型复杂度的增加, 只在仿真中和基于采样的MPC中进行闭环控制测试, 使用基于优化的MPC方法未能在实际赛车中得到应用. 回归树和集成方法[23]被用于建筑能耗的数据驱动建模和温度控制, 但是它没有应用先验的物理知识, 因此也极其依赖所采集的训练数据.
综上所述, 基于数据驱动建模和混合建模的车辆动力学模型由于复杂非线性和计算效率等问题较少应用于实际无人车的MPC中, 适合应用于控制在环的仿真和重复性短程任务中.
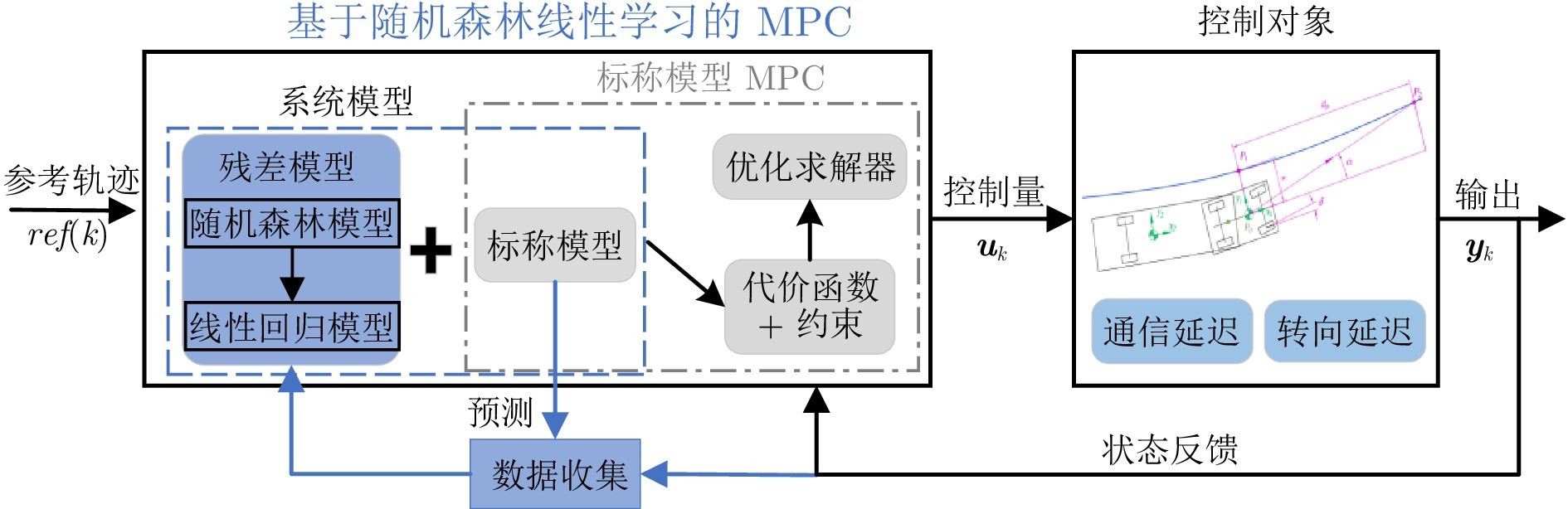
图1 基于随机森林线性学习的模型预测控制系统框图
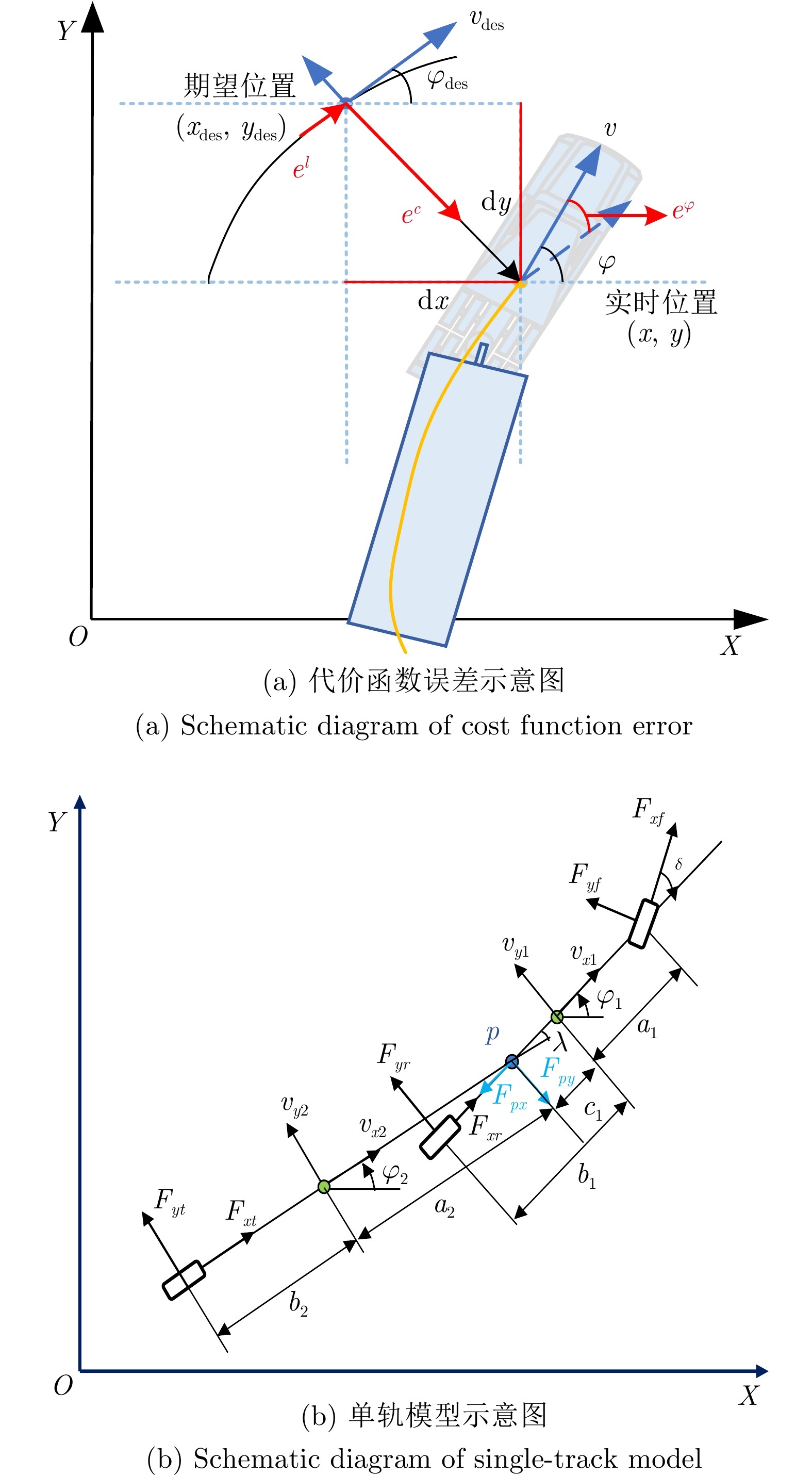
图2 半拖挂卡车单轨模型和误差示意图
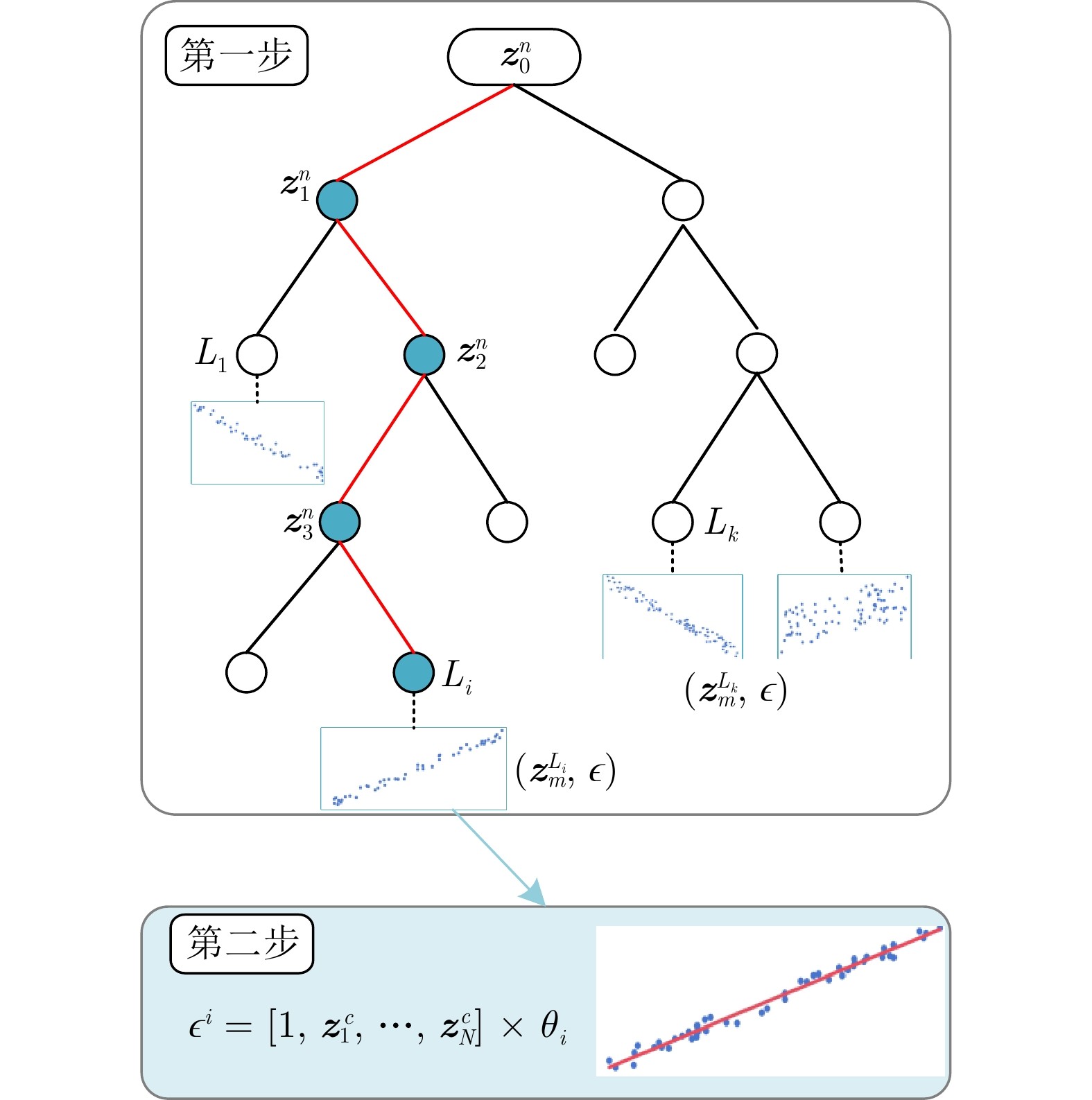
图3 回归树和叶子节点上线性回归
本文提出一种基于随机森林和线性回归分层学习的残差模型学习方法, 通过混合建模方式充分利用物理模型和数据模型各自的优点. 通过残差模型补偿标称模型的模型失配误差, 在提升模型预测精度的同时显著提升跟踪精度. 使用分层学习和线性化近似策略, 使得最终求解问题为QP问题, 极大地减少优化求解的复杂度和计算耗时. 同时, 残差模型可以解决延迟带来的控制响应不匹配的问题. 仿真测试和实车实验表明: 该方法在保证低耗时的前提下, 跟踪精度有较大提升; 在高低延迟场景, 跟踪精度均超过一阶惯性模型MPC和帕德近似MPC. 未来工作将重点研究时序模型解决车辆延迟问题.
作者简介
赵康
西安交通大学人工智能与机器人研究所博士研究生. 主要研究方向为无人车运动控制和基于学习的模型预测控制. E-mail: zhaokang@stu.xjtu.edu.cn
李小凡
西安交通大学人工智能与机器人研究所博士研究生. 主要研究方向为自动驾驶车辆运动控制和强化学习. E-mail: lixiaofan23@stu.xjtu.edu.cn
薛建儒
西安交通大学人工智能与机器人研究所教授. 主要研究方向为计算机视觉, 模式识别与机器学习, 自动驾驶和混合增强智能. 本文通信作者. E-mail: jrxue@mail.xjtu.edu.cn
https://blog.sciencenet.cn/blog-3291369-1514391.html
上一篇:面向可再生能源消纳的火电机组控制结构综合与分析
下一篇:工业垂域具身智控大模型构建新范式探索
