博文
高空风能:一片尚待开发的沃土
||
1 高空风能资源
不可再生能源的替代能源有很多,包括阳光、风、雨、潮汐等,风能是最大的替代能源来源,约占其他所有替代能源总和的一半。如今,一些先进技术已经被引入到风能的利用过程中。截止到2022年,风光发电提供全球12%的电力,成为减少二氧化碳排放的主力军。
目前国内外的风能利用以传统的风电塔架提供的低空风能发电为主,但是低空风力发电受到很多因素的制约,如低空风速小,目前主流塔架在120m的高度,而且风能不稳定,受环境影响大等不利因素;而且低空发电技术本身也存在一定的技术局限,如占地面积大,存在噪声污染,安装和维修困难等。正是由于这些制约因素,因此很多国家开始关注研究高空风力发电技术。
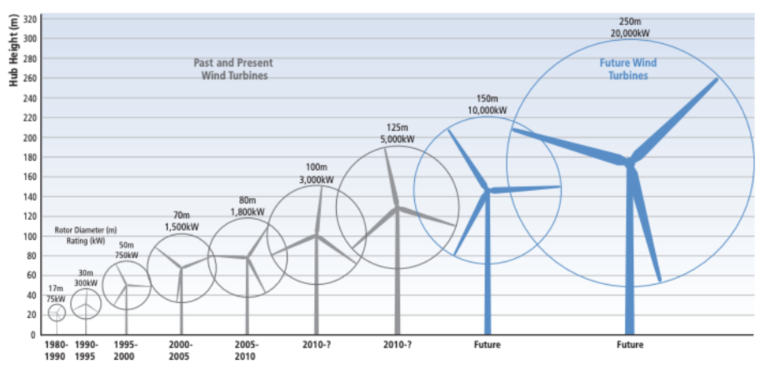
图1 传统风电的高度和尺寸增长趋势
本文所述高空风能是相对于传统的地面风力发电而言,高度一般在500-10000米之间。高空风的特点是风速大,随着与地面距离的増加和地面摩擦的减少,风速将逐渐加大。而风能与风速的立方成正比,即使高空中空气密度有所降低,但其蕴含的能量仍比地面大许多倍。即使在风能资源丰富的风力发电站区域,地面风力也远小于高空,地面附近的风力密度低于每平方米1千瓦。而在高空区域,风力密度则可以达到每平方米10千瓦以上。
根据发表在《自然-气候变化》杂志上的一项研究,高空风有可能产生比传统风力涡轮机多100倍的能量,使其成为全球向可再生能源转型的关键组成部分。
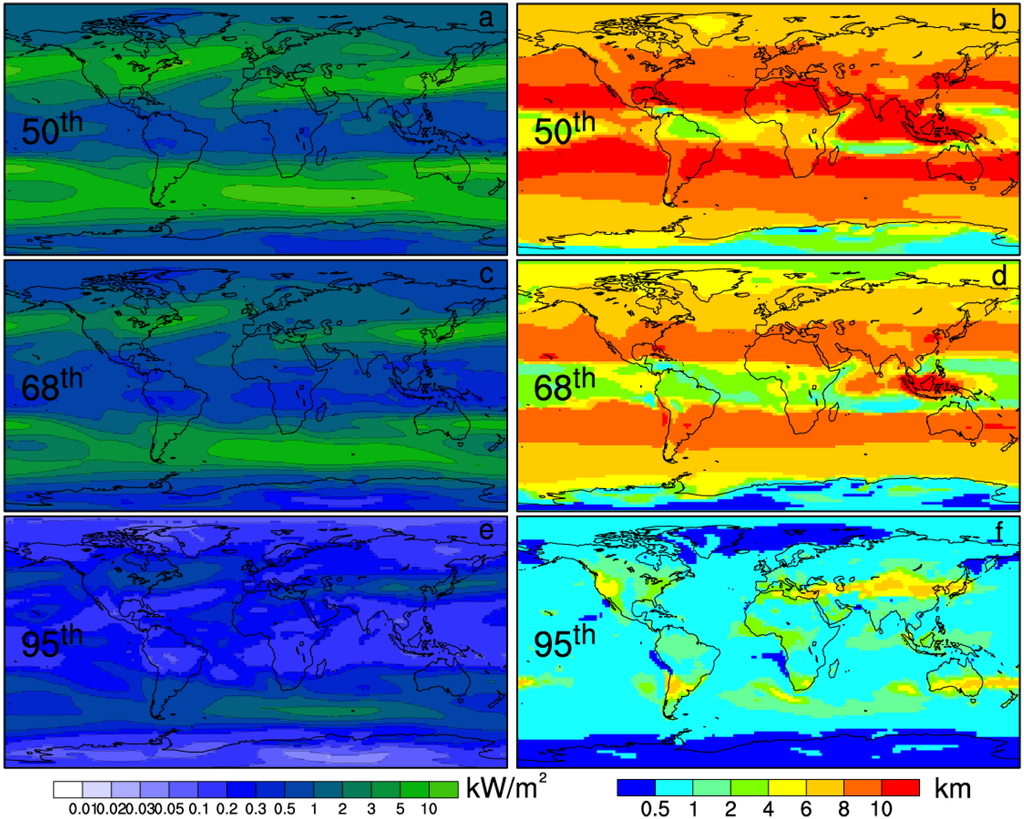
图2 最优风能密度和最优高度分析
另一个特点是高空风常年不息而且风力稳定。美国国家环境预报中心(NCEP)1979年至2006年的数据资料表明:在500米至10000米的高度范围,风的流向稳定,且高度越高、风的强度越大,稳定性就会越好;当靠近地面时,受地形等影响,风具有很强的随机性,强度也显著下降。在高空,理论发电时间可以超过95%,年发电时间可高达6500h以上。因此,采集高空风能发电可以获得高稳定性、低发电成本的风电,这是高空风电的显著特点之一,也是高空风电相比常规风电的最显著优势之一。
更为重要的是,理想的高空风力资源位于人口稠密地区。因此,高空风能发电场可以建在主干电网附近或大城市周边,利于风电就近消纳,而不像传统太阳能发电场、传统风电场多位于远离发达城市和主干电网的偏远地区。
实现高空风能发电的主要技术是高空风力发电系统( Airborne Wind Energy System, AWES),即采用系留航空器达到传统风力发电机无法达到的高度,在此高度下捕获稳定的风能并将其转化为电能。事实上,国外早在 20 世纪 70 年代爆发能源危机时,各类 AWES 的设计就不断涌现,发达国家对高空风能发电的研究从未停止,美国、荷兰、意大利等国都多次进行过高空风能发电试验。目前,全球已经超过 50 家高空风能发电公司,注册了数百项专利,近些年来,随着材料技术,浮空器技术,轻量化电力系统技术的发展,高空风能发电技术的价值逐步凸现。
2 高空风力发电系统组成
高空风力发电系统一般由飞行组件,系留组件,发电机和地面设施四部分组成。
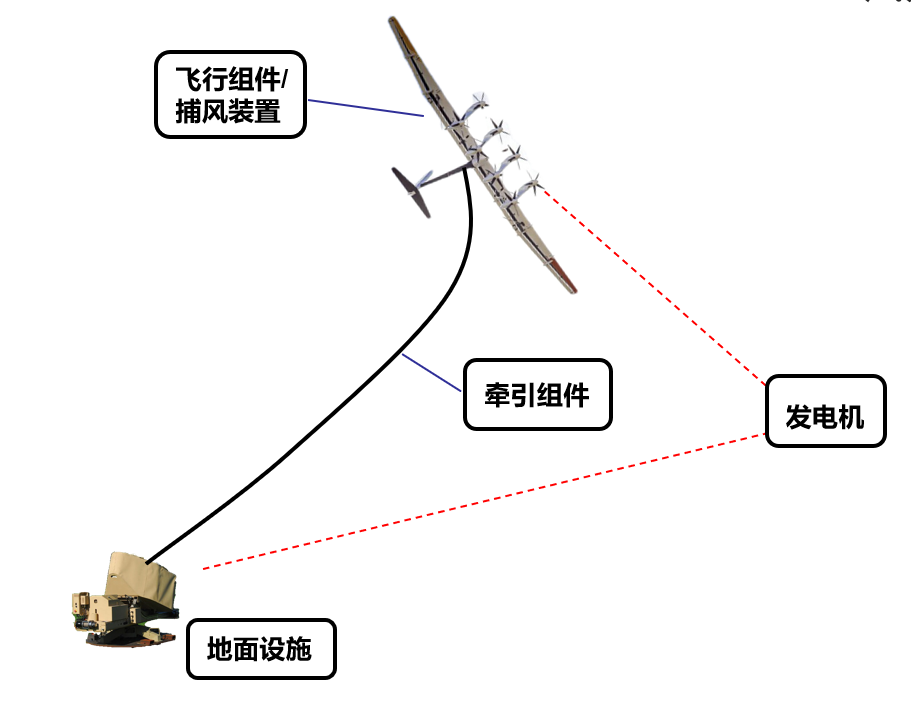
图3 典型高空风力发电系统组成
(1)飞行组件
飞行平台的主要作用是提供维持留空的升力,包括浮升力或气动升力以维持空中悬浮,部分也提供姿态调整的气动控制力,并搭载发电机等设备捕获风能。
(2)系留组件
系留组件即缆绳,连接飞行组件和地面设施,将飞行组件约束在需要的高度区域内运行,有些方案中的系留缆绳兼具电力传输和数据传输的功能。
(3)发电机
发电机主要作用是将风能转化为电能。根据发电机位置不同,可以分为空基和陆基两种,即发电机安装在飞行平台上或发电机置于地面。空基高空风电与传统风电模式类似,利用气流吹过叶片平面带动发电机发电;陆基高空风电则主要通过飞行平台以某种飞行方式带动缆绳往复牵引地面发电机转盘旋转,从而产生电能。
(4)地面设施
地面设施有两个作用,一个是控制系留缆绳的长度,使飞行组件飞行在不同的高度,另一个作用就是实现电力的变换,汇集并网。
3 高空风力发电的技术路线分类
高空风力发电系统按照风能捕获与机电能量转化方式的不同,可分为空基和陆基两种方式。即发电机安装在飞行平台上或发电机置于地面。空基高空风电与传统风电模式类似,利用气流吹过叶片平面带动发电机发电;陆基高空风电则主要通过飞行平台以某种飞行方式带动缆绳往复牵引地面发电机转盘旋转,从而产生电能。按照飞行组件的原理不同,可分为浮空飞行器型,类无人机型和风筝型。

图4 AWES的分类
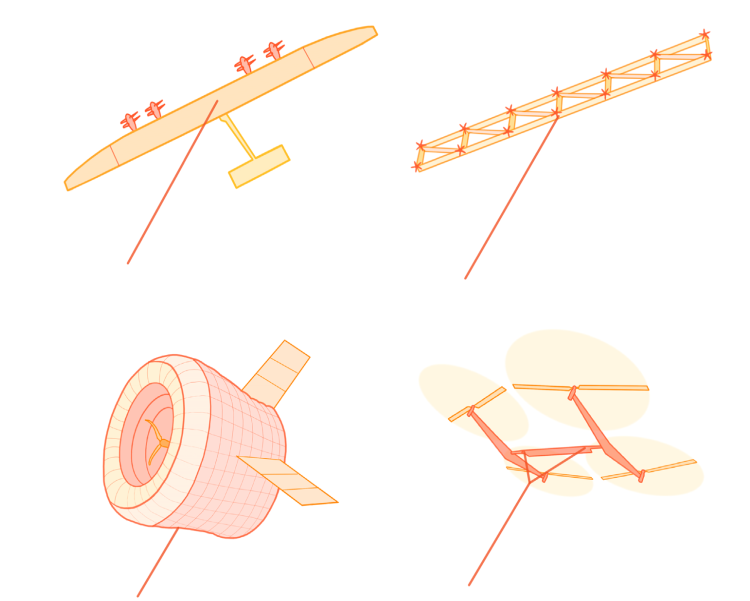
图5典型空基风力发电方案的飞行组件
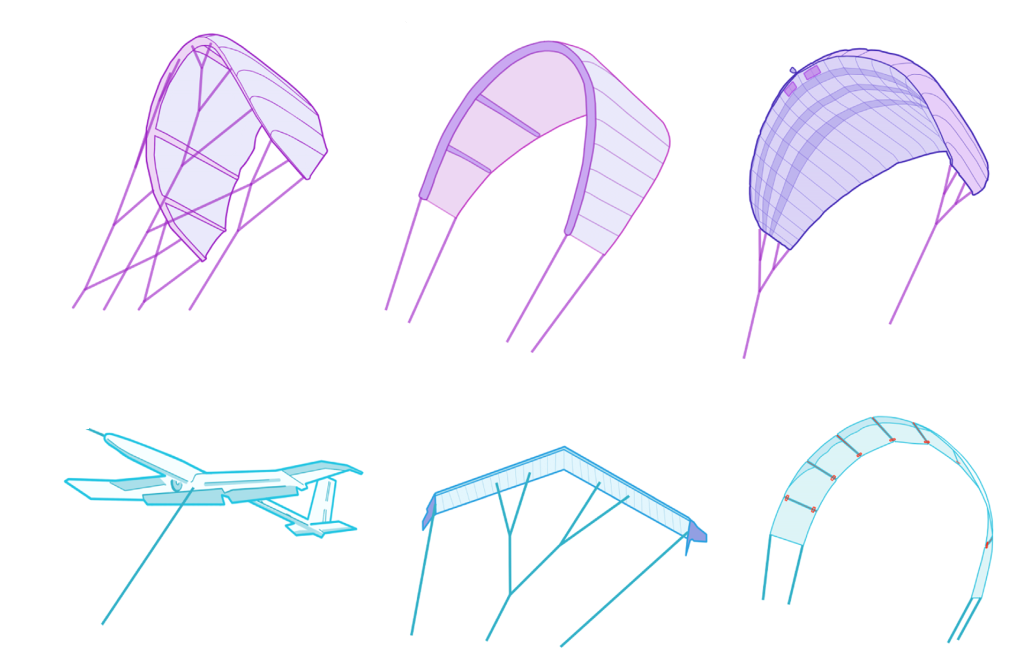
图6陆基风力发电的飞行组件
3.1 空基发电技术路线
3.1.1 浮力型方案
美国Altaeros Energies 公司研制了涵道式的浮空风力发电机,可在高度600 m以上持续发电18个月, 产生的能量是相同大小的塔式风力发电机的两倍多, 其安装简单快捷, 不需要大型地下基础设施来安装,并已经在阿拉斯加地区开展演示验证,电机功率30kw,能够为一些偏远地区,无法接入电网的地方提供持续稳定的电力。

图7 Altaeros 的涵道式浮空发电机方案
Magenn Power 公司基于马格努斯效应研制了近似椭球形浮空器的风力发电平台,工作在300 m以内的高度范围内,适用风速为2.5~30 m/s。平台转速较低,稳定性好,具有较大的迎风面积。

图8 Magenn Power原理验证样机
德国的Aeerstatica公司提出了前后共轴双桨浮空器高空风力发电方案,浮空器采用传统的飞艇流线型外型,目标飞行高度为300m。

图9 Aeerstatica概念图
对比三种不同的浮空器风力发电方案,涵道式方案是最接近传统风力发电的方式,只是利用浮力把发电机升高来捕获更强的风能,而且其气动外形设计具有更好的抗风能力,可以升到更高的高度,具有一定的优势。
3.1.2 无人机型方案
美国的Makani公司方案工作原理是用系缆拽着固定翼无人机飞行在250~600米高空,通过控制飞行路线,捕获高空的风能产生电力,机翼上的涡轮机可以迎风发电,电力沿着系绳电缆输送到地面站,发电机功率达到了600kw。另外Joby Energy,Sky Windpower,Windlift等公司也采用了与Makani近似的技术路线。
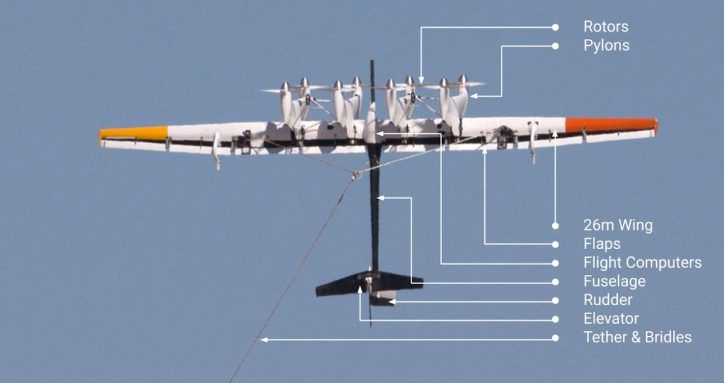
图10 Makani 飞行组件构成
3.2 陆基发电技术路线
3.2.1 风筝型方案
意大利KiteGen公司是风筝发电技术的先驱,其方案的特点为,绳索缠绕在绞车上,并由滑轮系统通过20米长的柔性杆驱动到拱形风筝,柔性杆通过一个两轴关节结构连接到控制台的顶部,通过控制绳索分别实现做功和回收功能转换。2015年4月KiteGen公司建设了世界上首个规模化的风筝发电站投入使用,装机容量3MW。
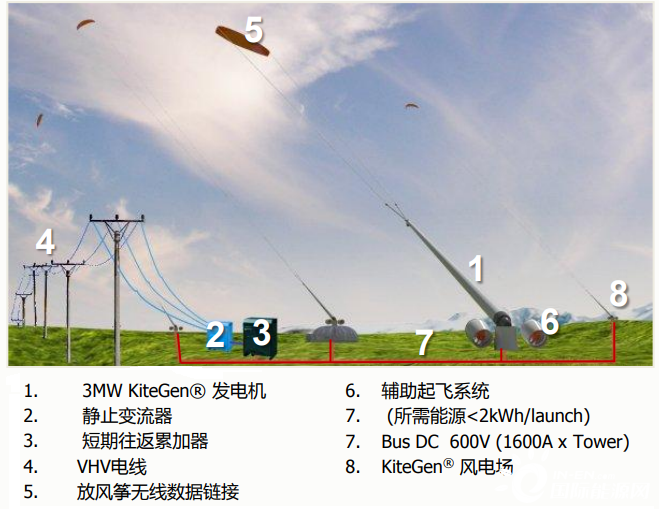
图11 KiteGen 风筝式发电系统组成
采用风筝式陆基发电方案的公司还有很多,例如Kite Power System,EnerKite,Kitenergy,Kite Power等,国内广东高空风能技术有限公司研发的伞梯组合式风力发电,可归类于风筝式陆基发电方案,其飞行组件为降落伞。该系统设计目标工作在500~10000 m高空,系统采用模块组合结构,通过调整系统运行高度和改变模块数量实现发电功率可调节。

图12 伞梯组合方案
3.2.2 类无人机型方案
还有一些公司飞行组件与空基发电的makani类似,都是固定翼无人机,但是发电机是放置在地面的,归类于陆基高空风力发电路线,例如,Ampyx Power ,E-kite,Kite mill等。

图13 Ampyx Power 的飞行组件
3.3 优缺点对比
空基和陆基两条技术路线各有优劣,下面从发电稳定性,可用风能密度,飞行组件轻量化,线缆磨损率,飞行可控性,系统集成难度,环境友好性7个维度进行对比。
3.3.1 发电稳定性
采用陆基发电的方式,发电机放置在地面,通过风力拉拽飞行组件,从而放出系缆带动地面发电机转动做功发电,但做功的过程无法持续进行,因为系缆释放到一定程度必须收回再重复下一个做功循环,所以系缆收回的过程必定无法做功,无论风能资源如何,此种方式的发电机都是间歇工作的,发电稳定性存在天然缺陷。
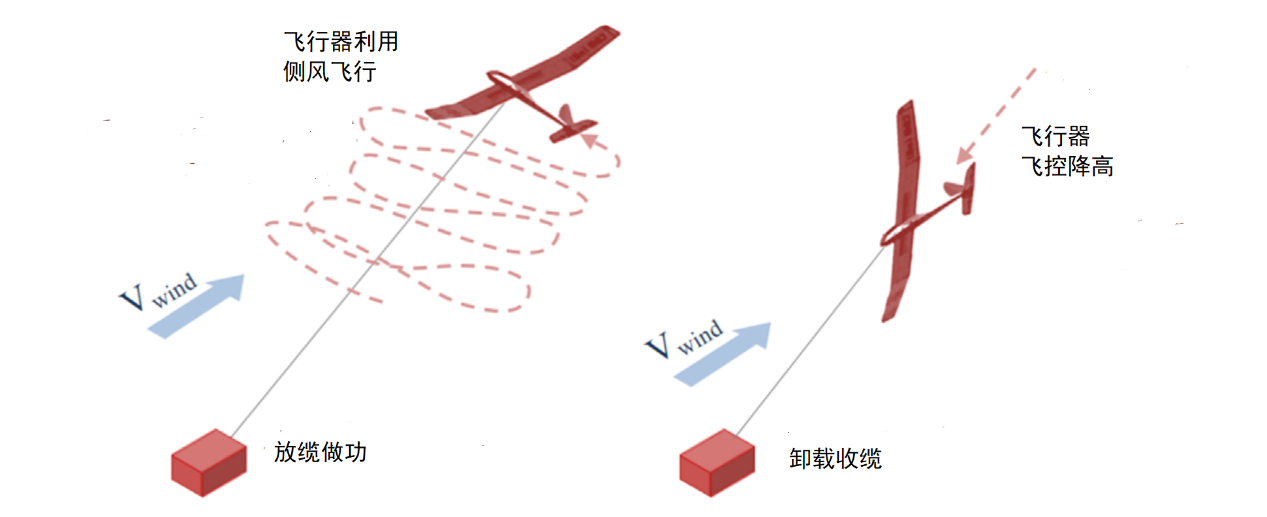
图14 陆基发电方案不同阶段示意图
而采用空基发电的方式,气流吹过叶片平面带动发电机发电,只要风能资源持续,发电就可以源源不断,与传统的风电模式类似,高空的风力资源只要稳定,该系统的发电能力就能保持稳定。
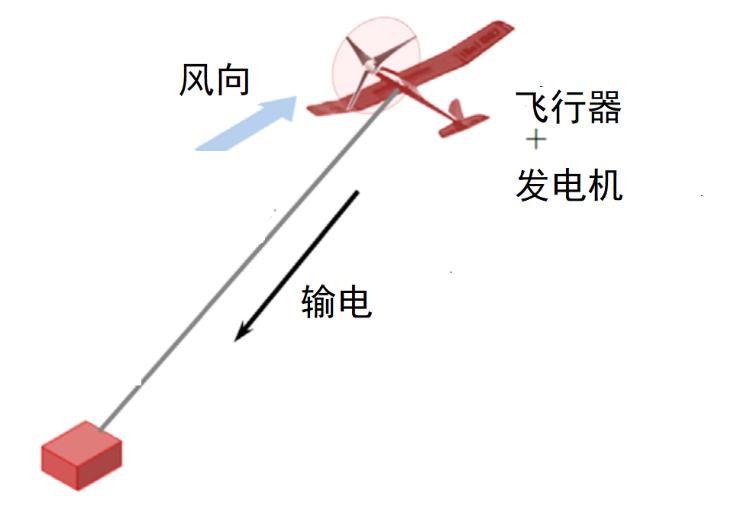
图15 空基方案发电示意图
3.3.2 飞行组件轻量化
陆基发电方式的发电机在地面,空中的飞行组件一般为风筝型,或类似于无人机构型,空中结构较轻,而且不需要从空中输电至地面,系缆中不需要输电导线,所以空中部分的重量较轻,容易实现。
空基风力发电方式,发电机,风机叶片都在空中,并且需要系缆输电,空中组件的总体重量要高于陆基方式,所以飞行组件的轻量化设计很关键。
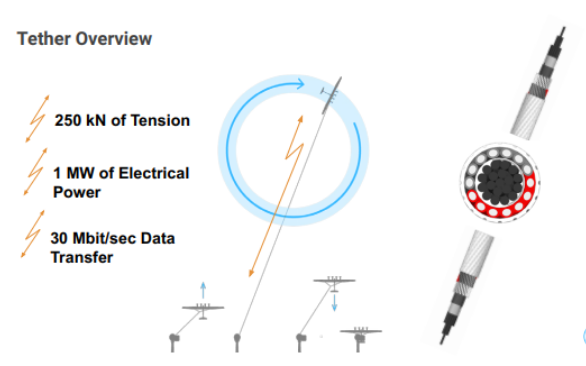
图16 空基发电路线的典型系缆组成
3.3.3 线缆磨损率
陆基发电需要持续不断地释放系缆发电做功,回收系缆卸载,对于需要长时间运行的发电系统而言,系缆的耐磨性要求很高,这可能会是制约此类技术复制推广的关键因素之一。
空基发电方式,原则上只需要在首次部署的时候释放系缆达到驻空高度,其它时间只需要保持在此高度发电即可,系缆基本不需要调整,仅在保养维护周期到达后需要回收系缆进行设备检修,所以系缆不存在持续不断的收放工况,线缆磨损率要求较低,技术可行性高。
3.3.4 飞行可控性
在陆基发电方案中,飞行组件完成做功过程后,需要通过控制手段将飞行组件卸载,回收系缆以便进行下一次循环的做功,此过程要保证回收卸载耗费的能量小于释放做功的能量,才能实现有效的发电,而且在工作寿命期,这种循环是需要大量重复的,所以对飞行组件的控制精准程度和可靠性提出了较高的要求。
在空基发电方案中,只要风能资源能够支撑飞行器和系缆的重量,飞行组件就能够保持在固定高度稳定工作,特别是采用浮空器作为升力组件的方案,几乎不需要进行飞行控制,整体的控制技术难度要求不高。
3.3.5 可用风能密度(飞行高度)
在陆基发电方案中,大多数采用的是类似于风筝的飞行组件方案,因为其存在做功和卸载的不同工作模式,决定了其迎风面积无法做的太大,这样带来的影响就是采用陆基发电方案的飞行高度都无法达到太高,换言之可用的风能密度较低。目前运行的风筝陆基发电项目中,飞行高度都在3000米以下。2016年时,我国广东汕头放飞了一个7250米长的风筝,总共串联了大小共145只小风筝,打破了吉尼斯世界纪录,其离地高度大约在4000-5500米之间。
在空基发电方案中,只要飞行器提供的升力足够大,飞行组件就能够保持在足够高的高度。特别是浮空式方案,2022年的“极目一号”III型系留气球已经可以到达9050米高度并稳定工作,从侧面印证了此类方案在升空高度(可用风能密度)方面具有一定的优势。
3.3.6 系统集成难度
陆基方案和空基方案都需要飞行组件,系缆和发电机以及地面设施,但因为空基方案的发电机在空中,所以需要考虑电能从空中的变换,通过系缆的传输等环节,如果是浮空式方案,还需要考虑浮升气体的泄漏与补偿问题,所以系统集成难度高于陆基方案。
3.3.7 环境友好性
风力发电对生态环境的影响也是公众比较关心的问题。最直接的就是鸟类的安全问题。大多数鸟类飞行的高度区间在海拔3000m以下,风电的开发利用对鸟类的影响尤为突出。被称为世界上最大的风力发电站之一的加利福尼亚阿特蒙关口风能电场,每年都会有5000只以上鸟类丧命于此,因此导致每到候鸟迁徙季节政府就不得不关停所有风机 。

图17 飞行高度最高的几种鸟类
相比较而言,空基方案因为工作高度更高,对鸟类的影响也更小一些。如果能够达到风能密度最理想的高度10000米高空,则几乎只有灰鹤和黑白兀鹫可以到达,幸运的是,灰鹤平常的飞行高度并不会太高,只有在躲避猛禽抓捕的时候会高飞,而黑白兀鹫只分布在非洲中南部,数量极其稀少。
3.3.8 小结
从上述七个方面对比,两种方案的优缺点如下,其中陆基方案在飞行组件轻量化,系统集成难度两方面占优,空基方案在发电稳定性,线缆磨损率,飞行可控性,可用风能密度(飞行高度),环境友好性5个方面占优。总体上看,空基方案有一定的优势,但需要解决飞行组件轻量化等关键技术问题。
表1两种路线优缺点对比
项目 | 陆基方案 | 空基方案 |
发电稳定性 | ★★ | ★★★★ |
飞行组件轻量化 | ★★★★ | ★★ |
线缆磨损率 | ★ | ★★★★★ |
飞行可控性 | ★★ | ★★★★★ |
可用风能密度 (飞行高度) | ★★ | ★★★★★ |
系统集成难度 | ★★★★ | ★★ |
环境友好性 | ★★ | ★★★★★ |
4 展望
开发高空风能是未来能源技术发展的需要,AWES 发电成本有望控制在低于 0.3 元/(kW·h)以下,电力输出相对稳定,风电场的建设成本较低,占地面积较小,不易受地域差异的限制。总体而言, AWES 在建设成本、发电效率、发电成本等方面有着较多优势。
目前全球AWES市场主要包括北美、欧洲、亚太、中东和非洲以及拉丁美洲,这些地区可进一步分为美国、英国、德国、法国、日本、中国、印度、海湾合作委员会、北非、南非和巴西等国家/地区,私营公司是目前AWES技术研究的主力,同时一些科研机构也在探索高空风力发电的潜力。例如,欧盟资助的项目REACH(可再生能源空中转换和收集)是几个大学和研究中心的合作,目标是开发利用高空风的新技术和战略。同样,美国能源部的国家可再生能源实验室(NREL)正在对高海拔风力发电的可行性和潜在效益进行研究。
上述几个国家的政府均组织参与了制定新的规章制度:通过鼓励利用AWES方法,生产清洁的、可持续的能源来减少污染。我国虽然在高空风能发电技术方面起步较晚,但近期将高空风力发电技术写入了国家重点研发计划指南,在国家政策支持方面具有里程碑意义。
遥想在不久的将来,在户外酷热难当的炎炎夏日,我们生活在温度舒适的房间里面,空调使用的电能,可能转换自平流层的风能,这就是可再生能源领域的一场革命。
参考文献:
1. 邵垒,毛虹霖,邢胜,等.高空风力发电发展现状及关键技术研究综述[J].新能源进展, 2020.DOI:10.3969/j.issn.2095-560X.2020.06.005.
2. Cherubini A , Papini A , Vertechy R ,et al.Airborne Wind Energy Systems: A review of the technologies[J].Renewable & Sustainable Energy Reviews, 2015, 51:1461-1476.DOI:10.1016/j.rser.2015.07.053.
3. 马鸣,李军伟,李进.灰鹤:飞越天山[J].森林与人类, 2019(5):12.DOI:CNKI:SUN:SLRL.0.2019-05-003.
4. Archer, Cristina L ,Caldeira,et al.Energies, Vol. 2, Pages 307-319: Global Assessment of High-Altitude Wind Power[J]. 2009.
5. Tummala A S .A Review and Aspects of High Altitude Wind Power Generation[C]//International Conference on Trends and Advanced Research in Green Energy Technologies, ICTARGET-2017.2017.
6. 刘耀广,王耀坤,万志强,等.系留悬浮式风力发电技术的研究进展与展望[J].航空工程进展, 2021, 12(4):8.DOI:10.16615/j.cnki.1674-8190.2021.04.04.
7. 王若钦,严德,李柳青,等.切风模式风力发电飞行器的进展与挑战[J].航空工程进展, 2018, 9(2):8.DOI:10.16615/j.cnki.1674-8190.2018.02.001.
8. Chaudhari R .Electric Energy Generation by Magenn Air RotorSystem (MARS)[J]. 2015.
9. Nambiar R R, Dixit M, Pant R S. Methodology for Conceptual sizing of a Turbine Aerostat for Electrical power generation[C]//AIAA AVIATION 2023 Forum. 2023: 3792.
10. Vermillion C, Cobb M, Fagiano L, et al. Electricity in the air: Insights from two decades of advanced control research and experimental flight testing of airborne wind energy systems[J]. Annual Reviews in Control, 2021, 52: 330-357.
11. Getting airborne – the need to realise the benefits of airborne wind energy for net zero White Paper for Airborne Wind Europe
https://blog.sciencenet.cn/blog-3057882-1401650.html
上一篇:科幻大片既视感:马格努斯效应浮空器
下一篇:沙漠历险记 -记一次高空科学气球吊舱的回收经历
