博文
基于干扰估计的非对称运动下飞机刹车系统模型预测控制
|
引用本文
李繁飙, 杨皓月, 王鸿鑫, 阳春华, 廖力清. 基于干扰估计的非对称运动下飞机刹车系统模型预测控制. 自动化学报, 2022, 48(7): 1690−1703 doi: 10.16383/j.aas.c210852
Li Fan-Biao, Yang Hao-Yue, Wang Hong-Xin, Yang Chun-Hua, Liao Li-Qing. Model predictive control of aircraft braking system under asymmetric motion based on disturbance estimation. Acta Automatica Sinica, 2022, 48(7): 1690−1703 doi: 10.16383/j.aas.c210852
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c210852
关键词
飞机防滑刹车及纠偏,干扰观测器,跑道辨识,非线性模型预测控制
摘要
针对飞机在非对称运动下的双侧机轮协调控制问题, 提出一种基于滑模干扰估计的模型预测控制方法. 首先, 通过对飞机制动过程横纵方向力矩机理分析并分别考虑左右机轮对刹车性能的影响, 建立全面刻画系统动态的地面滑跑动力学模型. 在此基础上, 设计滑模观测器对侧风干扰进行实时估计, 利用补偿机制实现对侧风扰动的有效抑制. 此外, 提出基于前轮荷载状态门限特征和结合系数阈值范围特征的分析方法, 解决切换跑道环境辨识问题. 设计非线性模型预测算法, 实现飞机纵向防滑刹车和横向跑道纠偏的协调控制. 最后, 在侧风干扰、跑道切换以及不对称着陆等情况下进行仿真实验, 验证了所提出的控制策略能够有效提升刹车系统的防滑效率及纠偏性能.
文章导读
机轮刹车系统是保证飞机刹车安全和地面滑跑性能的重要机载装置, 受到高速起降过程中的大动能、横纵力矩耦合严重、侧风干扰和复杂跑道环境等影响, 导致对飞机防滑刹车和纠偏控制设计非常困难. 另外, 作为滑跑阶段的“掌舵人”, 机轮刹车系统是关系到飞机核心安全性的A类装置, 即出现故障会造成灾难性后果[1]. 因此, 具有高度适应性和可靠性的刹车系统设计研究一直是国内外学者关注的重要课题, 如全电刹车系统[2-4]、电静液刹车系统[5-6]、智能刹车系统[7-8]等.
机轮防滑与跑道纠偏控制分别是体现在刹车控制设计过程中横纵两方面的研究重点, 直接影响刹车距离和偏航距离两个重要性能指标. 例如, Jiao等和D'Avico等分别在文献[9]和文献[10]中, 针对纵向力矩影响下的刹车控制, 分别考虑了纵向滑跑模型建模和防滑刹车控制问题, 但都忽略横向作用力的影响; Dai等和Chen等分别在文献[11]和文献[12]中, 针对横向力矩影响下的纠偏控制, 分别考虑了差动纠偏和前轮转弯控制问题, 但都对纵向滑跑进行特殊化处理. 需要指出的是, 以上工作仅单独考虑了防滑刹车或纠偏的机理建模与分析, 忽略了机轮刹车过程中横纵力矩的耦合影响. 对此, 本文将深入剖析刹车过程中多方向力矩机理, 克服传统的单机轮模型仅刻画了系统纵向动态的弊端, 针对左右机轮分别独立建模, 深入分析非对称运动条件下对刹车效率的影响.
另一方面, 强侧风干扰可能造成机轮附着力不足, 导致侧滑甚至偏离跑道[13]. 因此, 强侧风对飞机滑跑性能的影响不容忽视[14], 目前针对该问题的研究仍然缺少较好的处理手段. 针对强侧风干扰下的非对称运动问题, 本文考虑利用滑模干扰观测器来对侧风力的影响进行有效估计, 并引入干扰补偿对侧风干扰进行有效的抑制. 此外, 飞机刹车过程中需要保持最大结合系数以达到较高的刹车效率, 因此必须对飞机跑道状态进行精准辨识. 当前飞机跑道辨识技术分为两种, 一种是高精度传感器对不同跑道情况进行最大结合系数测量识别[15], 该方法准确率较高但相关传感器较为昂贵, 此外需要较多的实际数据模型经验, 难以保证对复杂跑道辨识的自适应性. 另一种是通过机体和机轮运动中状态变化数据来估算结合系数的大小[16], 常用刹车过程中的打滑信息来估计轮胎与跑道之间结合性能的优良, 但对识别算法复杂性和计算效率依赖要求较高. 本文拟利用前轮荷载状态门限特征和结合系数阈值范围特征来解决跑道辨识问题.
对于机轮刹车控制系统, 刹车压力和前轮转角在起降过程中不同阶段有不同约束, 例如在高速滑跑阶段, 考虑到安全问题, 禁止前轮大转向和主轮差动刹车[17]. 模型预测控制能够为处理具有输入和状态约束的系统提供一种强有力的解决方案, 目前被广泛应用于航空航天[18-20]、智能制造[21-23]、过程控制[24-26]等多个领域. 另外, 模型预测控制方法能在线求解开环优化问题, 并通过预测估计、滚动优化以及反馈矫正等环节对外部干扰和模型不确定性具有较好的适应性和鲁棒性. 因此, 本文拟通过设计非线性模型预测算法, 解决非对称运动下飞机纵向防滑刹车和横向跑道纠偏的协调控制问题.
本文针对飞机在高速滑跑阶段的防滑刹车及纠偏控制问题, 在双机轮非对称运动下建立了飞机滑跑动力学模型. 兼顾考虑侧风干扰及跑道环境的影响, 通过引入滑模干扰观测器以及飞机跑道辨识技术进行干扰补偿和跑道辨识. 基于非线性模型预测控制对多状态约束下的飞机刹车系统进行实时控制, 以达到飞机平稳安全降落的目标. 本文主要贡献点包括:
1) 针对现有飞机防滑刹车模型忽略了横纵力矩耦合, 不能全面刻画系统纵向动态的问题, 本文剖析了滑跑系统动力学中左右机轮轮胎摩擦力、机体侧风力以及方向舵力矩之间的耦合机理, 在符合实际的基础上有效描述飞机滑跑阶段系统的横纵动态.
2) 针对飞机易受侧风干扰, 导致飞机滑跑偏航的问题, 设计一种基于有限时间稳定的滑模干扰观测器, 对侧风力干扰进行有效估计, 引入补偿机制实现对侧风扰动的有效抑制, 以保证纠偏控制性能.
3) 针对飞机不能及时辨别跑道切换, 从而导致防滑刹车效率低下的问题, 提出一种基于前轮荷载和结合系数设计门限和阈值范围分析方法, 在不同跑道切换情况下及时给控制器提供滑移率信息, 从而提升防滑刹车效率.
4) 结合干扰观测器和跑道辨识方法设计非线性模型预测控制器, 在保证飞机防滑刹车效率的同时, 兼顾完成滑跑纠偏及姿态矫正任务.

图 2 飞机滑跑轮胎侧偏角及受力分析图
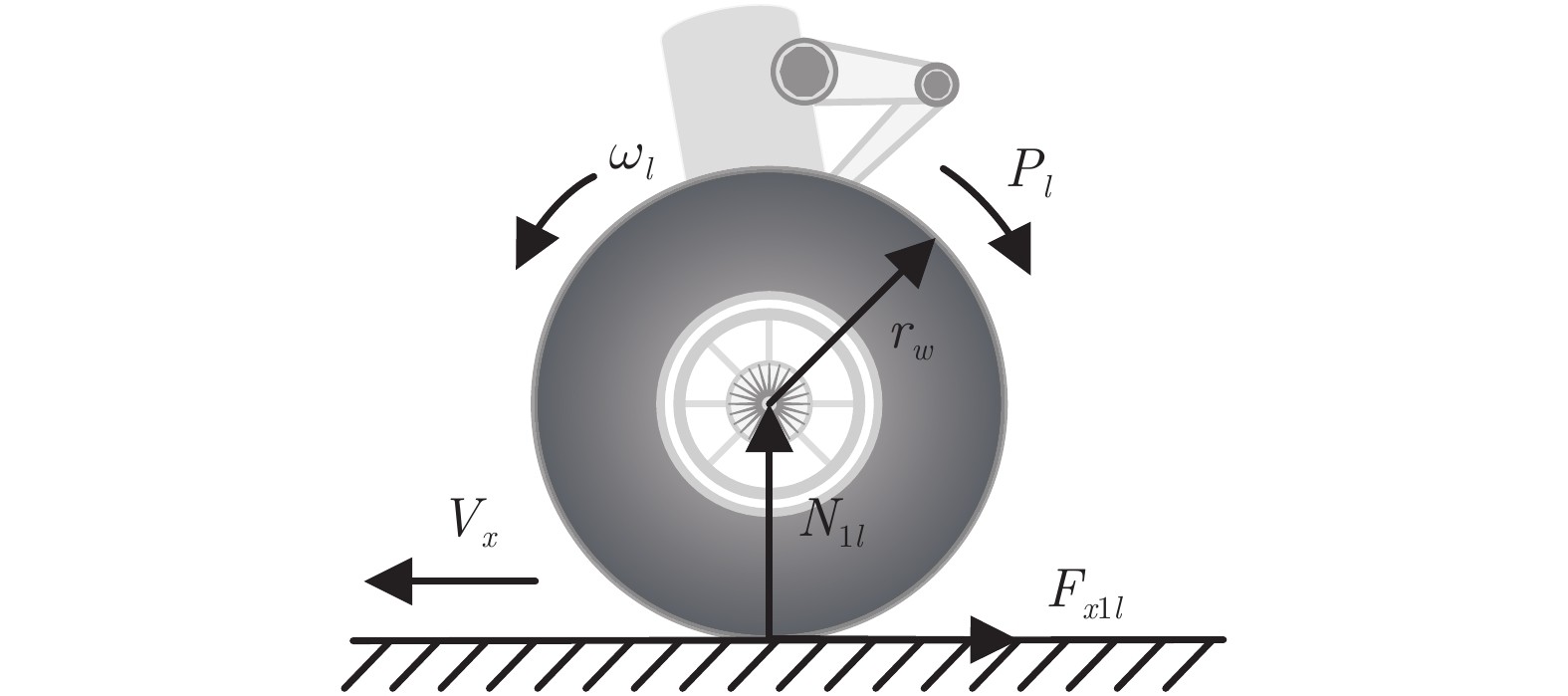
图 3 飞机滑跑中左机轮受力分析图

图 5 跑道切换时结合系数变化示意图
本文研究了飞机在刹车过程中的防滑刹车与纠偏协调控制问题. 通过综合考虑飞机的刹车滑移率、纠偏距离以及偏航姿态等信息, 并且将强侧风干扰引入到系统建模中, 建立了双侧机轮非对称运动下的飞机地面滑跑动力学模型. 在此基础上, 设计了基于有限时间的滑模干扰观测器对飞机侧风干扰进行有效估计, 并且设计了跑道辨识技术对复杂跑道切换进行精准识别. 通过非线性模型预测控制方法, 将飞机左右机轮滑移率、偏航距离以及偏航姿态作为优化目标, 完成了防滑刹车及纠偏协调控制. 通过数值模拟仿真, 验证了本文提出的非对称运动下刹车系统模型的正确性和所设计的非线性模型预测控制方法的有效性.
作者简介
李繁飙
中南大学自动化学院教授. 2015年获得哈尔滨工业大学博士学位. 主要研究方向为复杂工业过程智能控制与优化, 非连续控制理论及其在飞机起落架系统中的应用. 本文通信作者. E-mail: fanbiaoli@csu.edu.cn
杨皓月
中南大学自动化学院硕士研究生. 主要研究方向为飞机刹车系统建模与控制. E-mail: haoyueyang@csu.edu.cn
王鸿鑫
中南大学自动化学院博士研究生. 2015年获得西北工业大学航空工程硕士学位. 主要研究方向为基于模型的系统工程和基于模型的设计在飞机研制领域的应用, 民用飞机数字孪生建模和机载系统集成仿真. E-mail: wanghongxin@csu.edu.cn
阳春华
中南大学自动化学院教授. 2002年获得中南大学博士学位. 主要研究方向为复杂工业过程建模与优化, 故障诊断和智能系统. E-mail: ychh@csu.edu.cn
廖力清
中南大学自动化学院教授. 2010年获得中南大学博士学位. 主要研究方向为电力电子与电力传动, 电力系统自动化和飞机起飞着陆系统智能控制. E-mail: zdh-dqkz@csu.edu.cn
https://blog.sciencenet.cn/blog-3291369-1346136.html
上一篇:基于变分信息瓶颈的半监督神经机器翻译
下一篇:考虑输出约束的冗余驱动绳索并联机器人预设性能控制