博文
[转载]核磁共振陀螺的PID控制算法
||
核磁共振陀螺的PID控制算法
雷兴1,2,黄晨煜1,2,刘华3,4,5
(1. 中国航空工业集团公司西安飞行自动控制研究所,西安 710076; 2. 量子传感与定位导航授时技术航空科技重点实验室,西安 710076;3. 航空电子综合与体系集成全国重点实验室,上海,200240;4.海底科学与划界全国重点实验室,上海,200240;5.上海交通大学 自动化与感知学院,上海,200240)
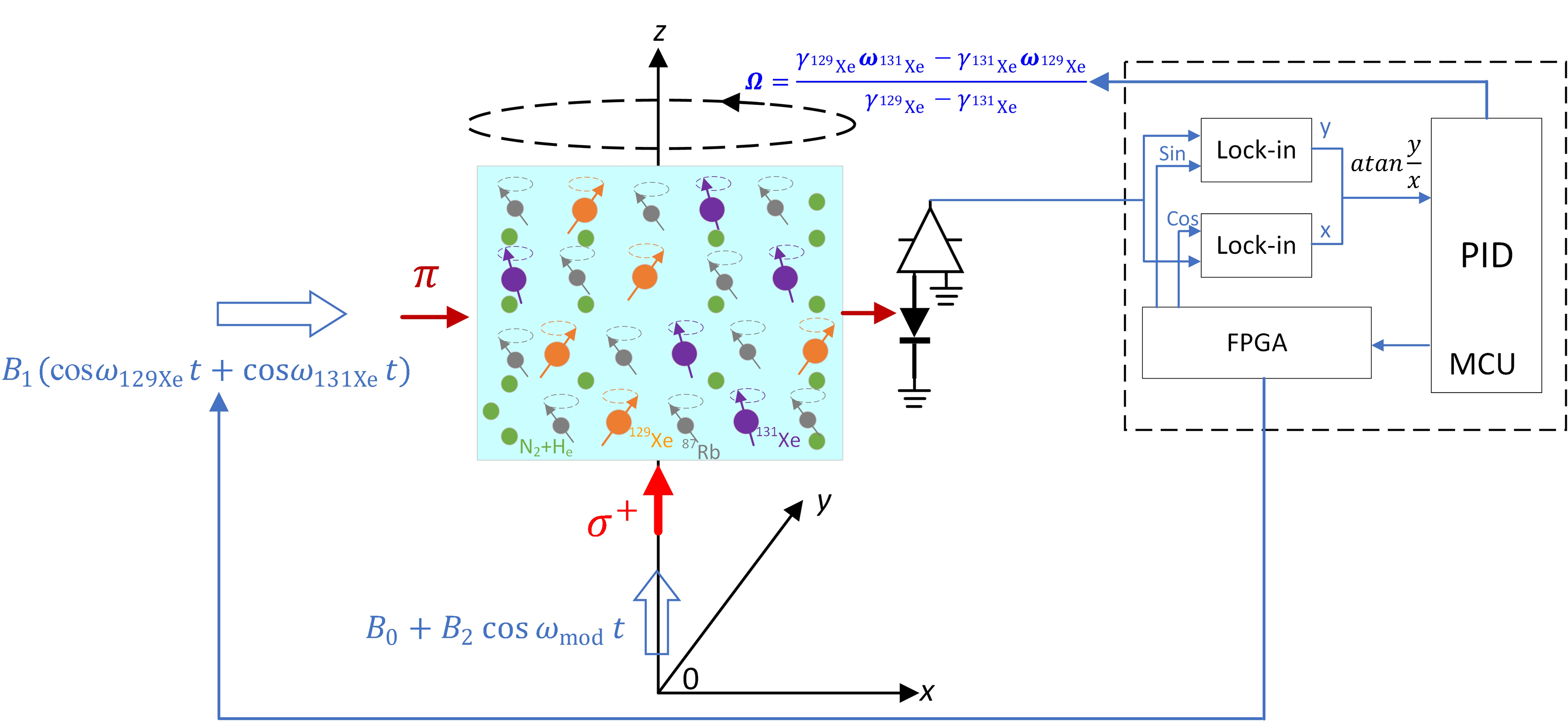
摘要:本文提出了一种用于核磁共振陀螺仪的新型比例-积分-微分(PID)控制算法。在实际应用中,核磁共振陀螺仪转速的随机变化会导致129Xe和131Xe原子核拉莫尔进动频率随机变化。为了保持核磁共振状态,本文提出的PID算法形成了一个反馈控制环路,实时跟踪这些变化的频率。该系统采用锁定放大器来检测这两种惰性气体同位素的极微弱进动信号,根据I/Q解调器的输出实时计算惰性气体原子核的拉莫进动相位,PID控制器根据这些相位与零的偏差来调整所施加交变磁场的频率,从而使129Xe和131Xe的自旋进动频率锁定到各自的共振频率。随后根据由此产生的拉莫尔频率偏移推导出陀螺仪的角速度。这种方法可以在不考虑主场干扰的情况下,对129Xe和131Xe的自旋进动频率进行伺服控制。实验结果表明,所提出的PID算法能够成功跟踪惰性气体进动频率,且精度高达0.005 Hz。陀螺转台实验结果表明,核磁共振陀螺样机能够有效地检测陀螺转台输入角速度从0°/s增加到12°/s,再反向到-12°/s,最后返回到0°/s的变化。
关键词:核磁共振陀螺,比例-积分-微分控制算法,锁相放大器,法拉第旋光
扫二维码浏览全文

Cite this article
Lei, X., Huang, C. & Liu, H. PID Control Algorithm for a Nuclear Magnetic Resonance Gyroscope. J. Shanghai Jiaotong Univ. (Sci.) (2026). https://doi.org/10.1007/s12204-026-2896-y
https://blog.sciencenet.cn/blog-45888-1519024.html
上一篇:[转载]MSICPO-VMD驱动的风氢混合储能系统两阶段能量管理策略
下一篇:[转载]高灵敏度巨磁阻效应磁生物传感器与病原菌检测
