博文
[转载]Markov切换拓扑下通信时延异构车辆队列分布式模型预测控制
||
Markov切换拓扑下通信时延异构车辆队列分布式模型预测控制
穆建彬1,2,李刘洋1,何德峰1
(1. 浙江工业大学 信息工程学院,杭州310023;2. 南开大学 软件学院,天津300350)
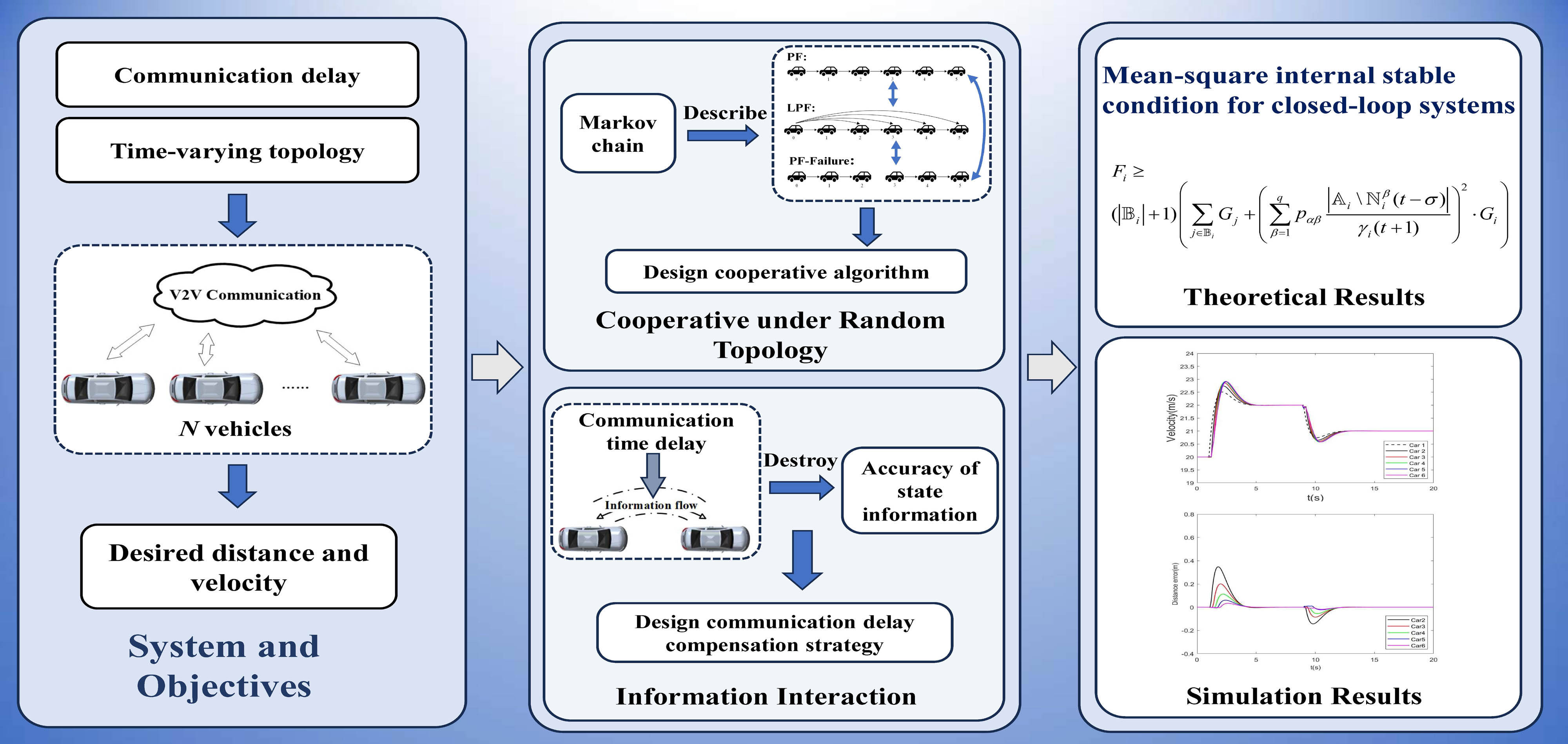
摘要:针对切换拓扑下存在通信时延的异构车辆队列系统,本文提出一种分布式模型预测控制(DMPC)算法。切换行为由马尔可夫链描述,并考虑时延存在上界且具有时变的性质。针对各车辆,设计一种补偿策略来修正从时变邻居集中所获邻居状态信息。然后,利用修正后的状态信息建立最优控制问题,并引入自偏差约束和修正信息约束以确保系统稳定性。通过定义基于联合邻居集的公共李雅普诺夫函数,建立与代价函数权重矩阵和通信拓扑转移概率相关的充分条件,实现了闭环系统均方内部稳定性。针对一些典型的交通场景进行了数值模拟,验证所提出的DMPC算法的有效性。
关键词:车辆队列,分布式模型预测控制(DMPC),Markov切换拓扑,通信延迟
扫二维码浏览全文

Cite this article
Mu, J., Li, L. & He, D. Distributed Model Predictive Control for Heterogeneous Vehicle Platoons with Communication Delay Under Markov Switching Topologies. J. Shanghai Jiaotong Univ. (Sci.) (2025). https://doi.org/10.1007/s12204-025-2892-7
https://blog.sciencenet.cn/blog-45888-1517719.html
上一篇:[转载]双向递归金字塔网络用于医学图像配准
下一篇:[转载]肺癌术后并发症的多模态融合预测

扫一扫,分享此博文