博文
[转载]微小型星表探测机器人发展综述
||
微小型星表探测机器人发展综述
董凯捷1,2,李子淇1,2,高明星3,张建华1,2 ,李端玲4
(1. 北京科技大学 机械工程学院,北京100083;2. 北京科技大学 顺德创新学院,广东佛山528300,广东;3. 北京控制工程研究所,北京100190;4. 北京邮电大学 智能工程与自动化学院,北京100876)
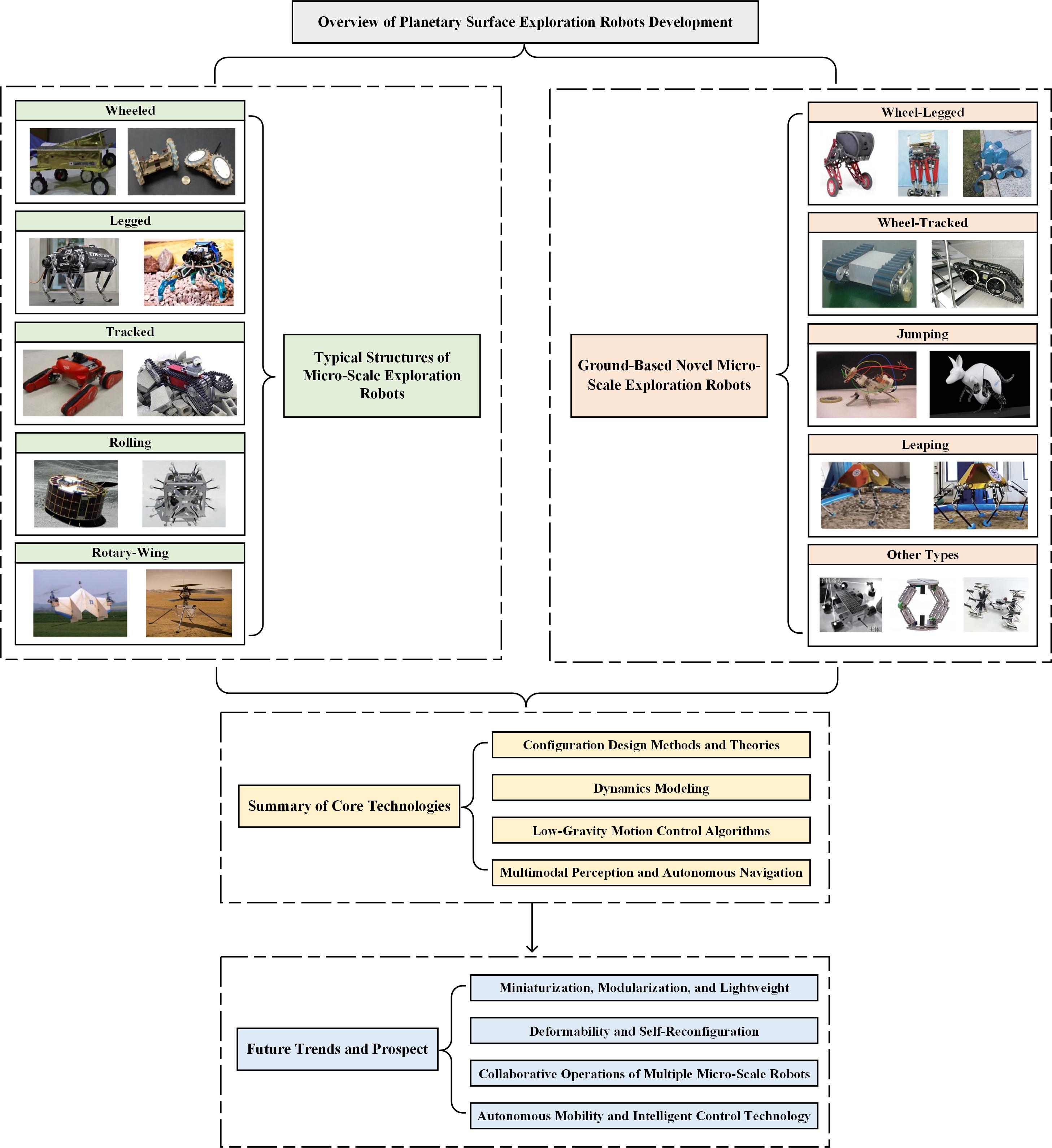
摘要:随着人类对宇宙探索的深入,微小型星表探测机器人已经成为了深空探测的重要工具。本文对国内外的探测机器人的发展历程进行了综述,并系统分析了各类典型微小型星表探测机器人的关键结构特点和应用,重点介绍了其技术特点和性能。此外,本文还重点介绍了新型探测机器人的最新研究进展,解决了设计和功能方面的创新。最后,讨论了微小型星表探测机器人的未来发展趋势和前景,强调了其将深空探测推向新领域的潜力。这项研究对推动中国航天事业的发展具有重要作用。
关键词:星表探测机器人,微小型移动机器人,深空探测,机器人结构
扫二维码浏览全文

Cite this article
Dong, K., Li, Z., Gao, M. et al. Review: Development of Micro-Scale Planetary Surface Exploration Robots. J. Shanghai Jiaotong Univ. (Sci.) (2025). https://doi.org/10.1007/s12204-025-2857-x
https://blog.sciencenet.cn/blog-45888-1507930.html
上一篇:[转载]面向几何复杂工件的力引导机器人装配策略及其在钢铁冶金自动化中的应用
下一篇:[转载]图卷积网络融合脑电与肌电用于上肢运动意图识别

扫一扫,分享此博文