博文
[转载]面向几何复杂工件的力引导机器人装配策略及其在钢铁冶金自动化中的应用
||
面向几何复杂工件的力引导机器人装配策略及其在钢铁冶金自动化中的应用
裴梓钧1,魏振红2,吴瑞珉2,陈卫东1
(1. 上海交通大学 自动化系,上海 200240;2. 宝山钢铁股份有限公司 技术中心,上海 201900)
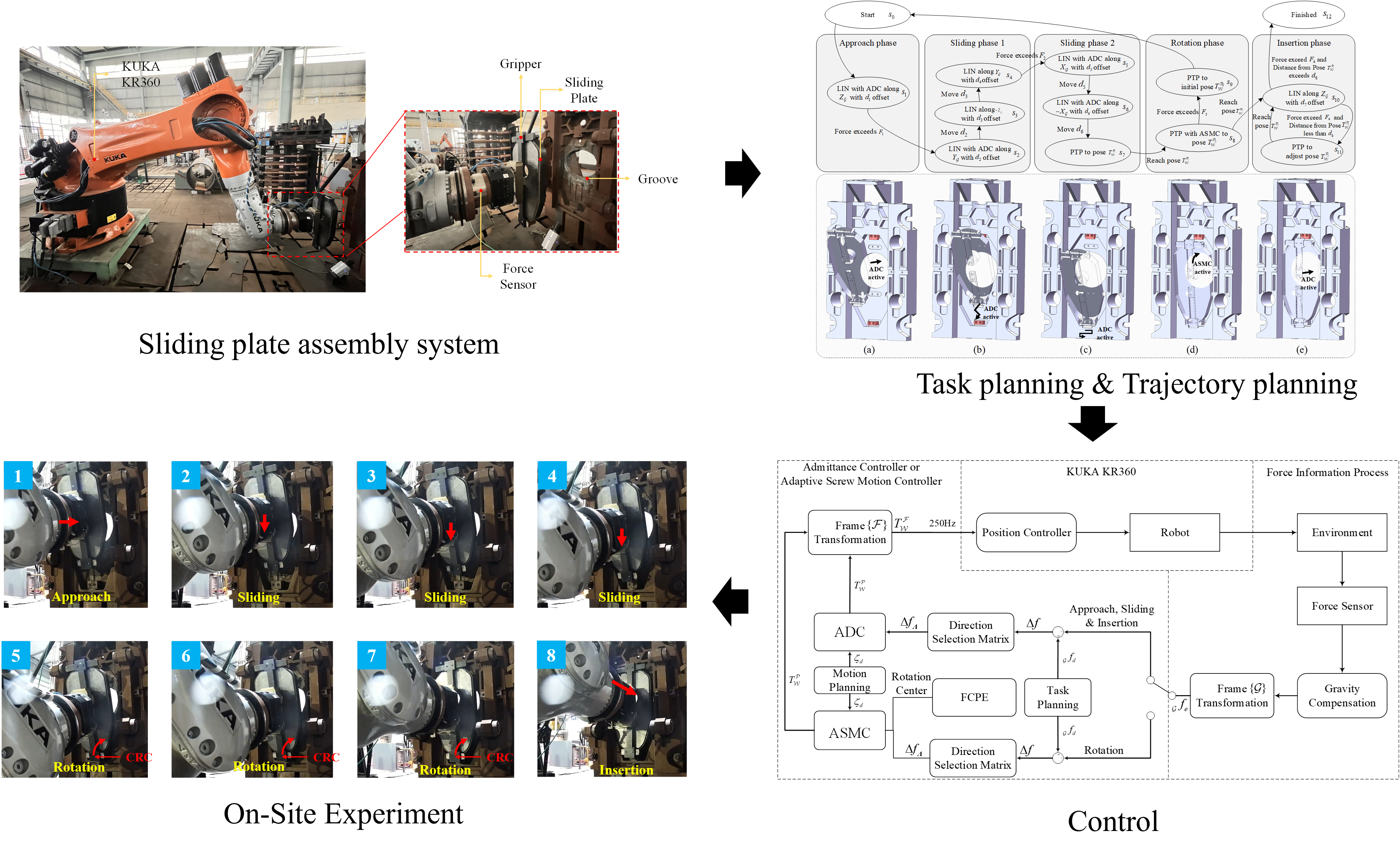
摘要:尽管在简单部件装配方面已有大量研究,但针对钢铁制造中复杂几何工件装配任务的研究仍然较为有限。这类任务具有高度复杂性、严苛的作业环境以及巨大的体力需求,因此亟需先进的自动化解决方案。为应对这些挑战,本文提出了一种面向钢铁行业中钢包滑动水口更换任务的四阶段机器人装配策略,特别聚焦于“槽中嵌板”(Plate-in-Groove, PiG)装配任务。PiG任务属于插孔类装配,要求机器人能够融合高精度的视觉与力感知能力。该方法首先通过基于交替方向乘子法的接触感知位姿估计重新估计工件的位姿,从而降低其在五个自由度上的误差。随后,在旋转阶段,通过力/力矩反馈驱动自适应螺旋运动控制器,动态调整滑板的旋转中心位置与角速度,以降低接触力。最后,插入过程由顺应性控制器完成。在整个四阶段装配框架中,系统迭代地最小化六自由度误差,从而提高装配成功率。实验结果验证了该方法在真实工业现场环境中的稳定性与鲁棒性。
关键词:槽中嵌板,装配任务,接触感知的位姿估计,导纳控制器,自适应螺旋运动控制器
扫二维码浏览全文
Cite this article 
Pei, Z., Wei, Z., Wu, R. et al. Force-Guided Robotic Assembly Strategy for Geometrically Complex Workpieces in Steelmaking Automation. J. Shanghai Jiaotong Univ. (Sci.) (2025). https://doi.org/10.1007/s12204-025-2860-2
https://blog.sciencenet.cn/blog-45888-1507761.html
上一篇:[转载]融合鸟瞰图特征的模仿与强化学习自动驾驶规划方法
下一篇:[转载]微小型星表探测机器人发展综述
