博文
[转载]混合UKF-GRU的车辆状态估计
||
混合UKF-GRU的车辆状态估计
俞润哲,吴晓东,鲁航宇
(上海交通大学 智能汽车研究所,上海200240)
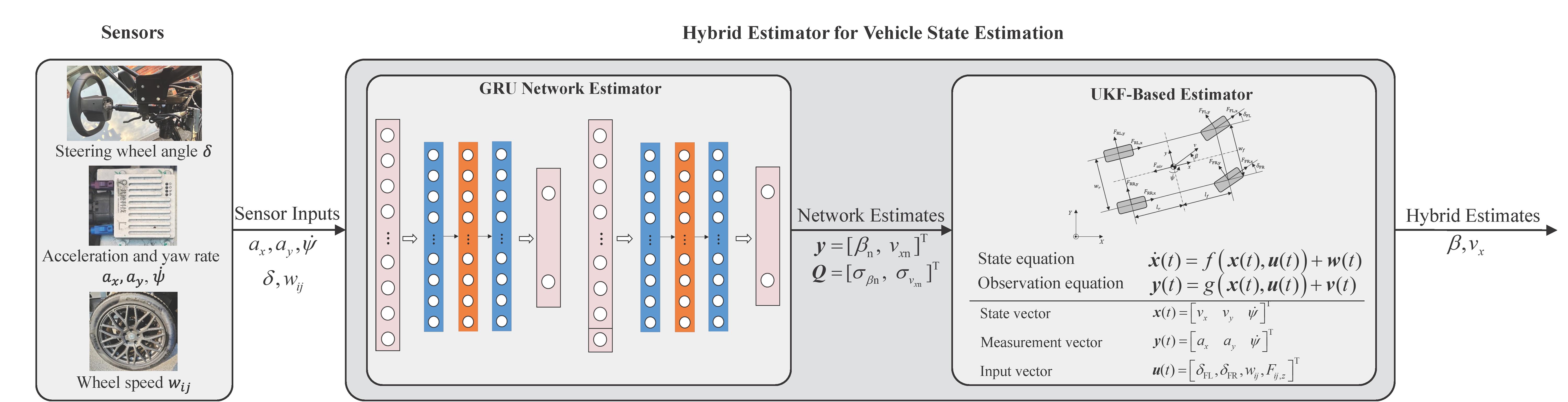
摘要:车辆状态的准确估计对于车辆运动控制与安全系统至关重要,能够在动态驾驶条件下实现精确操控与稳定性控制。本文提出了一种融合无迹卡尔曼滤波器(UKF)与门控循环单元(GRU)神经网络的混合状态估计方法,以提升车辆运动控制系统的精度与鲁棒性。该方法将神经网络的输出与基于模型的UKF相结合,实现对车辆状态的高精度估计。具体而言,估计网络通过GRU神经网络来处理传感器输入与时间序列数据,以预测车辆纵向速度、侧偏角及其相关不确定性。随后,UKF基于上述预测结果更新系统状态,并根据不同驾驶工况动态地调整对UKF与GRU估计结果的依赖程度,从而实现整体性能的最优化。大量的仿真测试与实车实验验证了所提出UKF-GRU方法的有效性,在估计精度与鲁棒性方面相较传统UKF方法及纯数据驱动方法均表现出显著提升。
关键词:车辆状态估计,无迹卡尔曼滤波,深度学习,门控循环单元
扫二维码浏览全文

Cite this article
Yu, R., Wu, X. & Lu, H. Hybrid UKF-GRU Approach for Vehicle State Estimation. J. Shanghai Jiaotong Univ. (Sci.) (2025). https://doi.org/10.1007/s12204-025-2854-0
https://blog.sciencenet.cn/blog-45888-1507474.html
上一篇:[转载]综合交通枢纽中城市轨道交通换乘的多模型预测与仿真
下一篇:[转载]融合鸟瞰图特征的模仿与强化学习自动驾驶规划方法

扫一扫,分享此博文