博文
基于贝叶斯优化的非线性模型预测控制调参:性能对比分析
||
Tuning nonlinear model predictive control via Bayesian optimization: a comparative performance analysis(基于贝叶斯优化的非线性模型预测控制调参:性能对比分析)
在复杂工业过程中,非线性模型预测控制(NMPC)因能够处理约束、多变量耦合和非线性动态而被广泛采用。然而,其性能高度依赖于代价函数中权重的选取:权重过小可能导致跟踪不足,过大又可能引发控制动作剧烈、资源消耗增加。传统调参依赖经验试错,在线自适应则常带来较高的计算负担。如何在保证控制性能的同时契合实际运行的经济目标,成为NMPC应用中的关键挑战。
针对这一问题,巴西巴伊亚联邦大学与圣卡塔琳娜联邦大学的研究团队提出了一种基于离线贝叶斯优化(BO)的NMPC权重整定方法。该方法以经济代价为优化目标,通过闭环仿真自动搜索最优权重组合,在提升控制平滑性的同时有效降低运行成本。
Tuning nonlinear model predictive control via Bayesian optimization: a comparative performance analysis基于贝叶斯优化的非线性模型预测控制调参:性能对比分析
作者:Maria Alice de F. Marques1, Juarez dos Santos Azevedo1, Julio Elias Normey-Rico2, Marcus V. Americano da Costa2
机构:1 Federal University of Bahia; 2 Federal University of Santa Catarina
引用:Marques, M.A.d.F., Azevedo, J.d.S., Normey-Rico, J.E. et al. Tuning nonlinear model predictive control via Bayesian optimization: a comparative performance analysis. Control Theory Technol.(2026). https://doi.org/10.1007/s11768-025-00315-0
摘 要
本文提出了一种利用离线贝叶斯优化(BO)来整定非线性模型预测控制器(NMPC)代价函数权重的新方法。作者提出了一种递归式权重选择方法,将BO直接嵌入NMPC仿真闭环中,并以经济代价函数为优化目标。该方法能够识别出使经济代价函数最优的权重,从而保证控制器性能与过程运行经济性相一致。本文通过一个具有非线性液位和温度动态特性的互联水箱系统案例来说明所提方法的有效性。研究测试了两种运行条件:无扰动场景,以及包含传感器噪声和模型—对象失配的扰动场景。在这两种场景下,经BO整定的NMPC均优于传统权重策略和基于“满意即止”准则的权重策略,并产生了更加平滑的控制动作。在扰动场景中,该方法最高可实现4.5%的成本降低。结果表明,基于离线BO的整定方法为人工调参或在线自适应调参提供了一种可行且鲁棒的替代方案,尤其适用于在线重新训练不切实际的系统。灵敏度测试进一步强调了合理选择搜索区间对于保证收敛性和控制性能的重要性。
引 言
模型预测控制(Model Predictive Control, MPC)通过模型预测系统未来行为,并在预测时域内求解优化问题,从而生成最优控制输入。MPC代价函数通常包含多个目标,例如输出跟踪误差、控制输入变化量和控制能耗等。因此,预测时域、控制时域以及代价函数权重都是影响控制性能的重要调节参数。对于多变量非线性系统而言,不同变量之间存在耦合,不同控制目标之间也存在冲突,使得权重整定成为一项具有挑战性的任务。
传统MPC调参通常依赖变量归一化、优先级排序以及操作人员经验。这类方法实现简单,但难以系统地兼顾跟踪性能、控制平滑性和经济成本。近年来,在线自适应MPC、学习型MPC以及实时优化框架被用于动态调整控制参数。这些方法能够适应时变工况,但也可能带来较大的在线计算负担。在快采样或复杂非线性系统中,在线优化和重新训练并不总是可行的。
与在线调参不同,离线整定方法在控制器部署前通过仿真或优化提前确定参数,能够降低在线运行时的计算压力。贝叶斯优化作为一种适用于昂贵黑箱函数优化的概率优化方法,可以在不需要梯度信息的情况下高效探索参数空间。它通过高斯过程建立代价函数的概率模型,并利用采集函数在“探索未知区域”和“利用已有较优区域”之间进行权衡,因而适合处理非凸、计算代价较高的NMPC权重优化问题。
本文提出一种两层式NMPC权重整定框架:内层为常规NMPC控制器,负责系统闭环控制;外层为离线BO优化器,通过多次闭环仿真评估不同权重组合对应的经济代价,并最终选取最优权重。与单纯把NMPC调参视为静态黑箱优化不同,该方法显式考虑闭环系统动态,并以经济指标作为权重搜索依据,从而实现面向实际运行成本的系统化调参。本文的主要贡献可概括如下:
提出了一种结构化的离线权重预整定方法。该方法通过引入多目标代价函数,区别于传统启发式方法和其他离线优化策略,能够为具体过程获得具有经济性的控制方案,从而提升NMPC的控制性能并减少资源消耗。
提出了一种高效、低成本的离线NMPC调参策略。该策略将贝叶斯优化融入NMPC整定过程,无需迭代调整,也无需引入神经网络来更新模型参数,从而降低了实现过程的计算复杂度,并在控制性能与经济成本之间实现了有效平衡。
基于加热水箱系统的非线性模型,将所提方法与包括一种迭代方法在内的其他方法进行了比较分析。结果展示了所提方法的优势,并表明在在线权重自适应可能不可行或不必要的经济控制场景中,该方法具有良好的可行性。
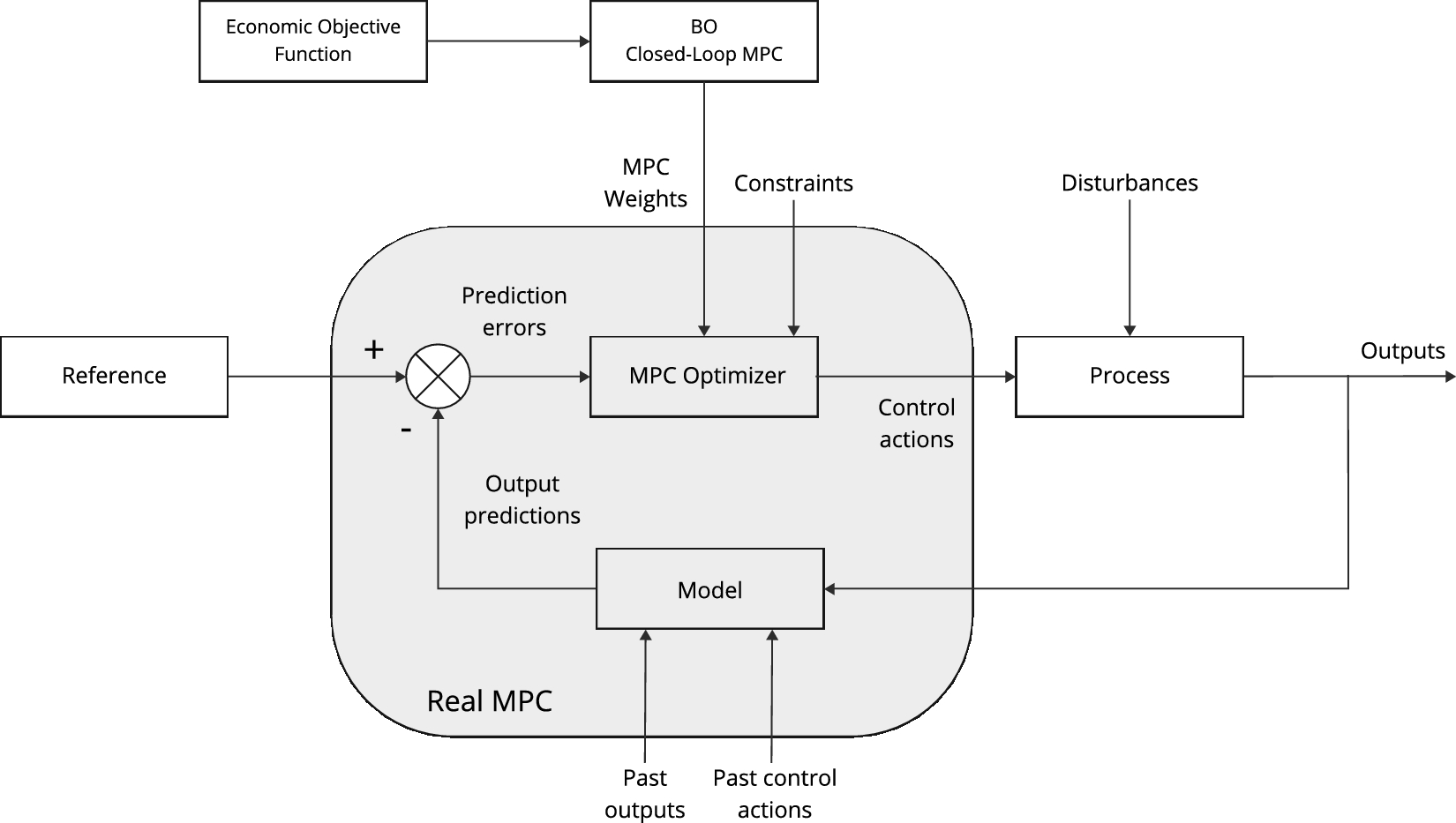
图1 (原文Fig. 1) 本文采用的预测控制器架构
结 论
本文提出一种将经济准则与贝叶斯优化(BO)相结合、用于整定NMPC代价函数权重的新方法。通过一个非线性液位-温度互联水箱系统的案例,与传统权重方法和基于“满意即止”准则迭代方法进行了对比。
结果表明BO方法能够获得更优的经济性能,在存在随机扰动时,其自适应搜索过程可实现更有效的权重调整。BO的离线优化特性不会给实时控制器增加额外计算负担。尤其在不确性条件下,基于BO的NMPC权重整定能保持更优性能,扰动场景中最高可实现4.5%的成本降低。
当前方法仍存在一些局限,BO整定基于固定标称模型,限制了面对未知运行场景时的泛化能力;权重初始化区间过大可能导致次优解;参数不确定性未在整定过程中显式建模。未来研究包括在真实工业环境中验证该方法,以及与自适应或学习型MPC框架的结合。
作者介绍
Maria Alice de F. Marques 是一名Federal University of Bahia 机电一体化研究项目的博士生,获得了Regional University of Cariri 教育专业的硕士学位,主修高等教育教学方法学,于2008年获得Federal Institute of Education, Science, and Technology of Ceará 的工业机电一体化技术学位。目前,她是Federal Institute of Education, Science, and Technology of Sertão Pernambucano 的终身教授,在该校开展电子、自动化以及职业教育教学实践方面的研究项目。
Juarez dos Santos Azevedo 于2001年获得了State University of Feira de Santana 的数学学士学位,2003年获得了Federal University of Bahia 的纯数学硕士学位,2009年获得了Federal University of Bahia 的应用地球物理学博士学位。现任Federal University of Bahia的科学、技术与创新系副教授,研究方向包括数学建模、高级统计方法、贝叶斯推断,以及其在反问题、计算地球物理和能源系统中的应用。
Julio Elias Normey-Rico 是Federal University of Santa Catarina自动化与系统工程研究生项目负责人,1999年获得University of Seville 的博士学位。他的主要研究方向包括模型预测控制、时滞过程控制、PID控制、可再生能源与优化。他长期与能源领域企业开展创新合作,推动先进控制与优化系统在工业过程、海上石油平台运行和可再生能源系统中的应用。
Marcus V. Americano da Costa 于2005年获得Federal University of Bahia电气工程学士学位,2008年获得Federal University of Santa Catarina硕士学位,并于2013年获得该校自动化与系统工程博士学位。目前,他是Federal University of Santa Catarina的控制与自动化工程正教授,曾在the University of South Florida (美国) 担任访问教授,并曾在the University of Almería从事研究工作。他已发表70余篇自动控制及相关方向论文和技术报告,研究兴趣包括最优控制、反馈控制系统分析与设计、建模与高级仿真、工程教育,以及面向可再生能源、生物乙醇工业和健康领域的自动化系统应用。
相关链接
Control Theory and Technology 2024-2025年期刊合集(中文介绍)
2024-2025刊期合集(英文)
Volume 23 (February - November 2025)
Issue 3, 2025 - Special issue on ADRC: New ADRC developments in Ibero-America
Volume 22 (February - November 2024)
Issue 3, 2024 - Special issue on analysis and control of complex systems in honor of the 90th birthday of Professor Huashu Qin
Issue 2, 2024 - Special issue on system identification and estimation
期刊简介


欢迎扫码进入期刊主页
Control Theory and Technology (CTT), 中文名《控制理论与技术》, 创刊于2003年,原刊名为Journal of Control Theory and Applications,2014年刊名更改为Control Theory and Technology。由华南理工大学与中国科学院数学与系统科学研究院联合主办,主要报道系统控制科学中具有新观念、新思想的理论研究成果及其在各个领域中的应用。目前被 ESCI (JIF 1.5)、EI、Scopus (CiteScore 3.2)、CSCD、INSPEC、ACM 等众多数据库收录, 并于2013–2018年获得两期中国科技期刊国际影响力提升计划项目资助。2017–2021年连续获得“中国最具国际影响力学术期刊”和“中国国际影响力优秀学术期刊”称号,获得广东省高水平科技期刊建设项目I期(2021-2024年)和II期,2022-2025年进入中国科协自动化学科领域高质量科技期刊目录。
官网:https://link.springer.com/journal/11768 (即http://www.springer.com/11768)
https://jcta.ijournals.cn/cta_en/ch/index.aspx
投稿:https://mc03.manuscriptcentral.com/ctt
微信:ControlTheoryTech (欢迎扫码关注期刊微信公众号)

X (Twitter): CTT_Journal
微博:ControlTheoryTech
Email:jcta@scut.edu.cn
Tel:020-8711 1464
https://blog.sciencenet.cn/blog-3635716-1535749.html
上一篇:一种用于动态和含噪非线性优化问题的混合积分递归神经网络框架
下一篇:一类Ψ-Caputo型时间分数阶分布参数线性系统的可观测性
