博文
【论文推荐】基于MESEN的机械臂运动预测控制
||
编辑荐语
本期将给大家分享"基于MESEN的机械臂运动预测控制(Predictive control of robotic arm motion based on MESEN)". 如您对本期相关内容有好的理解与建议, 欢迎评论区留言.
本文针对多轴机械臂运动控制中大规模约束优化求解效率低、对初始偏差敏感等核心难题, 提出了一种基于改进增强型牛顿法(MESEN)的预测控制框架. 研究通过结合终端代价与终端约束的增强型迭代模型预测控制策略, 构建了具有严格稳定性保证的位置跟踪控制器; 进而创新性地设计了MESEN算法, 在原有误差求和增强牛顿法(ESEN)中引入重复控制项, 通过自适应调节优化步长与模型参数, 显著提升了滚动优化过程的收敛速度与数值稳定性, 降低了对系统初始条件的依赖. 理论分析基于Lyapunov方法证明了算法的收敛性, 并在六轴机械臂实验平台上验证了所提方法在处理复杂约束时的优越性能. 该研究为高自由度机械臂实时运动控制提供了一种高效、稳定的优化求解新途径, 对提升复杂工业场景下机械臂的轨迹精度与动态响应具有重要理论与应用价值.
本文算法设计清晰, 理论分析严谨, 实验验证充分, 所提出的MESEN算法在提升预测控制优化效率方面具有明显创新. 推荐给从事机器人运动控制、模型预测控制、实时优化算法研究的科研人员与工程师阅读参考.
论文介绍
基于MESEN的机械臂运动预测控制
Predictive control of robotic arm motion based on MESEN
平梦玲, 刘斌†, 何芳, 刘德旺, 余梦琪
机构: 南昌航空大学 信息工程学院
引用: 平梦玲, 刘斌, 何芳, 等. 基于MESEN的机械臂运动预测控制. 控制理论与应用, 2025, 42(12): 2497 – 2507
DOI: 10.7641/CTA.2025.40369
全文链接:
http://jcta.alljournals.ac.cn/cta_cn/ch/reader/view_abstract.aspx?file_no=CCTA240369&flag=1
摘要
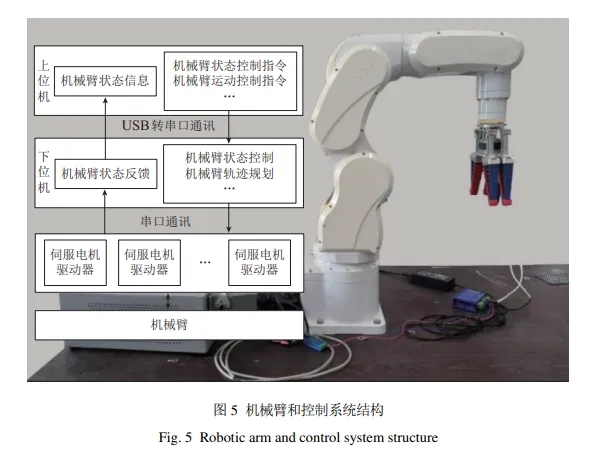
针对机械臂运动控制问题, 首先建立与实体机械臂对应的DH参数表以及运动学方程, 其次利用运动学设计机械臂的位置预测控制器, 然后针对控制器模型的凸优化问题, 引入终端代价及终端约束, 采用增强型迭代模型预测控制策略来实现多轴机械臂运动控制. 并采用误差求和增强型牛顿法来提升滚动优化过程中的迭代效率. 此外, 还提出了一种MESEN算法, 通过有效控制算法步长以及模型中相关系数的大小, 进一步提高系统的收敛速度, 减少优化过程对系统初始偏差的依赖. 最后, 利用Lyapunov定理对MESEN算法的收敛性进行分析, 并对六轴机械臂进行实验验证. 实验结果表明, 所提算法在大规模约束的模型中具有较好的效果.
引言
工业生产自动化推进机械臂在工业领域的广泛应用, 串联型机械臂在面对复杂任务时, 自由度会随着关节数的增加而增加, 导致机械臂关节旋转角度的限制和避碰的范围增大[1]. 针对上述问题, 如何建立机械臂模型以及如何控制机械臂运动逐渐成为研究中的重点. 机械臂运动规划包含路径规划和轨迹优化[2–4], 运动规划的核心问题是通过已知条件求解逆运动学的问题, 针对该问题, 世界各国也正在积极探索多轴机械臂路径控制和优化方法[5–6]. 根据规划范围还可以分为局部和全局路径规划[7–8]. 其中, 局部路径规划主要针对机械臂当前作业的局部空间信息, 具有良好的动态规划性能, 对噪声干扰大的环境有较强的鲁棒性, 但对机械臂硬件要求较高且缺乏全局环境信息导致规划结果不佳; 全局路径规划在已知的环境中可以找到最优解, 但当面对动态路径时, 无法及时做出相应的校正, 实时性较差.
在工业中应用最广泛的是模型预测控制(model predictive control, MPC)[9–10], 该模型通用性强, 能实时滚动优化, 能够解决大规模约束问题的同时, 具有良好的追踪性能和较强的抗干扰能力等特性. 借助预测控制的优势, 文献[11]将贝叶斯神经网络和模型预测控制相结合, 精确机械臂的模型同时保证机械臂作业过程中的安全性, 通过分层的模型预测控制策略识别并利用不确定信息来预测下一时刻的状态; 文献[12]提出了一种新型自适应模糊模型预测控制器, 该控制器可在水下环境中高效运行, 并能大大减少计算负担. 针对机械臂在复杂环境下难以实现高精度运动跟踪的问题, 文献[13]提出基于自适应动态规划与滑模导纳控制相结合的最优控制方法, 并对价值函数中R矩阵进行了优化改进, 提升了跟踪精度. 对输入最大或最小时 PID 无法完整跟踪参考信号的问题, 文献[14]将MPC与PID算法进行比较, 证明在输入信号达到饱和时, MPC仍然具有完整且良好的信号跟踪能力. 即使MPC在工业界的应用已经非常广泛, 但是对于大规模约束的复杂系统, 模型求解以及迭代优化的问题, 成为了当下凸优化问题研究中的难点. 针对凸优化求解的问题, 文献[15]提出的误差求和增强牛顿法(error-summation enhanced Newton, ESEN) 结合增强型Newton迭代法, 使得约束条件不仅能满足系统本身的优化问题还能满足稳定性和收敛性的要求. 其中的积分项在应对常值干扰时, 有不错的效果, 但在面对动态系统中的扰动时, 其抑制效果却难以保持.
针对上述问题, 本文引入预测控制方法去规划路径以及优化轨迹, 并且提出 MESEN(modified ESEN)算法, 在原算法的基础上加入了重复控制项, 能够更好的跟踪动态系统, 减少滚动优化过程中对系统初始偏差的依赖性.
结论
本文首先根据六轴机械臂运动学原理设计了六轴机械臂路径跟踪控制器, 在运动控制模型中增加了约束条件, 并将一般模型转化为含有约束的标准模型. 然后通过调节各权重系数以及终端权重系数更新局部变量, 进而更新全局变量, 进行下一次迭代优化, 使得整个系统处于稳定且能时刻更新的状态. 最后通过实验验证, 该算法使多轴机械臂运动系统的收敛速度更快且提高了机械臂运动系统的精确性和稳定性. 本文所提算法提高了模型计算的效率, 同时也提高了系统的稳定性和收敛性, 但未能对动态环境下的干扰进行避障算法设计.
未来将在本文基础上对动态环境干扰下的避障算 法进行探究.
作者简介
平梦玲 硕士研究生, 目前研究方向为约束预测控制在机械臂控制方面的应用;
刘 斌 教授, 研究生导师, 目前研究方向为预测控制理论及方法;
何 芳 硕士研究生, 目前研究方向为智能机器人的轨迹跟踪控制;
刘德旺 硕士研究生, 目前研究方向为约束预测控制在机械臂控制方面的应用;
余梦琪 硕士研究生, 目前研究方向为自适应控制及其应用.
期刊介绍
《控制理论与应用》(Control Theory & Applications)是经国家科学技术部批准, 教育部主管, 由华南理工大学和中国科学院数学与系统科学研究院联合主办的全国性一级学术刊物, 1984年创刊, 月刊, 国内外公开发行. 《控制理论与应用》是中国科学引文数据库首批统计源期刊之一,中文核心期刊,入选中国精品科技期刊顶尖学术论文F5000项目,中国科协自动化学科领域高质量科技期刊目录以及中国科协百篇优秀科技论文遴选计划,2021年入选广东省高质量科技期刊建设项目,2022-2024年连续获得基金委资助(科技活动专项)。


【收录】
目前被美国《工程索引》(Ei Compendex)、SCOUPS、CSCD、美国的《化学文摘》(CA)、英国《科学文摘》(Inspec)、德国《数学文摘》、俄罗斯《文摘杂志》(AJ)、《日本科学技术振兴机构中国文献数据库》等国内外检索系统收录。
官网:https://jcta.ijournals.cn/cta_cn/ch/index.aspx
知网优先发表:https://navi.cnki.net/knavi/journals/KZLY/detail
投稿:https://jcta.ijournals.cn/cta_cn/ch/author/login.aspx
微信:控制理论与应用
视频号:控制理论与应用
科学网博客:http://blog.sciencenet.cn/u/CTACTT
小红书:控制理论与应用(ID:8742781006)
Email:aukzllyy@scut.edu.cn
Tel:020-8711 1464

欢迎扫码关注控制理论与应用公众号
【2024-2025年期刊合集】
2025年第42卷第11期(“新一代智能优化理论方法与应用暨纪念郑大钟教授诞辰90周年”专刊)
2024年第41卷第7期(“秦化淑教授90寿诞—复杂系统控制理论及其应用”专刊)
2024年第41卷第6期(“数据与模型融合的智能调度优化”专刊)
2024年第41卷第3期(“人工智能驱动的过程工业自动化与智能化”专刊)
https://blog.sciencenet.cn/blog-3633987-1519065.html
上一篇:【论文推荐】不确定扰动下的打磨机器人动态轨迹规划
下一篇:《控制理论与应用》2025年期刊合集
