博文
智能网联无人系统云控制平台的关键理论与技术
|
引用本文
夏元清, 刘丹阳, 杨洪玖, 于东东, 高润泽. 智能网联无人系统云控制平台的关键理论与技术. 自动化学报, 2026, 52(2): 240−253 doi: 10.16383/j.aas.c250423
Xia Yuan-Qing, Liu Dan-Yang, Yang Hong-Jiu, Yu Dong-Dong, Gao Run-Ze. Key theories and technologies of cloud control platform for intelligent connected unmanned systems. Acta Automatica Sinica, 2026, 52(2): 240−253 doi: 10.16383/j.aas.c250423
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250423
关键词
智能网联无人系统,云控制系统,数字孪生,云网边端协同架构,智慧城市
摘要
针对智慧城市中无人系统因通信架构不统一、任务调度效率低下及数字孪生技术难以支撑实时全局决策所导致的跨域协同难题, 融合云控制系统理论与数字孪生技术, 基于云网边端协同云控制架构, 构建智能网联无人系统云控制平台及关键理论与技术体系. 该体系涵盖云控制系统综合建模、模型−数据联合驱动控制、多运动体跨域协同云控制等关键理论, 研究数字孪生系统、容器化云工作流调度系统、动态云控制系统、远程驾驶系统等关键技术. 在校园场景下部署无人机、无人车、无人船、机器人等异构无人系统, 形成空基、地基、海(水)基动态云并实现跨域协同, 结果验证了所提理论体系的可行性与有效性, 为未来智慧城市发展与跨域无人系统协同应用提供理论支撑与技术路径.
文章导读
随着智慧城市进入以数据驱动与万物互联为特征的新阶段, 城市交通正从传统的二维交通模式向空地协同的立体式交通网络演进, 催生以无人机物流、空中出租车等为核心的低空经济新业态. 这种演进使得传统二维、孤立部署的城市感知与管控体系已难以满足跨域、异构、大规模终端的协同需求[1]. 在应急响应、智慧交通、环境治理等典型场景中, 城市运行对多维度感知、快速决策与精细调控的需求日益增长, 亟须新型综合性技术体系支撑. 近年来, 以无人机、无人车、无人船与机器人为代表的智能无人系统快速发展, 并逐步融入城市治理. 但多数应用场景仍局限于单一领域, 缺乏跨域协同能力[2−3]. 与此同时, 数字孪生技术[4−5]作为实现物理实体与虚拟空间高保真映射的重要手段, 已在工业制造与建筑设计等领域展现出巨大潜力[6], 但在城市级动态环境下的应用仍面临诸多挑战[7]. 面对海量异构数据处理与跨域协同控制的复杂需求, 云控制系统作为网络化控制系统的升华, 为解决上述问题提供了新思路. 如何有效融合云控制系统与数字孪生技术, 构建覆盖“天−空−地−海(水)”一体化跨域协同无人系统云控制平台, 实现跨域协同与智能决策, 已成为智慧城市发展的前沿问题.
国外对智慧城市中无人系统与数字孪生技术的研究起步较早, 并已形成较为系统的技术框架. 欧美国家自20世纪末开始探索无人驾驶与无人机在交通监测、物流配送等场景中的应用, 并逐步拓展至空地协同的系统性应用. 近年来, 随着人工智能、边缘计算和5G技术的推动, 跨域无人系统逐渐走向城市级部署. 例如, 欧盟“Smart City”计划推进数字孪生城市建设, 通过多源数据融合与可视化建模, 实现能源与交通等关键领域的协同调度[8−9]; 美国则在无人机与自动驾驶协同方面具有领先优势, 建设面向智慧交通与应急救援的管控平台[10−11].
我国在智慧城市建设和无人系统应用方面起步相对较晚, 但发展迅速. 近年来, 我国陆续发布 《关于深化智慧城市发展 推进城市全域数字化转型的指导意见》[12]、《关于推进新型城市基础设施建设打造韧性城市的意见》[13] 等政策文件, 为无人系统、低空经济和数字孪生技术在智慧城市中的应用提供战略指引. 在应用层面, 北京、上海、深圳等地已经开展自动驾驶示范区建设, 实现城市道路无人车的规模化运行[14−15]; 在低空经济领域, 广州、合肥等地建立无人机监管与配送示范平台, 推动无人机在应急救援、物流配送和城市巡检中的常态化应用[16−17]; 在智慧港口和内河航运中, 部分试点城市已部署无人船与数字孪生技术水域模型, 实现智能航运和水域监测的初步探索[18−19]; 在智能制造领域, 深圳、佛山等地建设工业机器人应用示范区, 实现工业机器人在精密装配、质量检测和柔性生产中的规模化部署. 总体而言, 我国在单一领域的无人系统应用方面已具备一定规模, 但仍存在以下不足: 跨域协同能力有限, 低空经济、地面交通与水域航运之间未形成高效互联; 数字孪生技术多停留在可视化层面, 缺乏对复杂动态环境的精准映射与智能决策支持; 立体交通的标准体系仍不完善, 难以实现大规模推广. 因此, 亟须探索跨域协同无人系统与数字孪生技术, 以推动智慧城市的可持续发展.
随着智慧城市建设迈入以数据驱动和跨域协同为特征的新阶段, 单一领域的无人系统已难以满足城市运行的复杂需求, 而现有的数字孪生技术也尚未形成对无人系统的全面支撑. 为此, 本文聚焦跨域协同无人系统与数字孪生技术融合, 并整合无人机、无人车、无人船与机器人等异构无人系统, 构建覆盖“天−空−地−海(水)”一体化跨域协同无人系统云控制平台. 主要贡献包括: 1)设计适用于智能网联无人系统云控制平台的云网边端协同架构, 解决异构无人系统的接入与统一管理问题; 2)实现数字孪生系统, 涵盖多源数据融合、三维模型构建与动态映射, 提供全局感知与交互功能; 3)集成容器化工作流调度系统、动态云控制系统与远程驾驶系统, 实现复杂任务的高效编排与安全接管; 4)在大学校园环境中完成无人系统的部署, 围绕低空巡检、智慧交通与水域巡逻等任务开展应用验证.
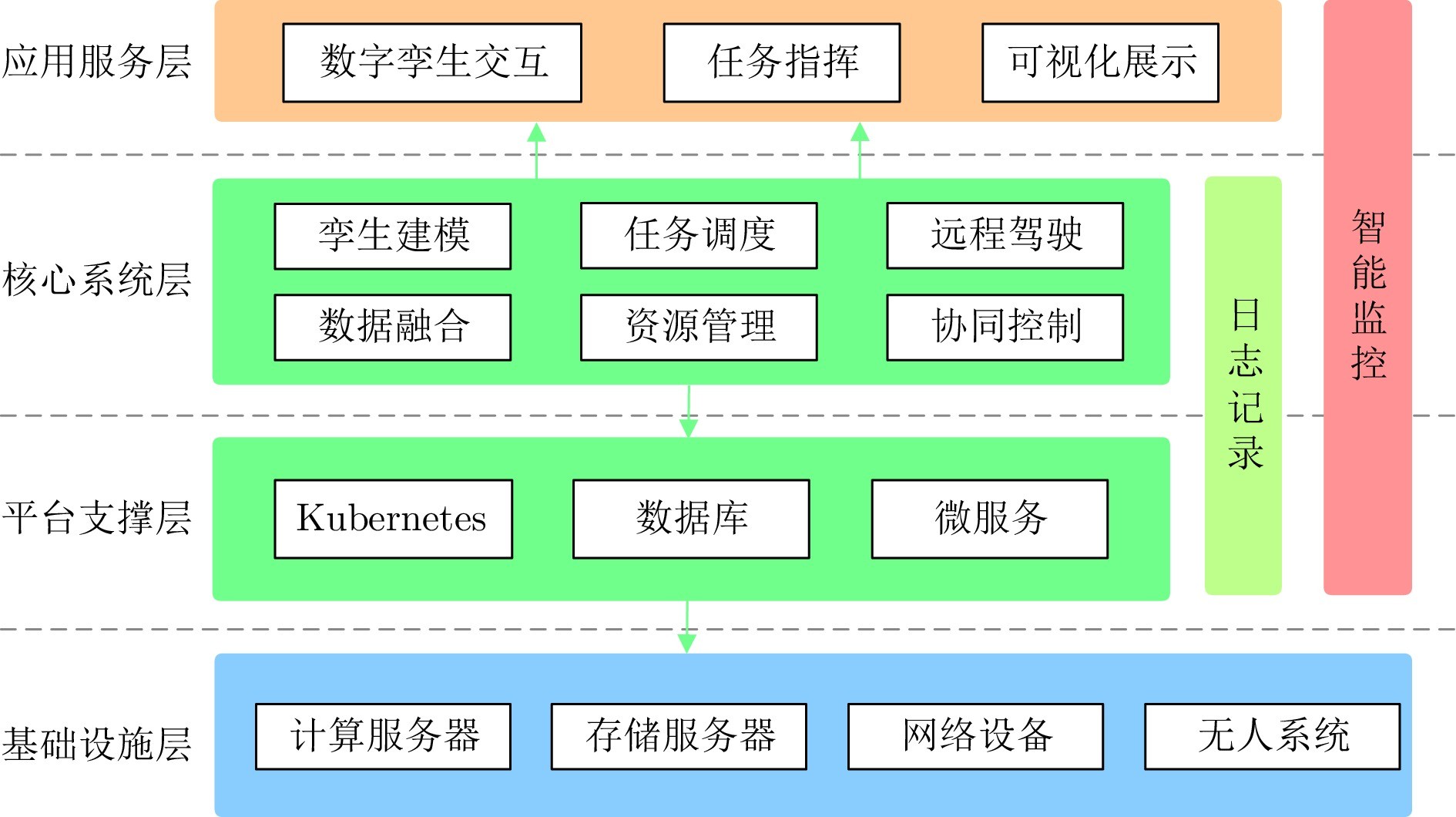
图1 智能网联无人系统云控制平台架构
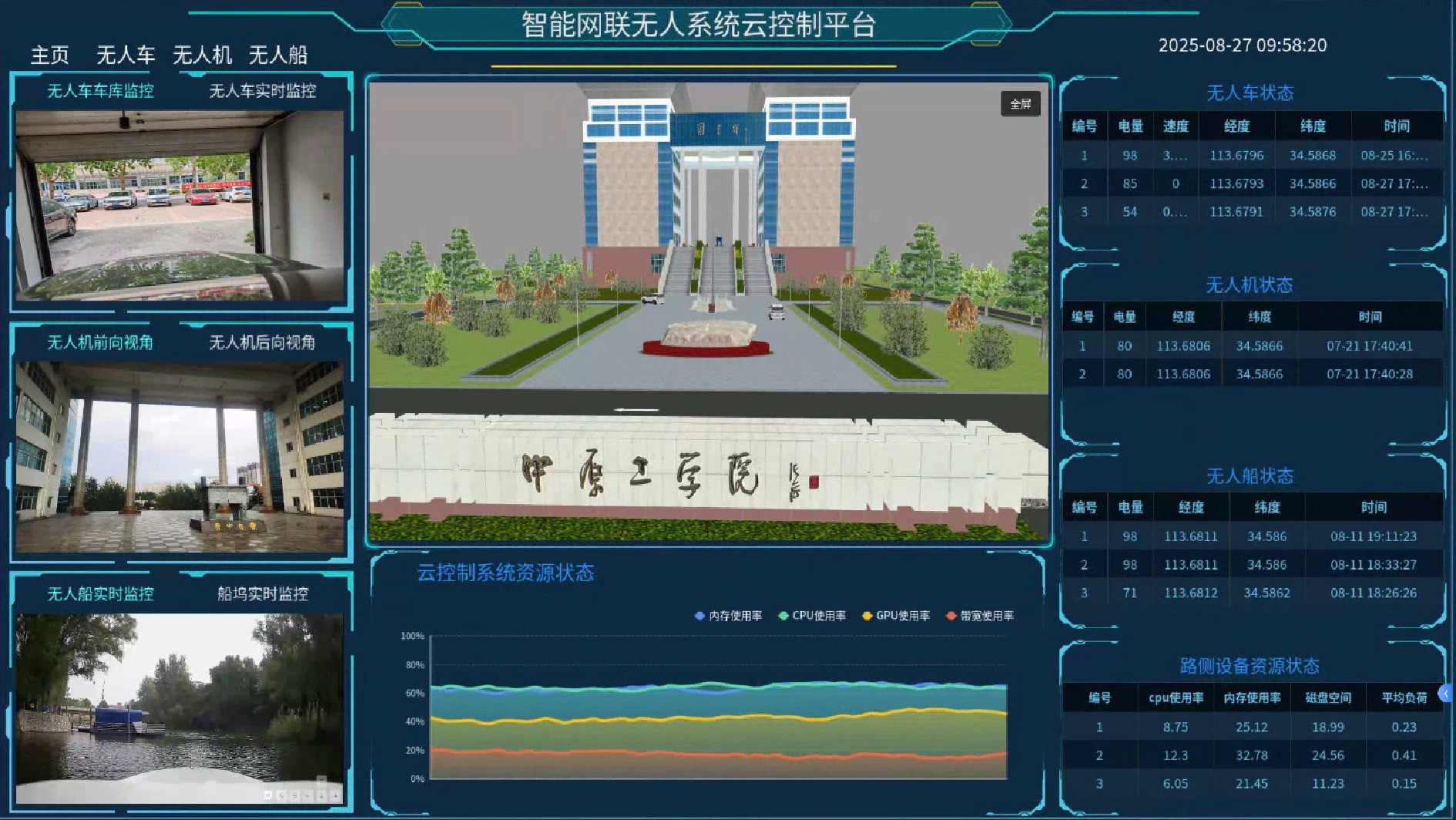
图2 智能网联无人系统云控制平台可视化界面

图3 无人车数字孪生场地
智慧城市的复杂运行需求对跨域感知、智能调度和协同作业提出了更高要求. 本文提出并实现了智能网联无人系统云控制平台, 该平台整合无人车、无人机、无人船与机器人等异构无人系统, 构建了覆盖“天−空−地−海(水)”一体化跨域协同无人系统. 其中, 由卫星等空间飞行器组成的天基云和智能网联卫星云控制系统正在构建中. 本平台通过云控制系统与数字孪生技术的结合, 实现了多源感知、实时交互与高效调度. 未来, 将优化无人系统的协同调度算法, 并引入深度强化学习等智能算法, 以提升无人系统在大规模、高动态任务环境下的自主决策能力与执行效率. 同时, 将在数字孪生系统中引入更高保真度的物理引擎与环境交互模型, 以增强系统的仿真精度与预测能力. 此外, 将探索自适应通信与动态组网技术, 以确保无人系统在极端环境下实现可靠的指挥控制与数据回传. 基于提出的平台架构, 城市治理有望实现更加高效的资源调配与运行管理, 为建设安全、绿色、智慧的城市生态系统奠定基础.
作者简介
夏元清
中原工学院校长, 北京理工大学讲席教授. 主要研究方向为云控制系统, 网络化控制系统, 鲁棒控制与信号处理, 自抗扰控制, 无人系统控制和飞行控制. E-mail: xia_yuanqing@bit.edu.cn
刘丹阳
北京理工大学自动化学院博士研究生. 主要研究方向为云控制系统, 云计算, 云边协同和分布式系统. E-mail: liu_danyang@bit.edu.cn
杨洪玖
天津大学电气自动化与信息工程学院教授, 中原工学院自动化与电气工程学院教授. 主要研究方向为鲁棒控制, 滤波理论, delta算子系统, 网络化控制系统和自抗扰控制. 本文通信作者. E-mail: yanghongjiu@tju.edu.cn
于东东
中原工学院自动化与电气工程学院助理教授. 主要研究方向为多传感器信息融合, 分布式状态估计, 信号处理和非线性滤波. E-mail: dongdoyu@163.com
高润泽
北京理工大学自动化学院博士后. 主要研究方向为云控制系统, 模型预测控制和数据驱动预测控制. E-mail: runze_gao@bit.edu.cn
https://blog.sciencenet.cn/blog-3291369-1525670.html
上一篇:城市空中交通系统最优规模评估与调度
下一篇:无人机引导下多消防机器人协同作业
