博文
单向通信下多队列车辆轨迹同步的DMPC控制器设计
|
引用本文
王正武, 文强, 吴锯强. 单向通信下多队列车辆轨迹同步的DMPC控制器设计. 自动化学报, 2025, 51(9): 2085−2105 doi: 10.16383/j.aas.c240760
Wang Zheng-Wu, Wen Qiang, Wu Ju-Qiang. DMPC controller design for trajectory synchronization of multi-platoon vehicles under unidirectional communication. Acta Automatica Sinica, 2025, 51(9): 2085−2105 doi: 10.16383/j.aas.c240760
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240760
关键词
自动驾驶,分布式模型预测控制,多队列系统,通信拓扑结构
摘要
针对多队列系统中的车辆编队协同控制问题, 研究在单向通信结构下实现高效队列协同的方法. 首先, 建立多队列系统的车辆动力学模型, 设计以各队列领航车为根节点的全局通信拓扑, 以支持信息在队列内和队列间的传递. 基于此拓扑结构, 提出一种包含队列内和队列间耦合约束的分布式模型预测控制方法, 分别针对队列内跟随车辆和队列间领航车辆制定不同的局部优化问题, 以实现车辆和队列的并行优化. 其次, 通过Lyapunov稳定性分析, 证明所提控制方法在单向通信拓扑下的渐近稳定性, 并推导保证系统弦稳定性的参数设计条件. 数值仿真对比分析了三种队列间通信拓扑结构(领航车−尾车跟踪、领航车−领航车跟踪、领航车与领航车−尾车结合策略)的控制性能. 结果表明, 领航车与领航车−尾车结合策略在响应速度和系统稳定性之间达到最佳平衡. 此外, 研究还验证了所提方法对不同惯性滞后参数和异质车辆特性的适应能力, 为多队列车辆系统的协同控制提供理论基础和实用方法, 对智能交通系统的实际应用具有重要参考价值.
文章导读
随着现代交通运输与智能物流系统的快速发展, 大规模队列的协同控制成为智能交通领域的重要研究方向. 如何在多样化交通场景中实现车辆队列的高效协同, 保证同步性与稳定性, 不仅关系到交通效率的提升, 还对交通安全具有重要意义[1]. 尤其是在单向通信结构下, 如何克服信息延迟与动态变化的影响, 实现多队列系统的稳定控制, 已成为当前研究的核心问题.
针对多队列系统的协同控制, 学者们提出多种通信拓扑优化方法, 以减轻传输延迟和车辆动力学对控制性能的负面影响. 例如, 文献[2]提出一种在单向通信拓扑下联合优化控制器与通信结构的设计方法, 显著提升队列的弦稳定性并有效抑制扰动传播. 文献[3]研究无向信息流拓扑下通信信道衰落对稳定性的影响, 并通过采样控制协议提高队列内稳定性. 文献[4]系统分析通信延迟对队列弦稳定性的影响, 重点讨论双向拓扑的动态特性及延迟补偿方法. 与此同时, 基于车载通信(Intelligent vehicle communication, IVC)的队列控制策略也得到广泛研究, 如文献[5]通过减缓通信延迟问题, 提高交通流的安全性与效率. 这些研究表明, 优化通信拓扑对提高队列系统响应速度和稳定性具有关键作用, 尤其在单向通信的多队列环境中, 通过合理设计通信结构可有效提升系统性能[6]. 除单一拓扑优化, 研究者们也关注不同通信拓扑结构对系统整体稳定性的影响. 文献[7] 提出一种面向切换拓扑的分布式模型预测控制算法, 有效应对时间延迟和通信中断等问题, 提高队列的稳定性和响应性能. 文献[8]基于蜂群优化算法改进队列延迟性能, 显著提升通信效率与响应速度. 这些研究表明, 通信拓扑的合理选择需综合考虑延迟、动态约束和拓扑切换等因素, 以保障系统的全局稳定性.
而在多队列系统的协同控制中, 除需要保持队列内的紧密编队, 还需应对队列间的通信延迟和动态变化的挑战. 这一领域的研究主要集中在以下几方面. 首先, 为解决队列间通信延迟的问题, 许多研究引入多智能体一致性理论的控制方法. 传统的多智能体控制方法(如一致性控制、同步控制、跟随控制等)通常侧重于在多个智能体之间实现相同目标的协调和同步, 重点确保智能体之间的行为一致, 这些方法大多侧重于单一智能体或较简单的多智能体系统, 如文献[9]通过非线性一致性控制算法, 能够在时间延迟条件下实现队列的一致性和稳定性. 文献[10−11]通过异质车辆的非线性控制方法解决通信延时对车辆一致性和稳定性的影响. 文献[12]研究动态事件触发机制的一致性控制方法, 通过引入动态变量减少通信触发次数, 从而有效应对通信延迟问题, 这些研究在面对复杂的多队列协同控制问题时存在一定的局限性, 特别是在多队列系统中, 单个队列内的车辆需要协调, 而队列之间的协同控制也要求跨队列的动态协调和信息交换. 为降低通信开销, 观测器的引入也成为研究热点, 如文献[13]提出一种分布式扰动观测器与滑模控制相结合的方法, 改进车辆队列在动态环境下的响应性能. 文献[14]提出基于观测器的队列控制方法, 通过分层协同控制在考虑通信延迟情况下实现队列系统的稳定性. 文献[15] 提出一种有限时间扰动观测器, 设计两种滑模控制器用于不同拓扑结构下的队列纵向协同控制. 此外, 为应对动态变化对队列间协同的影响, 部分研究探索动态通信拓扑的优化设计. 如文献[16]提出一种预测性框架, 根据实时数据动态调整队列, 使其在受扰情况下仍能保持队列的一致性和鲁棒性. 文献[17]结合切换拓扑理论和动态优化方法, 有效应对拓扑切换带来的不稳定性和资源分配问题, 确保系统的递推可行性与闭环稳定性. 文献[18]通过构建随机切换模型并结合扰动补偿算法, 提高队列在随机切换条件下的鲁棒性. 文献[19]基于弦稳定性约束和动态权重调整技术建立混合整数线性规划模型, 提升队列在复杂交通场景中的适应能力. 尽管上述研究取得显著进展, 但在单向通信环境下的大规模多队列系统中, 信息传递效率、动态变化适应性以及延迟对全局控制的影响尚未完全解决, 这对控制算法在实际应用中的扩展性和鲁棒性提出了更高的要求.
除此之外, 近年来分布式模型预测控制(Distributed model predictive control, DMPC)因其在复杂动态环境下的良好性能, 逐渐成为研究多队列协同控制的核心方法. 已有研究通过优化通信拓扑、改进控制策略等手段, 部分缓解通信延迟、车辆动力学特性和系统非线性对控制性能的影响. 例如, 文献[20]在单向通信拓扑下, 提出针对异构车辆队列的DMPC算法, 通过惩罚邻近节点的预测误差来设计成本函数, 实现良好的队列协调和鲁棒性. 文献[21]提出一种在通信拓扑切换条件下的DMPC方法, 并通过Lyapunov函数分析确保系统的弦稳定性, 有效应对多种通信故障场景下的控制需求. 文献[22]研究基于车间距离约束的DMPC方案, 旨在保障异构队列在正常和极端情况下的稳定性. 此外, 为应对潜在的网络攻击, 文献[23]提出动态事件触发式DMPC算法, 提高系统在拒绝服务(Denial of service, DoS)攻击下的鲁棒性. 文献[24]进一步提出基于鲁棒DMPC的控制策略, 通过特定Lyapunov函数分析系统在DoS攻击下的稳定性, 从而确保高效的跨队列信息传递. 文献[25]提出一种基于H∞ 性能的安全控制方法, 不仅有效抑制外部干扰, 还能在随机攻击条件下保持队列稳定性. 然而, 这些研究主要集中于小规模或匀质队列系统, 在处理大规模队列信息传递延迟和动态环境响应方面仍存在不足, 这对系统的全局一致性和安全性提出更高的挑战.
综上所述, 在单向通信环境下的大规模多队列系统中, 如何优化信息传递效率、适应动态变化并克服延迟对全局一致性的影响, 是当前研究的关键挑战之一. 为应对上述问题, 本文提出一种基于DMPC的多队列协同控制框架, 通过设计灵活的通信拓扑, 使队列领航车辆实现高效的跨队列信息传递, 即使在传输延迟条件下, 依然能够保证鲁棒的协同控制, 适应动态复杂环境. 所提出的控制算法通过平衡系统响应速度与稳定性, 显著提升了队列的全局同步性与动态适应能力, 并在控制精准度和鲁棒性方面展现出显著优势.

图1 多队列系统场景

图2 队列通信拓扑结构图
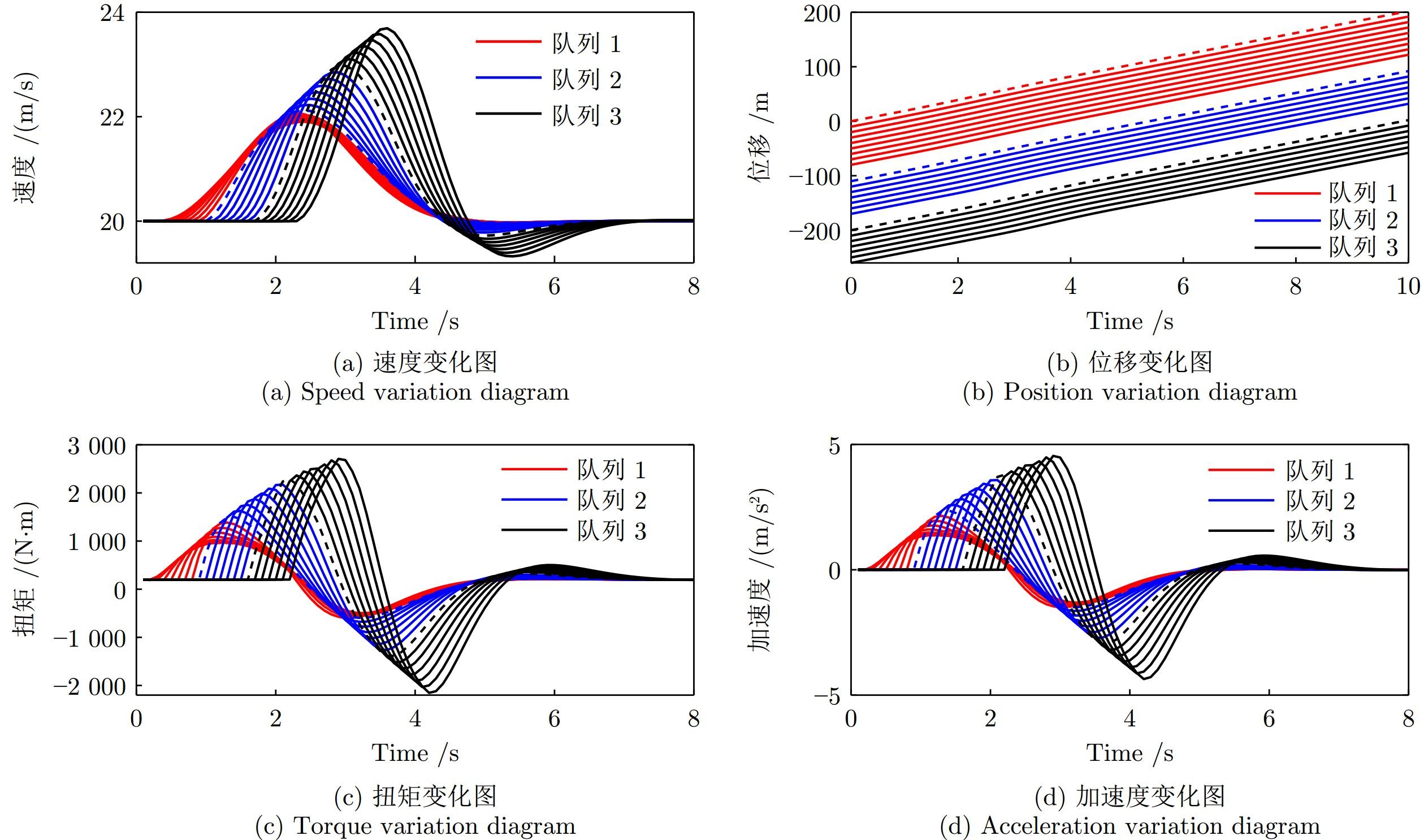
图3 领航车−尾车通信下队列状态变化
本文提出一种基于单向通信结构的分布式模型预测控制(DMPC)框架, 以队列间单向通信拓扑结构为基础, 实现在动态环境下大规模车辆队列的高效协同控制. 首先, 建立一种层次化控制架构, 通过分别为队列领航车辆和跟随车辆制定不同的优化问题, 有效管理队列间和队列内的交互作用. 该方法成功解决了队列内连续车辆之间以及相邻队列之间的复杂耦合约束问题, 在保持队形稳定性的同时确保安全跟随距离. 其次, 为所提出的控制框架建立严格的稳定性保证. 通过Lyapunov稳定性分析, 推导出单队列和多队列系统渐近稳定的充分条件. 重要的是, 弦稳定性分析表明, 提出的控制方法有效防止了扰动在车辆链上的放大, 从而确保车辆在动态条件下的协调运动. 最后, 数值仿真验证了三种不同的通信拓扑结构: 领航车−尾车跟踪策略、领航车−领航车跟踪策略以及领航车与领航车−尾车结合策略. 结果表明, 虽然三种策略均能实现稳定控制, 但领航车与领航车−尾车的结合策略(策略C)在响应速度和系统稳定性之间提供最佳平衡, 有效减少传播延迟并增强了整个系统的同步性. 此外, 通过额外的非理想初始条件和异质车辆参数的仿真, 进一步验证了控制算法的鲁棒性. 控制器在处理初始位移和速度误差方面表现出可靠性能, 并能适应不同的惯性滞后常数和车辆特性.
理论分析和仿真结果共同证实: 所提出的具有适当通信拓扑的DMPC框架能够在保持弦稳定性的同时有效协调多个车辆队列, 即使在具有挑战性的条件下也能表现良好. 为智能交通应用中多队列系统协同控制的实际实现提供了宝贵见解.
未来的研究方向可包括扩展框架以处理更复杂的交通场景, 融入车道变换等横向控制, 以及开发能够应对实际环境中通信延迟和数据包丢失的鲁棒控制策略.
作者简介
王正武
长沙理工大学交通学院教授. 主要研究方向为智能交通系统和车辆控制. E-mail: zhengwu.wang@csust.edu.cn
文强
长沙理工大学交通学院博士研究生. 主要研究方向为网联车辆队列控制与智能交通系统. 本文通信作者. E-mail: wenqing@stu.csust.edu.cn
吴锯强
长沙理工大学交通学院博士研究生. 2024年获得长沙理工大学交通运输专业硕士学位. 主要研究方向为网联车辆队列控制与智能交通系统. E-mail: 24001030026@stu.csust.edu.cn
https://blog.sciencenet.cn/blog-3291369-1508300.html
上一篇:基于个性化联邦强化学习的异构多微网能量调度
下一篇:全息梯度差分卷积的图像分类网络
