博文
复杂网络拓扑识别的一些新进展(Topology identification of complex networks)
||
zhu2018-Chaos-复杂网络部分拓扑识别.pdf [作者:朱帅兵,周进,陆君安]
zhu2019-IEEE.Trans.Cybern-复杂网络拓扑识别的一种新方法.pdf [作者:朱帅兵,周进,陈关荣,陆君安]
zhao2019-TCS2-多层延迟网络的拓扑识别.pdf [作者:赵雪漪,周进,朱帅兵,马村,陆君安]
Topology identification of complex networks
复杂网络拓扑识别的一些新进展
Index Terms: Topology identification, partial topology, complex network, multiplex network, multilayer network.
关键词:拓扑识别,部分拓扑,复杂网络,多重网络,多层网络.
本文主要介绍我们小组(武大数院复杂网络小组)在复杂网络拓扑识别方面的一些新进展,主要包括三个工作:复杂网络的部分拓扑识别(Chaos, 2018)、复杂网络拓扑识别的一种新方法(IEEE Trans. Cybern., 2019)、多层延迟网络的拓扑识别(IEEE Trans. Circuits Syst. II, 2019)。
一、背景
近二十年来,复杂网络科学受到了广泛关注,其中同步(Synchronization)是最热门的主题之一。研究同步往往需要知道网络的拓扑结构(Topology)。有时候无法知道确切的拓扑结构,因此需要识别网络的拓扑结构。
拓扑识别的方法很多,我们主要关注基于同步的拓扑识别方法。此类方法的主要原理是构建一个响应网络(Response Network),以接收驱动网络(Drive Network,即待识别的网络)的节点状态,同时响应网络的拓扑根据接收到的状态演化,当响应网络和驱动网络同步时可反演出驱动网络的拓扑结构。
二、复杂网络的部分拓扑识别(Chaos, 2018)
[1] S. Zhu, J. Zhou, and J. Lu, “Identifying partial topology of complex dynamical networks via a pinning mechanism,” Chaos, vol. 28, no. 4, p. 043108, 2018.
2.1 研究动机. 现有研究中,复杂网络和响应网络具有相同节点数 N,且都是识别网络的整个拓扑结构。这样会有两个问题:(1)响应网络需要 N 个节点和 N*N 个观测器,当 N 很大时不切实际;(2)有时我们只关心部分拓扑结构,比如引文网络中我们可能只关心相关领域的几篇文章的引文。
2.2 主要贡献. 在[1]中,(1)我们给出了复杂网络的部分拓扑识别方法。我们的响应网络只需很少的节点和观测器(由待识别的部分拓扑决定)。例如,当 N=1000 且只需识别与 3 个给定节点相连的边时,响应网络只需 3 个节点,和 1000*3 个观测器,而现有文献中则需 1000 个节点和 1000*1000 个观测器。(2)由于驱动网络和响应网络节点数不同,一般意义上的外同步已不存在,我们让响应网络的节点与驱动网络中对应的节点同步。(3)我们发现了以前文献中证明上的一些不足,并作了相应的完善工作。
2.3 主要结果. 见[1]。
2.4 理论贡献. 为了实现拓扑识别,很重要的一步是证明同步误差 e→0,并由此推出 e'→0。现有文献中,这一步推导没有给出严格证明。为了完善该证明,我们建立了如下的引理。
2.5 待解决的问题. 驱动网络的内同步会阻碍识别,因此现有文献普遍建立在驱动网络状态的线性无关假设上面。然而,这个假设很难验证,目前还没有有效的验证方法,需进一步研究。
三、复杂网络拓扑识别的一种新方法(IEEE Trans. Cybern., 2019)
[2] S. Zhu, J. Zhou, G. Chen, and J. Lu, “A new method for topology identification of complex dynamical networks,” IEEE Trans. Cybern., pp. 1–8, 2019. DOI: 10.1109/TCYB.2019.2894838.
3.1 研究动机. 现有研究普遍建立在驱动网络状态的线性无关假设(Linear Independence Condition, LIC)上面。我们发现了与LIC相关的三个问题:(1)很多文献中,使用LIC时的关键一步缺乏严格的证明;(2)LIC很难验证,目前还没有有效的验证方法;(3)LIC假设不成立时,识别往往失败。LIC不成立多数由驱动网络的内同步引起,因此内同步是阻碍识别的主要因素。基于此,我们的想法是对驱动网络施加一种调解机制,以避免同步(包括广义同步),从而保证拓扑识别成功。
3.2 主要贡献. 在[2]中,我们提出了拓扑识别的一种新方法,无需LIC条件,从而解决了上述三个问题。相比于LIC,本文所需的假设很容易验证。
3.3 主要结果. 见[2]。
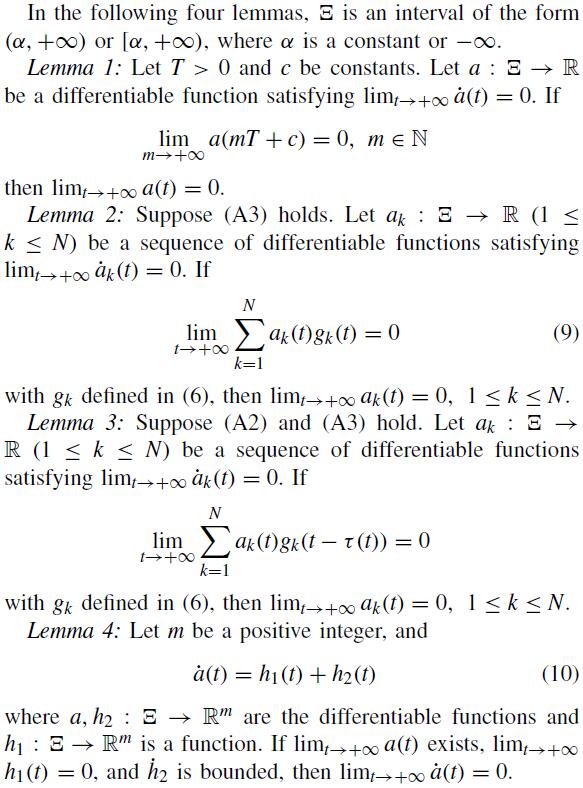
3.4 理论贡献. 我们通过建立如下几个引理,严格地证明了拓扑识别必然成功。这些引理的主要作用是替代现有文献中使用LIC的关键一步,而这一步缺乏严格证明。另外,引理4和文献[1]中引理1具有相似的作用,但是更便于使用。
四、多层延迟网络的拓扑识别(IEEE Trans. Circuits Syst. II, 2019)
[3] X. Zhao, J. Zhou, S. Zhu, C. Ma, and J. Lu, “Topology identification of multiplex delayed networks,” IEEE Trans. Circuits Syst. II, Exp. Briefs, pp. 1–5, 2019. DOI: 10.1109/TCSII.2019.2903287.
4.1 研究动机. 现有的拓扑识别主要集中在单层网络上。然而,现实世界中很多网络是多层的,每一层具有不同的时滞。另外,现有文献中的网络大多通过节点状态耦合,但是有时候网络是通过输出状态耦合的。
4.2 主要贡献. 在[3]中,(1)我们研究了多延迟多层网络的拓扑识别问题,按照不同的延迟构造多层网络模型,也算是多层网络的一个应用。通过添加自适应控制器,可以识别整个多层网络的拓扑结构和网络的未知参数。(2)进一步又讨论了每一层不同内连矩阵和延迟对识别区域的影响。以两层网络为例,发现在其它参数保持不变,两层内连矩阵的差别化增加是有利于识别的;当固定其中一层的延迟,另一层的延迟在一定范围内呈对数型增长,也是有利于识别的。看来参数差别的增加是有利于识别的,这是与我们过去提出的“同步是阻碍识别的”,有一样的机理。
4.3 主要结果. 见[3]。
https://blog.sciencenet.cn/blog-3409638-1170487.html
上一篇:复杂网络的吸引域估计(Estimating the region of attraction)
下一篇:强非线性脉冲网络的有限时间同步(FTS of Networks with Strong Nonlinearity)