博文
运动副的自述
|
运动副的自述
大家好!我是运动副,能够将构件之间直接接触连接起来(图1),并能让相连接的两个构件相互运动。
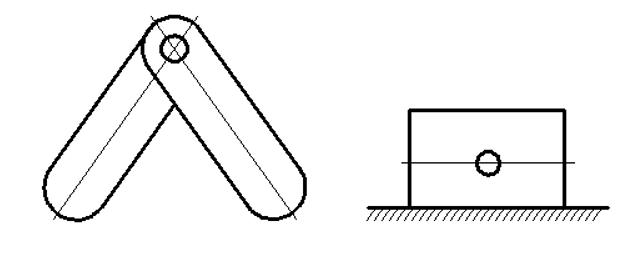
图1运动副
我的形状有很多种,如下面这些是我平面型式的符号表示。

图2平面运动副的符号表示
人们为了便于分析,给我很多分类方式。
(1)根据我提供的约束数目的不同,我可以分为五级:提供1个约束的,称为Ⅰ级运动副(简称Ⅰ级副)。提供两个约束条件的称为Ⅱ级运动副(简称Ⅱ级副);依此类推,还有Ⅲ、Ⅳ、Ⅴ级副。
(2)按照我连接两构件间的相对运动是平面运动还是空间运动,可以把运动副分为平面运动副和空间运动副。
(3)按照我元素的不同,通常把面接触的运动副称为低副,点接触或线接触的运动副称为高副,高副比低副容易磨损。低副常见的型式有转动副和移动副。
(4)按照我接触部分的几何形状不同,可分为圆柱副、平面与平面副、球面副、螺旋副等。
我的常见形式,约束与自由度情况如下。
当我是转动副时,是具有一个独立相对转动的运动副,如图3a所示,构件2沿x轴和y轴两个方向的相对移动受到约束,构件2只能绕垂直xOy平面的z轴转动。其相对自由度数为1,而约束条件数为2。曲柄与机架、连杆与曲柄等连接地方有我的作用。
当我是移动副时,是具有沿一个方向独立相对移动的运动副,如图3b所示,构件2沿y轴的相对移动和绕垂直于xOy平面的z轴的转动受到约束,构件2只能沿x轴方向相对移动。其相对自由度数为1,而约束条件数为2。滑块与轨道、滑块与导杆等是我表现的地方。
当我是高副时,如图3c、d所示,当两构件组成运动副后,构件2沿公法线n-n方向的移动受到的约束,但可以沿接触点切线t-t方向相对移动,还可以同时绕接触点(或线)转动。其相对自由度数为2,约束条件数为1。像车轮与钢轨、凸轮与推杆、齿轮间传动等地方都有我的身影。
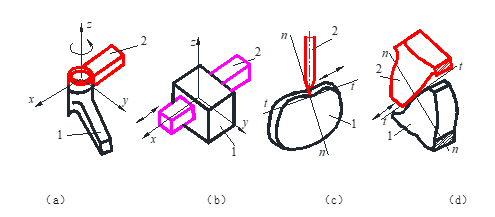
图3 运动副的约束特点
构件间因为我而可以相互运动,也为机构组成奠定了基础。后面就是机构的自述了,请听下回分解。
https://blog.sciencenet.cn/blog-267817-1341180.html
上一篇:机械构件的自述
下一篇:机构的自述