博文
WEVJ 实时定位+三维重建新突破!中科大提出LI-SLAMesh系统,实现同步定位与环境三维建模性能双重提升  精选
精选
||
实时定位与地图构建 (SLAM) 技术是自主移动机器人在复杂、陌生环境中执行高级任务的关键。然而,传统方法常因定位漂移和重建效率低下成为行业痛点。来自中国科学技术大学的王纪凯团队最新发表于World Electric Vehicle Journal (WEVJ) 期刊的论文,提出LI-SLAMesh系统,一举攻克两大难题!不仅定位精度提升22%,还能实时生成毫米级三维网格地图,代码即将开源!
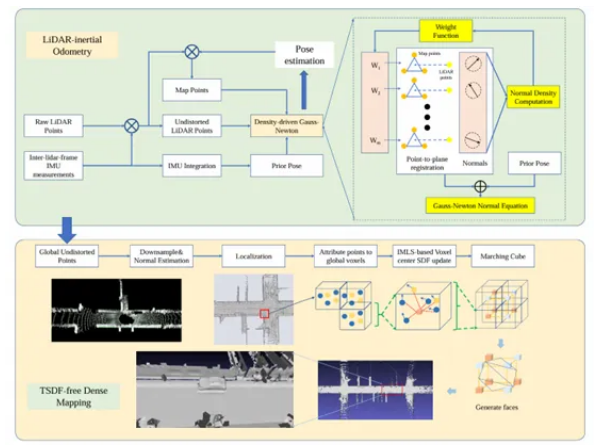
图1. LI-SLAMesh系统框架
研究过程与结果
传统激光定位方法为何“力不从心”?主要因为LiDAR扫描时,地面点占比超60% (如车载场景),导致优化算法过度拟合地面,姿态估计严重偏斜。此外惯性导航 (IMU) 虽能辅助,但累积误差在长距离任务中仍会“雪球式”放大。而整个地图重建时,也有一定困难。另外,在环境三维建模领域,传统方法需维护全域体素地图,128 GB内存仅能处理1 km2场景,且Marching Cube遍历耗时极高。现有方案如SLAMesh虽提速,但跨体素网格断裂、高斯过程计算复杂,难以得到较优的建模质量。
那LI-SLAMesh方法是如何解决这些问题的呢?当激光点云法向量分布不均 (如地面法向量集中为Z轴方向),导致雅可比矩阵病态化,优化结果偏离真实值时,LI-SLAMesh采取了残差密度驱动优化的策略。首先利用动态权重机制,为每个点云残差项赋予权重

其中ℕ为法向量的邻近密度。
该权重决定了法线密度较大的点云残差将具有较小的贡献权重。在这一基础上,再与IMU预积分约束进行融合,并提出迭代权重高斯牛顿法进行非线性优化,避免陷入局部最优。最终效果显著,如在UTBM车载数据集中,长距离轨迹误差降低15%,极端场景 (如快速转弯) 稳定性提升显著。
LI-SLAMesh方法还对地图进行了轻量化处理,利用哈希表与IMLS算法,大大减少了处理地图的代价。采用动态哈希表仅维护被占体素而不是全局体素,内存占用降低了50%。IMLS算法则通过隐式移动最小二乘,用体素内点云法向量加权计算SDF值,并且当新点云到来时,仅需迭代更新体素中心SDF,相比传统方法依赖射线投射,噪声敏感且无法利用法向量信息,精度提升了30% (KITTI实测)。
在实时网格生成方面,LI-SLAMesh方法利用动态立方体构建,仅对活跃体素 (近期被观测且点数>3) 构建邻域立方体,避免无效计算。通过立方体顶点SDF插值生成三角面片,消除SLAMesh的“网格接缝”问题。

图2. 不同方法在MaiCity Seq 01数据上的建图结果
在NCLT数据集上,起点-终点闭合误差仅0.1米;在HKU校园场景中,虽因扫描模式差异精度略降,仍保持0.76米端到端误差 (优于FastLIO2的2.14米)。在重建质量方面,Stevens-VLP16数据集下的测试点云到网格的平均距离0.01米,较SLAMesh提升5倍;Velodyne VLP-16 (低线束雷达) 场景下,墙面连续性仍优于传统方法。在动态场景中,通过“不稳定体素”剔除机制,移除80%以上移动车辆残影,效果良好。
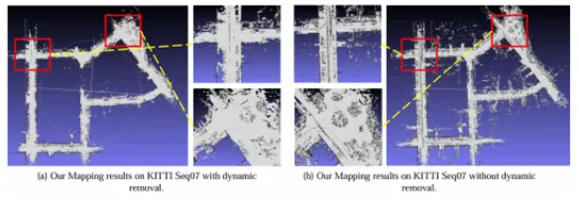
图3. LI-SLAMesh方法在KITTI seq07数据上进行动态物体去除和不进行动态物体去除的建图结果
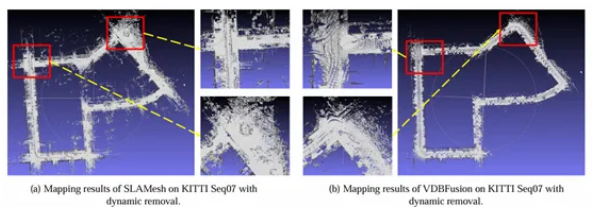
图4. SLAMesh和VDBFusion在KITTI seq07上进行动态物体去除后的建图结果
研究总结
论文提出了一种局部区域的实时稠密建图新框架,对激光雷达-惯性里程计和基于截断符号距离函数 (TSDF) 的建图范式进行了改进。首先,构造了基于点云法线密度驱动的激光-惯性里程计方法。在高斯-牛顿框架下研究了法线密度对位姿优化性能的影响,并根据残差对应的法线密度为其赋予权重。其次,为了减轻在整个建图空间中构建TSDF体素带来的计算负担,论文只在每个被占据的体素中构建一个符号距离函数 (SDF) 顶点,并在必要时依次遍历SDF顶点,利用相邻八个顶点构建一个SDF立方体用于生成三角面元。未来,团队将把回环检测模块整合到系统中,并开发一种更高效、更智能的表面估计器。
原文出自WEVJ 期刊:https://www.mdpi.com/3018646
期刊主页:https://www.mdpi.com/journal/wevj
WEVJ 期刊介绍
主编:Joeri Van Mierlo, Free University of Brussels, Belgium
期刊发表与纯电动汽车、混合动力电动汽车和燃料电池电动汽车相关的研究。
2023 Impact Factor:2.6
2023 CiteScore:4.5
Time to First Decision:16.2 Days
Acceptance to Publication:2.8 Days


https://blog.sciencenet.cn/blog-3516770-1479423.html
上一篇:JMSE:大连海事大学的刘丙新教授和李颖教授共同创建特刊——遥感技术在海洋监测与船舶监管中的应用
下一篇:Brain Sciences 论文选题灵感:脑中的记忆 (上)