博文
[转载]视觉SLAM工具集:面向诊断与评估指标分析的交互式工具
||
视觉SLAM工具集:面向诊断与评估指标分析的交互式工具
刘国庆1,李涛2,吴奇1,项艳1,王超3,王炜4,裴凌1
(1. 上海交通大学 集成电路学院(信息与电子工程学院),上海200240;2. 浙江工业大学 信息工程学院,杭州310023;3. 上海华测导航技术股份有限公司,上海201706;4. 上海市科学技术委员会,上海200003)
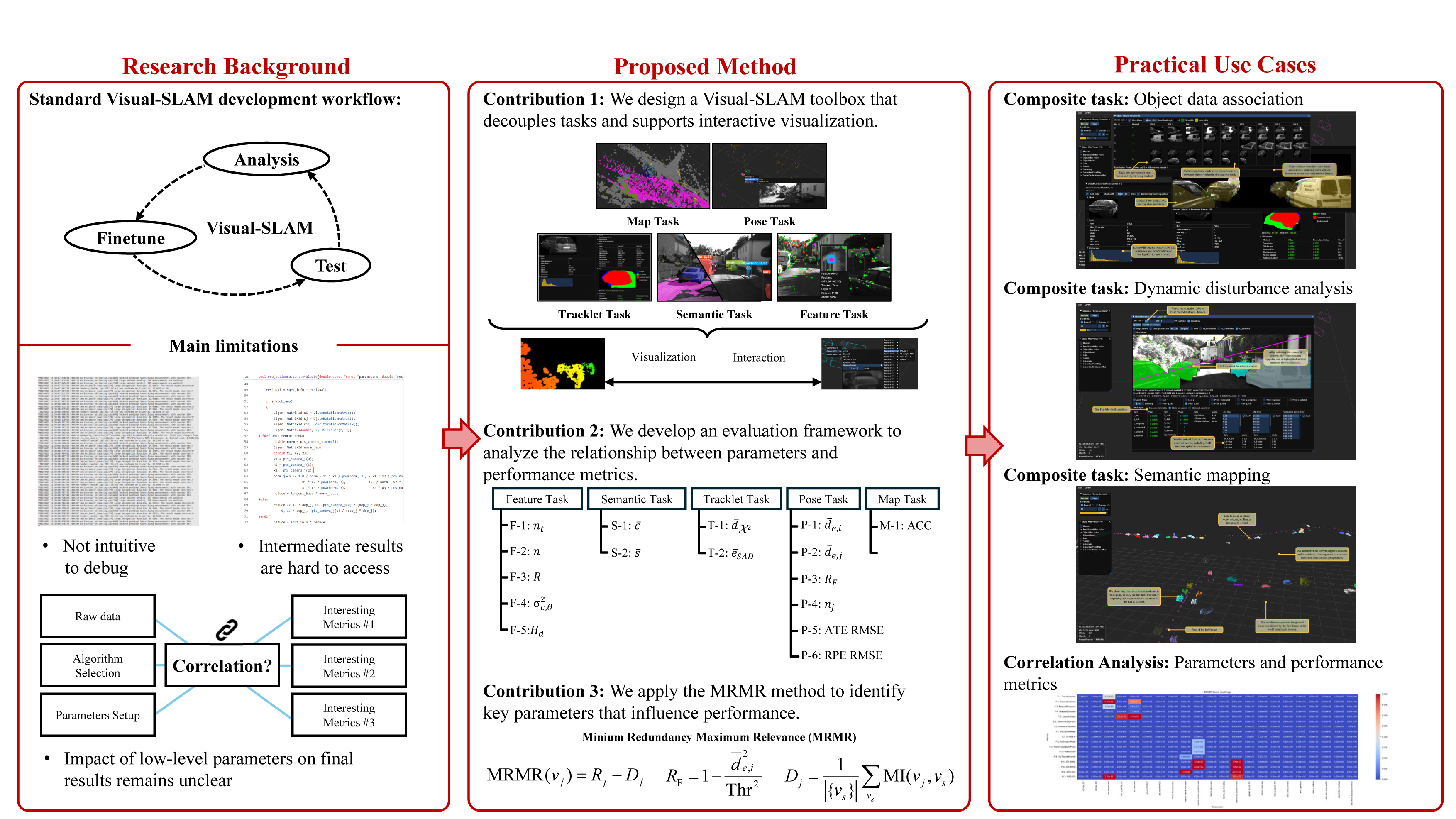
摘要:视觉同步定位与建图(SLAM)系统在机器人和自主导航领域中应用日益广泛,但由于其系统结构复杂,学习与开发仍面临显著挑战。为此,本文提出一种集成化的工具箱与评估体系,用以解决上述问题。该方法将SLAM任务分解为五个核心子任务,使研究人员能够系统地分析中间结果,识别潜在问题,并有效优化参数设置。交互式用户界面进一步提升了算法调试与性能评估的效率。此外,结合最小冗余最大相关性方法的相关性分析揭示了算法参数与评估指标之间的重要关系,为参数调优提供了系统化指导。这些工作有助于加深对SLAM系统的理解,推动算法性能的进一步提升。
关键词:视觉,同步定位与建图,交互式工具集,评估体系,关联性分析
扫二维码浏览全文

Cite this article
Liu, G., Li, T., Wu, Q. et al. Visual-SLAM Toolbox: Interactive Tools for Diagnostics and Metrics Analysis. J. Shanghai Jiaotong Univ. (Sci.) (2025). https://doi.org/10.1007/s12204-025-2880-y
https://blog.sciencenet.cn/blog-45888-1514505.html
上一篇:[转载]AFE-YOLO:一种儿童手腕骨折图像检测算法
下一篇:[转载]SAM2 微调实现皮肤瘢痕分割

扫一扫,分享此博文