博文
[转载]用于多模式抓取的错位平行腔软气动网络执行器
||
用于多模式抓取的错位平行腔软气动网络执行器
张东,刘胜,石梦遥,蔡宇,王大中
(上海工程技术大学 机械与汽车工程学院,上海201620)
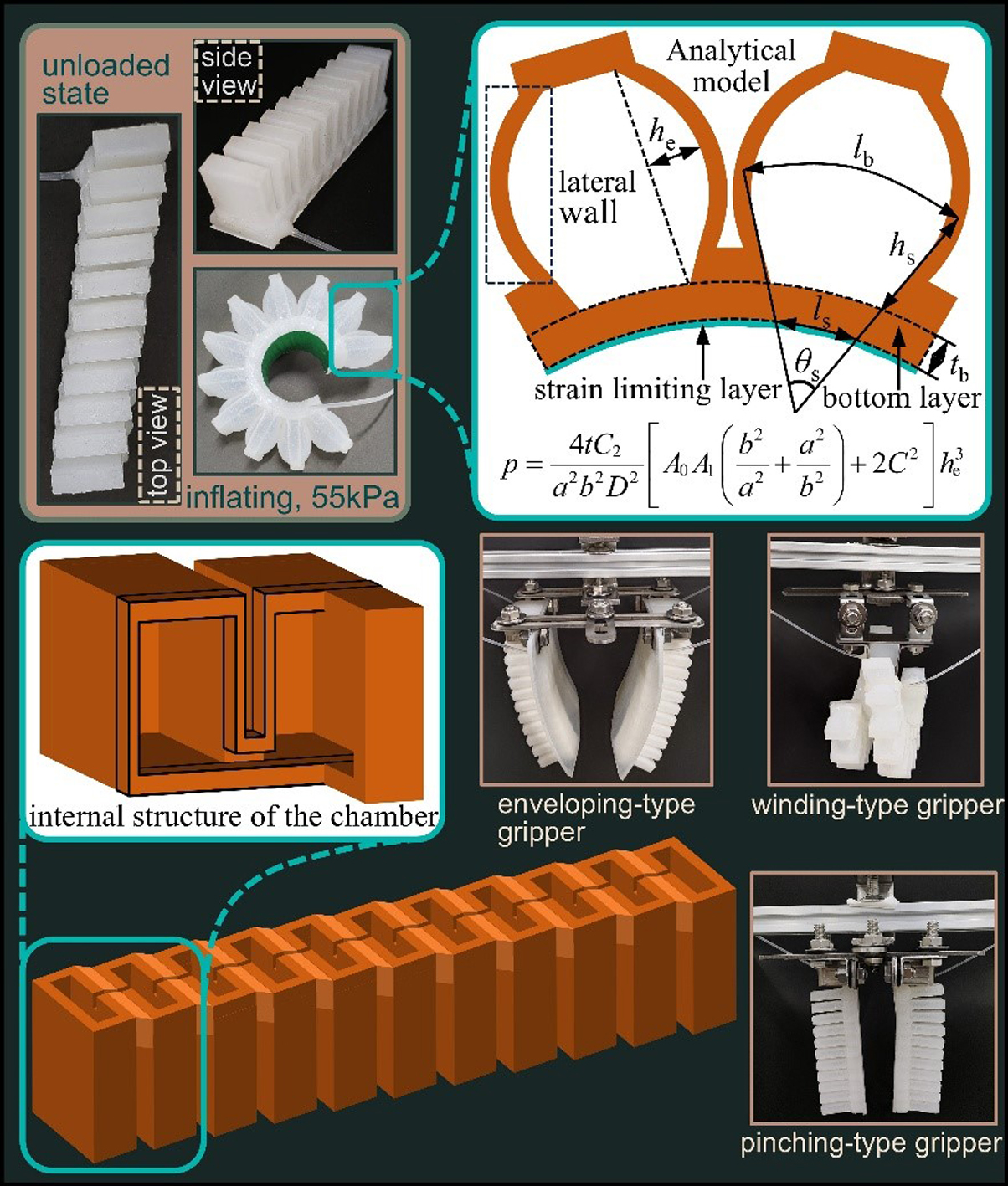
摘要:抓握是生物与环境互动的一种基本方式,也是软机器人技术的一个重要兴趣领域。气动网络执行器在软机器人领域尤其具有发展前景。然而,大多数基于气动网络执行器的软气动抓手只能实现单一的抓取模式,抓取物体的适应性和灵巧性较差。因此,我们提出了一种新型错位平行腔软气动致动器,它主要由嵌入弹性体结构中的软腔组成。然后,利用分段恒定曲率假设并结合 Yeoh 模型,建立了描述拟议致动器弯曲变形和三维轨迹曲线的理论模型。此外,还对弯曲变形进行了有限元模拟,并通过实验进行了验证。最后,设计了三种不同抓取模式的软抓手,即缠绕、包络和捏合,并进行了抓取实验。结果表明:所设计的软抓手对目标物体具有良好的适应性和灵活性,拓展了气动软抓手在拾取物体领域的应用范围。所提出的软执行器为多功能软抓手的设计提供了一种潜在的方法。
关键词:气动网络执行器,软夹持器,多模式抓取,模块化设计,有限元模拟,Yeoh模型
扫二维码浏览全文

Cite this article
Zhang, D., Liu, S., Shi, M. et al. Misaligned Parallel-Chamber Soft Pneumatic Network Actuator for Multi-Mode Gripping. J. Shanghai Jiaotong Univ. (Sci.) (2025). https://doi.org/10.1007/s12204-025-2865-x
https://blog.sciencenet.cn/blog-45888-1509522.html
上一篇:[转载]HGA-SyTSHH: 一种克服金属伪影的牙科CBCT分割方法
下一篇:[转载]基于多分辨率等距采样的碎片图像重组

扫一扫,分享此博文