博文
Machines 美国肯尼索州立大学——软体机器人:新型三自由度软体机器人的计算设计、制造和位置控制
||
文章导读
软体机器人系统因与人体具备固有顺应性匹配的特性而日益受到青睐,使其成为需要与人体直接接触的各类应用场景中的高效解决方案。针对传统软串联机械臂普遍存在的结构刚度低、阻塞力不足等缺陷,美国肯尼索州立大学的Amir Ali Amiri Moghadam团队提出了一款新型三自由度软并联机器人,并详细阐述了该机器人的计算设计、制造工艺及控制方法。这款软并联机器人由三条柔性闭环运动链构成,每条运动链均包含一个软执行器与一个柔性四杆臂。研究团队对机器人的复杂非线性动力学特性进行了数值建模,并借助六自由度电磁位置传感器完成了模型的实验验证。该研究为面向各类复杂应用场景的软并联机器人,提供了计算设计、制造与控制层面的重要参考。
研究方法与结果
软体机器人的发展源自对能够与未知环境安全交互的仿生系统的追求。传统的刚性机器人系统在与人类交互时,严重依赖力传感器和监控系统。而软体机器人凭借其与人体固有的顺应匹配,成为与生命系统安全交互的更优选择。机器人系统的安全顺应性分为两类,其中主动顺应利用传感器反馈的力和力矩数据来控制末端执行器的位置,反馈系统可能更复杂;被动顺应通过柔性结构实现固有安全,但存在精度低和动力学复杂的问题。为此,本研究提出一种新型三自由度软体并联机器人,其小型化设计与软体结构使其在医疗等场景中具备本质安全性。该系统采用柔性铰链 (柔顺关节),相比刚性连接具有低摩擦、免装配工作空间大等优势。
研究首先提出了一种三自由度软体并联机器人的设计。该设计借鉴刚性Delta机器人结构以柔性关节及软体驱动器分别替代传统旋转关节与刚性连杆,从而扩大了工作空间,并实现了一体化设计与制造,显著减少了部件数量与装配时间。机器人的核心单元为单软体连杆柔顺四杆机构,其主动软体连杆采用鳍状梁结构以实现弯曲运动,并通过柔性铰链与被动的一体化柔顺四杆臂连接,实现侧向平移。驱动方式为腱驱动,由舵机通过滑轮与线缆控制。系统由三个呈120°对称分布的SL-CFB臂、顶板、底座平台、三个20kg舵机、线缆及基于Arduino的控制器构成。SL-CFB臂总长248 mm,由85 mm软体连杆与163 mm柔顺四杆臂组成。主要刚性结构件采用PLA材料3D打印制造。
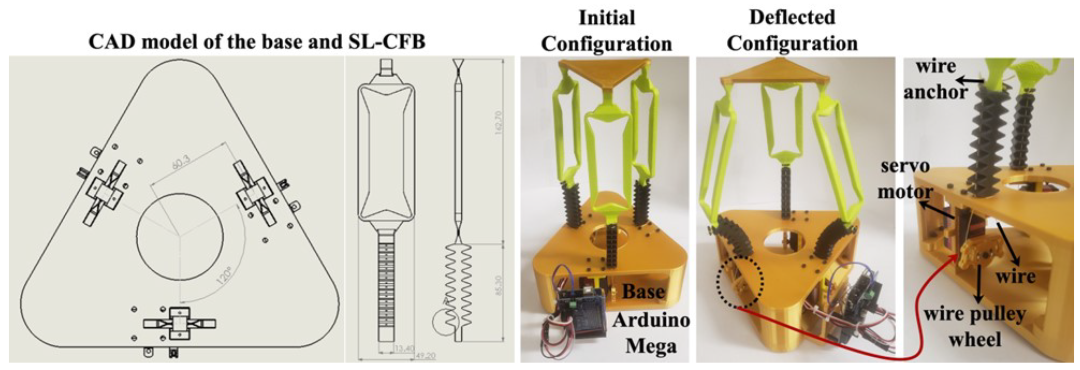
提出的软Delta机器人的CAD模型和样机
本研究采用解析运动学与MATLAB Simscape数值运动学对三自由度软体并联机器人进行了运动学建模与验证。解析模型基于驱动器恒定曲率假设,通过数值求解逆运动学方程,实现了90~160 mm高度范围内的工作空间分析及轨迹预测。Simscape模型则通过模块化实体构建了包含柔性四杆臂与腱驱动系统的简化仿真模型,支持通过关节驱动或轨迹输入控制运动。仿真结果与实验数据 (使用3D打印原型和6自由度位置传感器) 对比验证了模型的有效性,在圆周和螺旋运动中虽存在轻微偏差 (部分归因于传感器安装误差),但整体响应一致,证实了该建模方法在软体机器人轨迹控制和验证中的适用性。
针对软体并联机器人位置控制中面临的雅可比矩阵不确定性与非线性特性挑战,研究采用数据驱动的替代方案,重点评估了k最近邻 (KNN) 回归与神经网络两种方法在逆运动学求解中的性能。实验表明,在开环控制中,两种数据驱动方法 (均方根误差分别为0.16和0.19) 显著优于基于简化运动学模型的传统方法 (误差1.46)。进一步引入闭环PID控制后,两者的控制精度均得到进一步提升,均方根误差均降至0.08。结果验证了数据驱动策略在有效克服模型不确定性、实现精确位置控制方面的潜力与实用性。
研究总结
本文提出并实现了一种新型三自由度软体并联机器人,其结构模拟刚性Delta机器人构型,采用TPU与NinjaFlex材料通过3D打印一体化成形,并由三个腱驱动软体驱动器实现运动。基于恒定曲率假设建立了该机器人的运动学模型,并利用MATLAB Simscape进行了数值仿真验证,结果表明机器人在其工作空间内能够有效实现预设的三维轨迹运动。通过对比物理样机实验数据与仿真结果,验证了整体结构设计与运动学模型的有效性。未来的研究工作将聚焦于软体机器人的鲁棒位置控制以及开发更优的六自由度软体机器人。
阅读英文原文:
https://www.mdpi.com/2075-1702/12/8/539
Machines 期刊介绍
主编:Antonio J. Marques Cardoso, University of Beira Interior, Portugal
主要发表机械设备故障诊断和预测、机械设计、机电一体化、机器人、叶轮机械、控制及自动化、电机和驱动器、先进制造等领域的最新学术成果。
2024 Impact Factor:2.5
2024 CiteScore:4.7
Time to First Decision:17.6 Days
Acceptance to Publication:2.7 Days
期刊主页:https://www.mdpi.com/journal/machine
https://blog.sciencenet.cn/blog-3516770-1532453.html
上一篇:Processes 徐鹏教授等主持特刊:钻井、完井和生产过程中井筒-油藏系统中CO₂的多相流动和反应过程
下一篇:Machines 韩国弘益大学:面向无人机的实时动态相对定位增强技术
