博文
乔红院士团队 | 类脑智能机器人:理论分析与系统应用
||
微信:点击阅读微信原文
期刊:Machine Intelligence Research
传统的关节连杆型机器人由于在单一任务中的高精度作业,在生产线上得到了广泛使用。制造业和服务业的快速发展,对机器人的综合性能提出了越来越高的要求。为了实现类人的运动控制和操纵,人们对多种仿生机器人进行了研究。为了让机器人更好地模仿人类和动物,研究团队提出了一条从内部神经机制到外部躯体结构的研究思路。在这种思路的指导下,搭建了一套包含视觉认知、决策、运动控制和肌肉骨骼结构的类脑智能机器人系统。
中科院自动化所乔红院士团队对类脑视觉认知、决策、运动控制和肌肉骨骼系统的前沿研究进行了综述,构建了两套软件系统和一套对应的硬件系统,旨在验证并应用于下一代类脑肌肉骨骼机器人。文章发表于Machine Intelligence Research (MIR) 2023年第一期中,全文开放获取!

全文导读
机器人被誉为"制造业皇冠上的明珠",已经成为衡量一个国家科技综合实力的重要指标。自1962年第一台工业机器人Unimate上线以来,人们将大量的机器人系统投入到了工业生产线上,代替工人完成重复性、高风险、高负荷的任务,从而不断为制造业企业创造巨大的生产效益。随着机械工程、控制和人工智能技术的不断进步,国防、医疗、先进制造业等众多应用领域都对机器人应用提出了迫切的需求。然而,现有机器人系统的性能仍然受到传感器精度、系统重复精度和辅助机械性能的限制。提高机器人的性能需要机械工程、材料科学、控制理论、智能芯片、信息科学等多学科的协同发展,而由于其所需投资较大,开发周期较长,机器人的广泛应用也大大受限。
相比之下,人类在感官反馈绝对精度低、行为控制和分散计算能力有限的情况下,可以实现比每个身体单元独立完成能力更加出色的整体性能。这主要得益于人类能够整合多个脑区的信息,并且能充分利用身体结构的优势。因此,通过模仿人类的生理结构、行为特征、智能原理和控制机制,开展类脑智能机器人研究,对开发新一代机器人具有重要意义。
长期以来,人们一直把人类作为改进机器人的参考标准。目前,根据研究出发点的不同,类人机器人的研究工作主要包括两种思路。第一种思路是让机器人模仿人类的功能。基于对人类行为的观察和分析,这种研究思路旨在赋予机器人完成人类工作的能力。例如,目前使用最为广泛的关节型机器人是由刚性连接、齿轮箱、关节减速器和辅助工具组成。虽然关节机器人在外观和执行原理上与人类有很大不同,但在复杂传感器和专用控制程序的帮助下,它们可以代替人类完成特定的操作任务。

图一 软件平台系统框架图
另一个典型的例子是具有与人类外观和功能类似的仿人机器人,旨在从外到内模仿人类机制。其代表性的研究成果包括本田汽车公司的ASIMO机器人(1997C),北京理工大学的BHR机器人(2000C),意大利理工学院的iCub机器人(2008C),以及波士顿动力公司的Atlas机器人(2016C)。这些机器人通常具有双足运动能力,引入人工智能算法后,也具有初始的自学能力和对复杂任务的适应能力。
研究人员利用高度冗余的执行器,让仿人机器人具备能比拟人类的灵活性;然而,这同时也带来了控制器设计方面的挑战。人们提出了许多数学算法来控制具有高冗余执行器的仿人机器人,例如为实现稳定双足运动所提出的零力矩点、捕获点和中枢模式发生器算法,为实现多样化操作所研发的无模型强化学习、基于示教的模仿学习算法等。虽然这些方法仍处于研究的早期阶段,但这些方法成效显著,有望拓宽仿人机器人的应用范围。
第二种思路是以模仿人类的核心和基本机制为方向,以此形成了对类脑智能机器人的研究。类脑智能机器人是参照人类视觉认知、决策、运动控制和肌肉骨骼系统的神经机制和结构特征,从内在机制到外部结构对人类进行模拟。
类脑智能机器人的研究通过整合脑科学、人工智能和机器人学等多个学科,旨在建立具有高计算效率和通用智能的类脑信息处理算法,研发具有高度灵活性和鲁棒性的肌肉骨骼系统,为下一代机器人的发展奠定基础。在过去的几年里,出于探索人类的本质和治疗精神疾病的迫切需要,美国、欧盟、日本、韩国、加拿大、澳大利亚和中国等多个国家都提出了脑计划,以促进脑科学和类脑智能的研究。
作为类脑智能不可缺少的一部分,类脑智能机器人是一套软硬件结合的综合系统,对验证研究成果具有重要意义。许多研究团队在类脑算法、脑神经形态芯片和肌肉骨骼机器人系统方面进行了初步研究,并取得了许多阶段性成果。可穿戴外骨骼系统作为肌肉骨骼系统的典型应用,是近年来的一个热点。
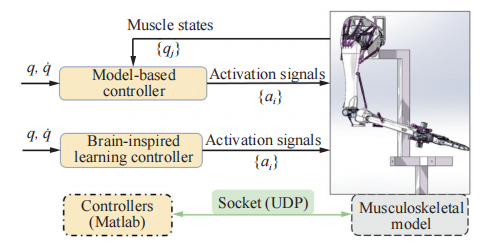
图二 仿真系统控制框图

图三 硬件平台的结构设计和肌肉分布图
研究者们利用基于区域的控制和交互式框架、人在环路控制、势垒函数设计等有前景的技术和框架,来改善可穿戴外骨骼系统在辅助行走和负重工作中的性能。这些研究工作对于肌肉骨骼的应用具有重要意义,代表着使用仿生可穿戴外骨骼系统进行人机交互的最前沿研究。由于引入了人类的内部运作机制,类脑智能机器人有望实现与人类的共鸣,并实现与人类伙伴的深度合作。
与以往类脑机器人的相关综述相比,本研究介绍了类脑机器人研究链上的前沿工作,包括启发性神经机制、类脑算法设计、软件平台搭建和硬件系统开发。本文特别介绍了软件和硬件系统集成的最新进展。
本文的其余部分组织如下。第二部分介绍了视觉、决策、控制和身体结构的核心神经机制以及相应的类脑算法。第三部分介绍了软件和硬件系统集成。类脑机器人的仿真平台整合了视觉、决策和运动控制方面的类脑算法,为不同领域的研究人员提供了高效的工具。硬件平台的设计模仿了人类的肌肉骨骼系统,研发了一套物理系统来验证类脑算法的性能。第四部分对研究进行了总结和归纳。
本文作者

关于Machine Intelligence Research
Machine Intelligence Research(简称MIR,原刊名International Journal of Automation and Computing)由中国科学院自动化研究所主办,于2022年正式出版。MIR立足国内、面向全球,着眼于服务国家战略需求,刊发机器智能领域最新原创研究性论文、综述、评论等,全面报道国际机器智能领域的基础理论和前沿创新研究成果,促进国际学术交流与学科发展,服务国家人工智能科技进步。期刊入选"中国科技期刊卓越行动计划",已被ESCI、EI、Scopus、中国科技核心期刊、CSCD等数据库收录。
https://blog.sciencenet.cn/blog-3432244-1376306.html
上一篇:新刊推荐|Low-carbon Materials and Green Construction创刊号6篇论文正式上线
下一篇:Springer即将截止的特刊征稿二月辑|寻找更匹配您的投稿方向
