博文
有向图上不确定性参数系统的有限时间辨识与自适应一致性控制
|
引用本文
岳冬冬, 史建涛, 王钢, 曹进德. 有向图上不确定性参数系统的有限时间辨识与自适应一致性控制. 自动化学报, 2025, 51(2): 391−403 doi: 10.16383/j.aas.c240382
Yue Dong-Dong, Shi Jian-Tao, Wang Gang, Cao Jin-De. Finite-time identification and adaptive consensus control of uncertain parametric systems over directed graphs. Acta Automatica Sinica, 2025, 51(2): 391−403 doi: 10.16383/j.aas.c240382
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c240382
关键词
多智能体系统,自适应控制,参数辨识,有向图,自适应一致性
摘要
针对有向图上一类不确定性多智能体系统, 研究一体化参数辨识与一致性控制策略. 在现有模型参考自适应一致性(Model reference adaptive consensus, MRACon)框架基础上, 结合动态回归因子扩张与融合(Dynamic regressor extension and mixing, DREM)技术, 提出两类改进的MRACon控制协议, 即固定耦合DREM-MRACon和自适应耦合DREM-MRACon. 其中, 自适应耦合DREM-MRACon在有向支撑树结构上具有时变的耦合增益. 与MRACon相比, 此两类改进算法均能保证系统未知参数的有限时间辨识. 此外, 固定耦合DREM-MRACon保证了多智能体系统的指数时间一致性, 而自适应耦合DREM-MRACon则克服了对于全局网络拓扑特征信息的依赖性. 最后, 通过数值仿真验证了理论成果的有效性.
文章导读
多智能体系统的一个显著优势在于利用群体智能求解超出个体能力的复杂问题, 或执行超越个体层面的复杂任务, 其中, 一致性控制扮演着至关重要的角色. 如不满足信号激励条件的系统辨识器个体, 可通过引入一致性控制组成辨识器网络进行协同系统辨识[1−2]. 再如不满足可观测性条件的传感器个体, 可通过引入一致性控制组成传感器网络实现协同状态估计[3−4]. 此外, 多智能体系统的一致性在无人系统集群编队[5]、多轴运动系统同步[6]、信息物理系统[7−8]、群体优化与博弈[9]等复杂任务场景中都发挥着基石般的作用.
实际的被控对象往往具有不确定性, 解决此问题的有利工具之一是自适应控制. 近年来, 针对非确定性多智能体系统的协同自适应控制问题受到广泛的关注. 文献[10−13]利用神经网络和模糊逻辑系统的非线性映射逼近能力, 研究了带有非线性未建模动态的多智能体系统的自适应一致性控制. 文献[14−15]考虑了多智能体系统存在未知执行器故障的情形, 通过构造自适应补偿项实现容错一致性. 文献[16−17]研究了不依赖于全局网络拓扑特征信息的完全分布式控制方法, 通过引入节点间耦合增益的自调节机制, 避免了全局参数的使用. 该思想于近年来已推广至分布式优化与博弈问题中[18−20]. 文献[21−23]将模型参考自适应控制 (Model reference adaptive control, MRAC)应用于领导跟随多智能体系统, 以克服智能体固有动力学未知时控制器设计的难题. 应当指出, 在多智能体系统的许多应用场景中, 并不存在“领导者”, 如协作装配机械臂等. 由于缺乏明确的全局参考信号, 无领导者系统的协同控制问题通常更具有挑战性[24].
早期有关无领导者多智能体系统的研究普遍假设系统的通讯拓扑为无向图 (即仅包含双向通讯链路), 如文献[1, 10, 16]等. 然而, 信息流动的有向性广泛存在于包含社交网络、车联网、万维网在内的各类实际网络系统中. 因此, 针对有向图上的无领导者一致性控制研究更具有普适性. 当假设智能体的动力学模型为确定性的线性系统时, 文献[25−29]研究了无领导者系统的完全分布式控制或优化问题. 当智能体存在未建模动态时, 文献[30]将模型参考自适应控制应用于有向图上的无领导者系统, 提出模型参考自适应一致性(Model reference adaptive consensus, MRACon)控制. 通过为每个智能体构造虚拟的参考模型, MRACon将无领导者一致性控制问题转化为本地虚拟参考模型跟踪与参考模型一致性控制两个子问题. 然而, 为了处理两个子问题之间的耦合关系, MRACon协议中采用依赖于全局网络拓扑特征信息的静态耦合增益参数. 另外, 文献[31]主张将多智能体系统的协同问题进行彻底分解, 摒弃传统方法采用的智能体直接交互的方式, 实行分级控制: 将协同控制器划分为虚拟参考信号层和本地跟踪层, 且智能体间的交互只在虚拟参考信号层进行. 该分级控制具有更好的可扩展性与实用性, 也为进一步对MRACon进行优化提供了思路.
回溯自适应控制的研究历史, 参数估计自适应律的设计方法通常有两种: 一种是以自校正控制为代表的基于参数估计的方法; 另一种是以MRAC为代表的基于稳定性理论的方法[32]. 在经典MRAC闭环系统中, 即使参数估计不准确, 目标跟踪误差仍可实现渐近收敛. 另外, 参数的精确辨识能够有效提升系统的鲁棒性, 但却依赖于回归信号的持续激励条件[33]. 值得注意的是, 持续激励条件要求信号在任意时刻作为起始点的一个周期内均具有足够的信息裕度, 因而较为严苛. 随着研究深入, 有学者尝试在模型参考控制框架下引入基于参数估计的自适应律设计. 此类交叉设计既保留了模型参考控制框架的实用性, 又克服了基于稳定性理论的设计方法的部分局限性. 2017年前后, 知名学者Romeo Ortega及其团队提出一类动态回归因子扩张与融合 (Dynamic regressor extension and mixing, DREM)参数估计方法[34−36]. DREM利用滤波与伴随矩阵算子构造出基于分量的参数估计自适应律, 在严格弱于持续激励的条件下, 给出参数收敛的充要条件. 进一步, 文献[37]表明基于DREM的MRAC能够克服传统方法对于系统高增益矩阵的先验假设. 近年来, DREM理论迅速发展, 并在安全关键系统[38]、电力系统[39]等领域崭露头角. 然而, 考虑将DREM应用于多智能体系统, 目前相关工作较为少见. 一个较早的尝试是文献[40], 作者研究了基于DREM的离散型多智能体的协同参数辨识问题, 结果表明DREM具有收敛速度快、所需激励条件弱等优势. 更一般地, 针对连续型非确定性多智能体系统的协同控制问题, 基于DREM的参数辨识与控制方案未见报道, 值得深入研究.
本文考虑有向图上的一类带有参数不确定性的无领导者多智能体系统, 研究基于DREM的一体化参数辨识与一致性控制, 提出固定耦合DREM-MRACon与自适应耦合DREM-MRACon两类控制协议. 所提协议的优势可概括如下:
1) 所提协议保证了对系统未知参数的有限时间精确辨识, 而文献[30]未给出参数收敛的理论保证.
2) 固定耦合DREM-MRACon保证了一致性误差的指数收敛性, 而文献[30]仅保证渐近收敛性. 实验表明, 所提两类协议均大幅度提升了一致性误差的收敛速率.
3) 与文献[30]和固定耦合DREM-MRACon不同, 自适应耦合DREM-MRACon无需选取全局耦合增益参数, 即不依赖于全局网络拓扑的特征信息.
4) 与文献[25−29]不同, 本文考虑的智能体动力学模型带有不确定性, 适用范围更加广泛.
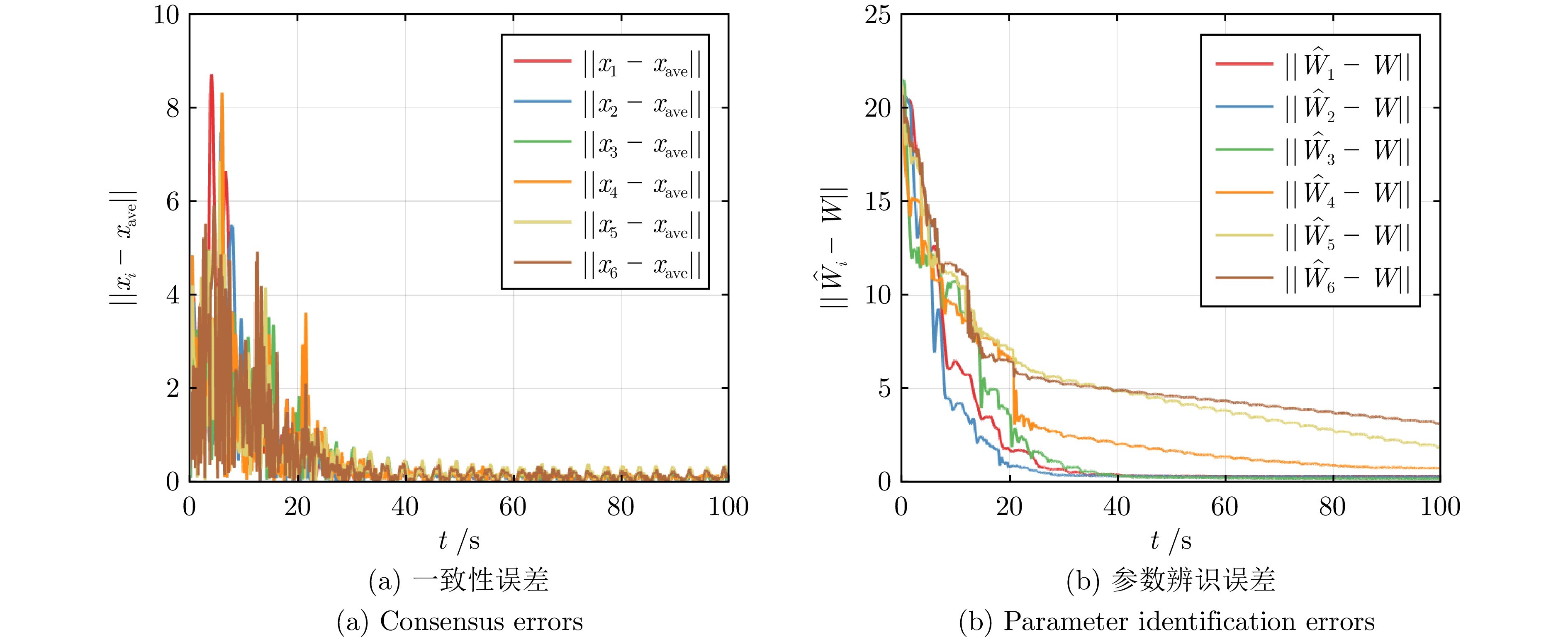
图 2 基于文献[30]提出的MRACon (即式(4))求解得到的一致性误差和参数辨识误差
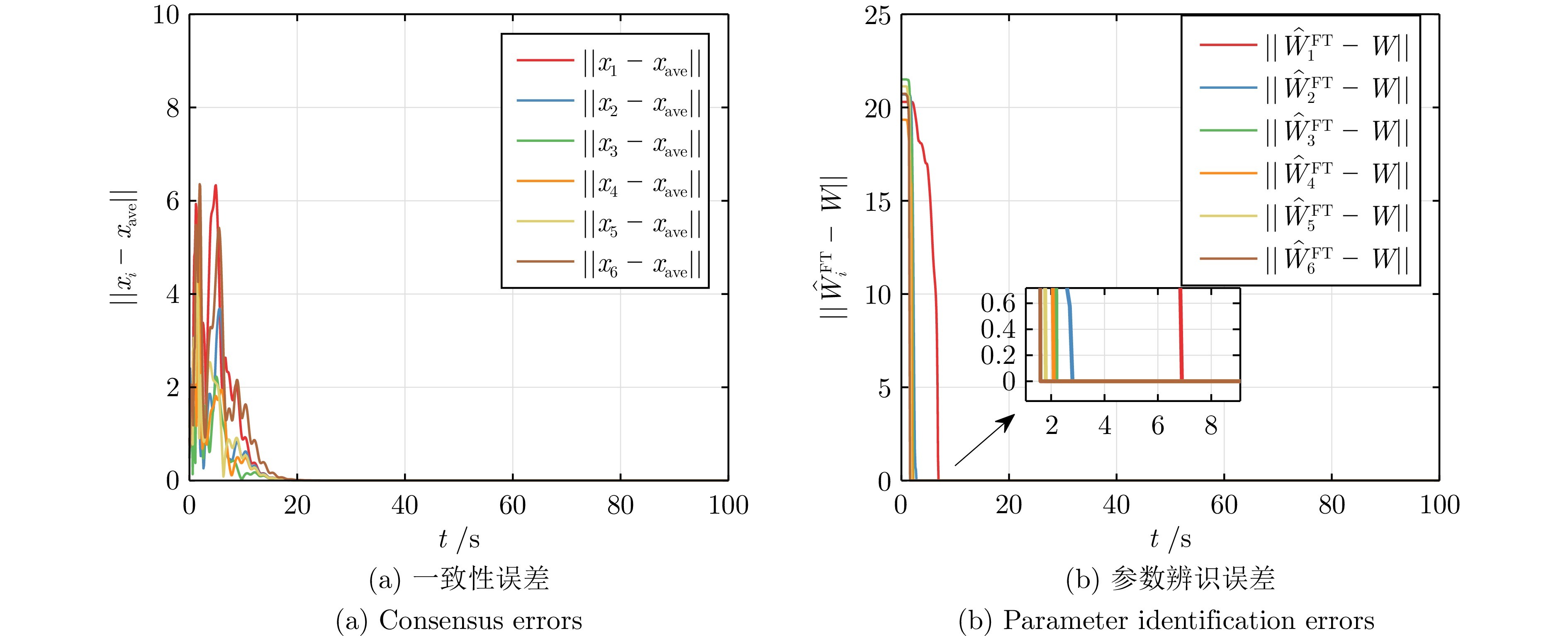
图 3 基于本文提出的固定耦合DREM-MRACon求解得到的一致性误差和参数辨识误差
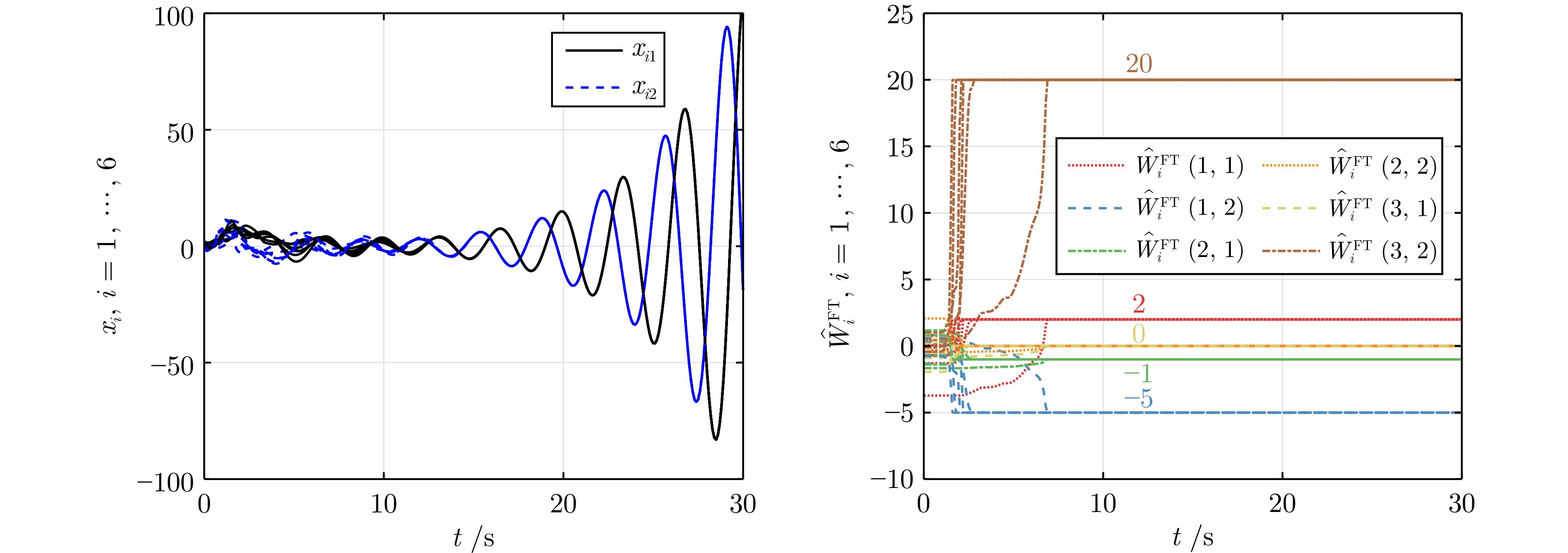
图 4 多智能体系统的状态轨迹与参数辨识轨迹
本文研究了基于动态回归因子扩张与融合(DREM)的非确定性多智能体系统的参数辨识与协同控制问题. 针对有向图上的无领导者多智能体系统, 提出固定耦合DREM-MRACon和自适应耦合DREM-MRACon两类协议. 其中, MRACon为现有文献中提出的模型参考自适应一致性协议. 与MRACon相比, 所提协议保证了对系统未知参数的有限时间辨识, 从而进一步提升了多智能体一致性的收敛速率与暂态性能. 未来工作将考虑当智能体动力学矩阵未知时基于数据驱动的一体化辨识与控制方案. 此外, 注意到智能体在参数辨识阶段不存在信息交互, 未来工作将进一步研究带有通讯机制的分布式DREM的可行性.
作者简介
岳冬冬
南京工业大学电气工程与控制科学学院副教授. 2021年获得东南大学控制科学与工程专业博士学位. 东南大学博士后. 主要研究方向为网络系统的分布式自适应辨识, 控制与优化. E-mail: yued@njtech.edu.cn
史建涛
南京工业大学电气工程与控制科学学院教授. 2016年获得清华大学控制科学与工程专业博士学位. 主要研究方向为最优与学习控制, 分布式协同控制, 故障检测与容错控制. 本文通信作者. E-mail: shjt@njtech.edu.cn
王钢
北京理工大学自主智能无人系统全国重点实验室教授. 2018年获得北京理工大学控制科学与工程专业博士学位, 同年获得明尼苏达大学电气与计算机工程专业博士学位. 明尼苏达大学博士后. 主要研究方向为信号处理, 强化学习, 信息物理系统, 多智能体系统. E-mail: gangwang@bit.edu.cn
曹进德
东南大学首席教授. 1998年获得四川大学应用数学专业博士学位. 香港中文大学博士后. IEEE会士, 俄罗斯科学院院士, 欧洲科学院院士. 主要研究方向为复杂网络与复杂系统, 神经动力学与优化. E-mail: jdcao@seu.edu.cn
https://blog.sciencenet.cn/blog-3291369-1479669.html
上一篇:基于颜色转移和自适应增益控制的混合水下图像增强
下一篇:基于视觉的人体动作质量评价研究综述