博文
同波束VLBI技术成功监视嫦娥三号月球车在月面的运动
||
利用同波束VLBI技术解算的差分相时延在嫦娥三号两器分离和两器互拍过程中成功监视了月球车的运动, 灵敏度在50–100 mm之间, 后续可以对月球车进行月面相对定位.
这项名为《基于同波束VLBI差分相时延的“玉兔”月球车动作监视分析》研究论文发表于《中国科学: 物理学力学天文学》2014年第8期. 由中国科学院上海天文台刘庆会研究员和郑鑫博士生担任通信作者撰写.
嫦娥三号于2013年12月14日成功月面软着陆. 着陆一段时间后, 开始两器分离和两器互拍过程. 整个过程月球车和着陆器都会向地面连续发射信号. 利用同波束VLBI技术, 提取两个探测器信号中间频点的相位, 解算含整周模糊度的差分相时延. 由于着陆器在月面保持不动, 差分相时延的变化主要反映了月球车的动作及地球和月球的相对运动.
本文创新之处在于利用超高灵敏度的差分相时延, 观察其变化, 分析月球车在月面的运动情况. 图1和图2给出了差分相时延变化情况. 月球车月面行走时, 差分相时延相应的快速变大或变小; 原地转弯时, 差分相时延呈弧线型变化; 平移过程类似于行走; 高程变化时, 差分相时延晃动变化; 月球车晃动时, 差分相时延来回晃动. 月球车在月面每一次运动, 其都会相应的发生变化. 不同基线对同一个动作的反应不同. 两个探测器距离不同, 也会导致差分相时延变化趋势不同.

图1 北京-昆明, 北京-乌鲁木齐和昆明-乌鲁木齐三条基线12月14号观测数据的差分相时延(DPD)
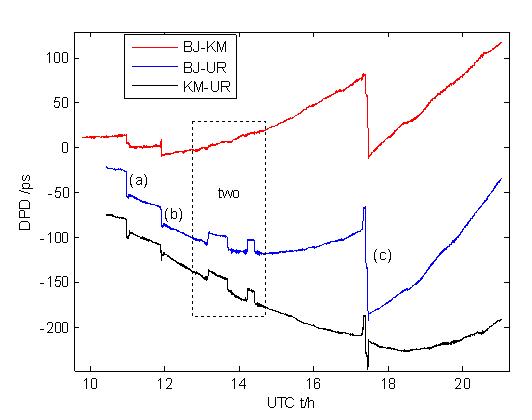
图2 北京-昆明, 北京-乌鲁木齐和昆明-乌鲁木齐三条基线12月15号观测数据的差分相时延
该研究成果在我国探月三期月球采样返回任务、火星探测、金星探测等双目标或多目标深空探测任务中也将发挥重要作用.
研究得到了国家自然科学基金(11273049), 国家高技术研究发展计划项目(2012AA121203); 上海市导航与定位重点实验室(3912DZ227330001); 中国科学院行星科学重点实验室(2013DP173302)基金资助.
来源论文:
郑鑫, 刘庆会, 吴亚军, 等. 基于同波束VLBI差分相时延的“玉兔”月球车动作监视分析. 中国科学: 物理学力学天文学, 2014, 44: 872-878
Zheng X, Liu Q H, Wu Y J, et al. Motion monitoring and analysis of Chang’E-3 rover based on same-beam VLBI differential phase delay ( in Chinese). Sci Sin-Phys Mech Astron, 2014, 44: 872-878, doi: 10.1360/SSPMA2014-00032
论文链接: http://phys.scichina.com:8083/sciG/CN/abstract/abstract514976.shtml

https://blog.sciencenet.cn/blog-306503-815227.html
上一篇:非稳定原子核的集团结构自由度
下一篇:第三代北斗卫星导航系统的一种设计方案