博文
[转载]采用渐进式学习的低空飞行器轨迹预测
||
采用渐进式学习的低空飞行器轨迹预测
章豪1,2,周宇智3,刘冰2,刘国梁2,蔡云泽1,4
(1. 上海交通大学 自动化与感知学院,上海 200240;2. 中国航空无线电电子研究所,上海 200241;3. 复旦大学 未来信息创新学院,上海 200433;4. 系统控制与信息处理教育部重点实验室,上海 200240)
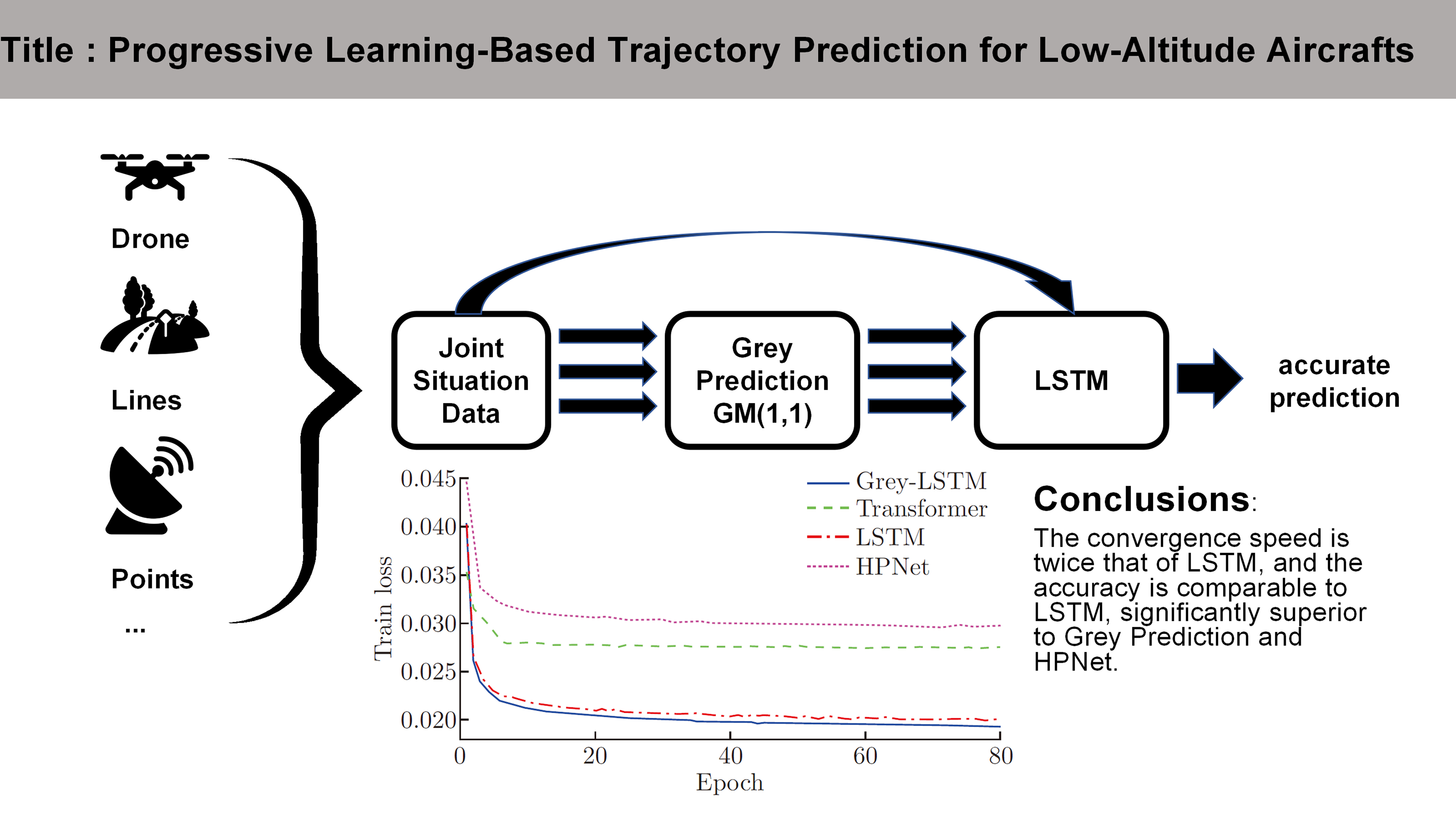
摘要:低空经济背景下,低空飞行器轨迹预测至关重要。现有算法存在关键局限,主因是目标运动不确定性强、算法适应性差,难以满足复杂场景精度需求。针对低空场景下无人机轨迹预测的复杂与多样,本文构建无人机任务场景模型,以及设计基于联合态势数据的渐进式学习算法。该算法融合长短期记忆网络与灰色预测,通过深度感知与态势分析,实现无人机轨迹实时准确解析。
关键词:轨迹预测,渐进式学习,联合态势,低空经济管理
扫二维码浏览全文

Cite this article
Zhang, H., Zhou, Y., Liu, B. et al. Progressive Learning-Based Trajectory Prediction for Low-Altitude Aircrafts. J. Shanghai Jiaotong Univ. (Sci.) (2025). https://doi.org/10.1007/s12204-025-2883-8
https://blog.sciencenet.cn/blog-45888-1514931.html
上一篇:[转载]面向无人机自主降落的多阶段视觉引导
下一篇:[转载]融合变道意图识别的行车风险场建模

扫一扫,分享此博文