博文
Robotics:“农业和森林机器人技术的进展”特刊精选文章 | MDPI 编辑荐读
||
Robotics 特刊“Advances in Agriculture and Forest Robotics (农业和森林机器人技术的进展)”旨在介绍与机器人相关的理论和实践问题,以及农业和林业机器人领域的新发现、新想法和创新改进。本期编辑荐读为您推荐发表在该特刊的5篇优秀文章,希望能为相关领域学者提供新的思路和参考,欢迎阅读。
01
Advances in Agriculture Robotics: A State-of-the-Art Review and Challenges Ahead
农业机器人技术进展:最新综述与未来挑战
Luiz F. P. Oliveira et al.

用于产量估计和表型的机器人。
文章亮点:
(1) 本文综述了农业机器人系统在种植前土地准备、播种、种植、植物处理、收获、产量估计和表型方面的主要现有应用。
(2) 本文评估了所有相似特征,强调了未来需要通过研究工作提高智能农业最先进水平的四个主要领域:运动系统、传感器、计算机视觉算法和通信技术。
(3) 揭示了研究趋势、常见陷阱和阻碍商业发展的特征,并指出正在投资于这些技术的未来研发的国家。
原文出自 Robotics 期刊
Oliveira, L.F.P.; Moreira, A.P.; Silva, M.F. Advances in Agriculture Robotics: A State-of-the-Art Review and Challenges Ahead. Robotics 2021, 10, 52.
02
Prototype Development of Small Mobile Robots for Mallard Navigation in Paddy Fields: Toward Realizing Remote Farming
水田野鸭导航小型移动机器人的原型开发:面向远程农业的实现
Hirokazu Madokoro et al.
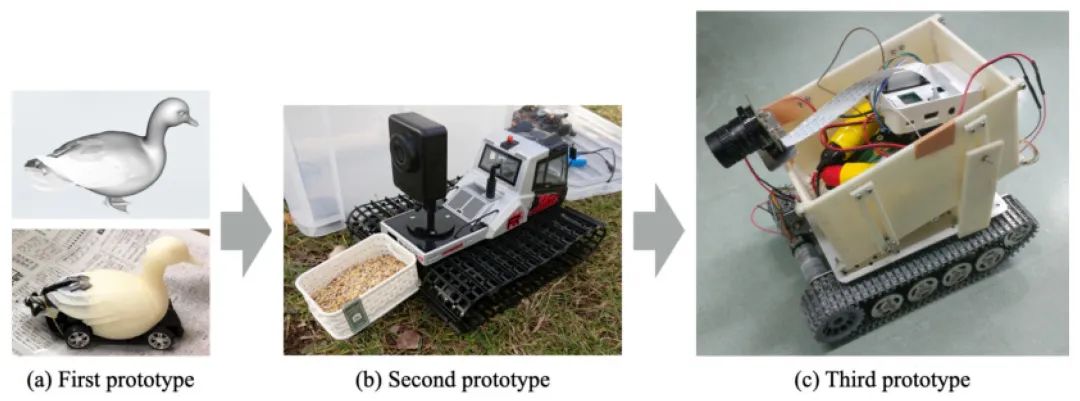
在水稻植物中移动的为野鸭导航的机器人原型。
文章亮点:
(1) 本文开发了三种模型的机器人原型,它们可以导航野鸭,以实现高效的稻鸭养殖。
(2) 研究了两种基于印迹和喂食的机器人导航方法。
(3) 进行了室外评估测试,以评估在实际水田上跑步的情况,并使用机载单目相机开发了室内和室外图像数据集。
原文出自 Robotics 期刊
Madokoro, H.; Yamamoto, S.; Nishimura, Y.; Nix, S.; Woo, H.; Sato, K. Prototype Development of Small Mobile Robots for Mallard Navigation in Paddy Fields: Toward Realizing Remote Farming. Robotics 2021, 10, 63.
03
A Study on the Feasibility of Robotic Harvesting for Chile Pepper
辣椒机器人采收可行性研究
Muhammad Umar Masood and Mahdi Haghshenas-Jaryani
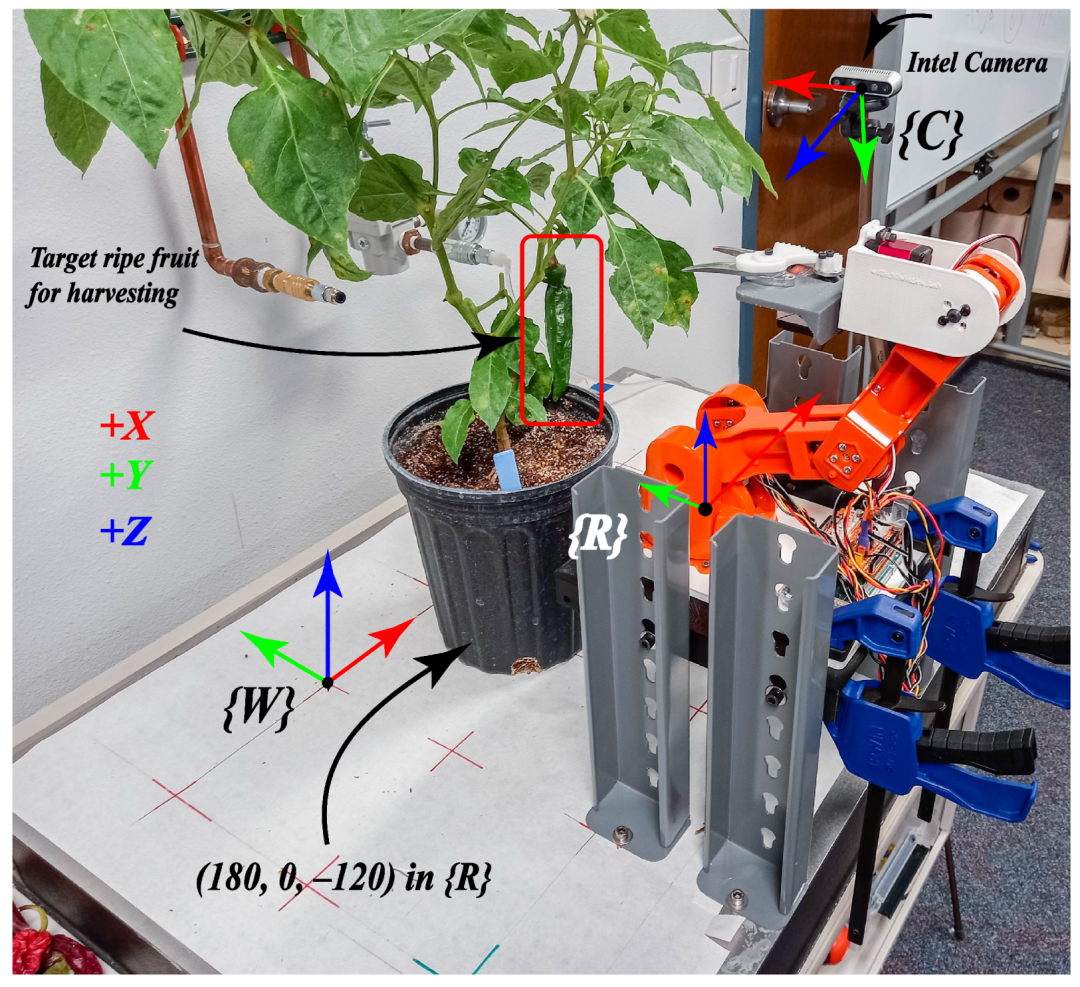
收割机器人测试。
文章亮点:
(1) 本研究使用五自由度串行机械手对辣椒进行机器人收割,机械手的末端执行器是一种剪刀式切割机构。
(2) 设计并在实验室装置中进行了实验测试,切割辣椒茎以分离果实。
(3) 机器人收获系统能够根据 MATLAB 程序估计的三维位置从植物中切割辣椒。
原文出自 Robotics 期刊
Masood, M.U.; Haghshenas-Jaryani, M. A Study on the Feasibility of Robotic Harvesting for Chile Pepper. Robotics 2021, 10, 94.
04
Monocular Visual Inertial Direct SLAM with Robust Scale Estimation for Ground Robots/Vehicles
地面机器人/车辆中基于鲁棒尺度估计的单目视觉惯性即时定位与地图构建
Bismaya Sahoo et al.
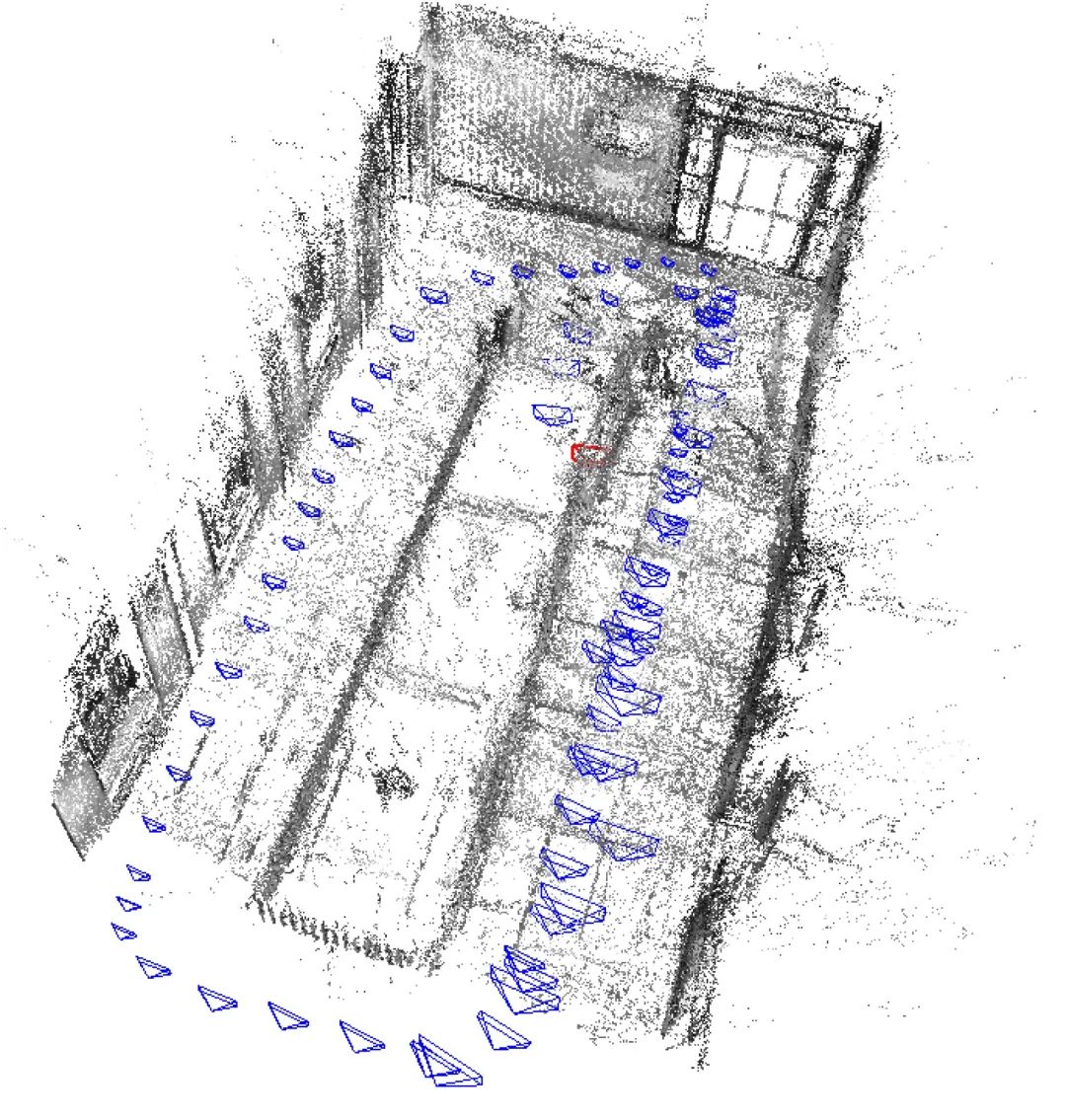
室内走廊的半密集地图。
文章亮点:
(1) 本文提出了一种新的地面车辆视觉惯性里程测量方法。
(2) 当越野车穿越坑洼、减速带或地形变化时,本研究的技术对于意外但不可避免的颠簸具有很强的鲁棒性。
(3) 本研究的主要贡献是使用从直接图像对齐计算的极坐标约束,以修正通过集成 IMU 测量获得的姿态预测,同时实时构建环境的半密集地图。
原文出自 Robotics 期刊
Sahoo, B.; Biglarbegian, M.; Melek, W. Monocular Visual Inertial Direct SLAM with Robust Scale Estimation for Ground Robots/Vehicles. Robotics 2021, 10, 23.
05
Robotic Complex for Harvesting Apple Crops
收割苹果作物的机器人综合体
Oleg Krakhmalev et al.
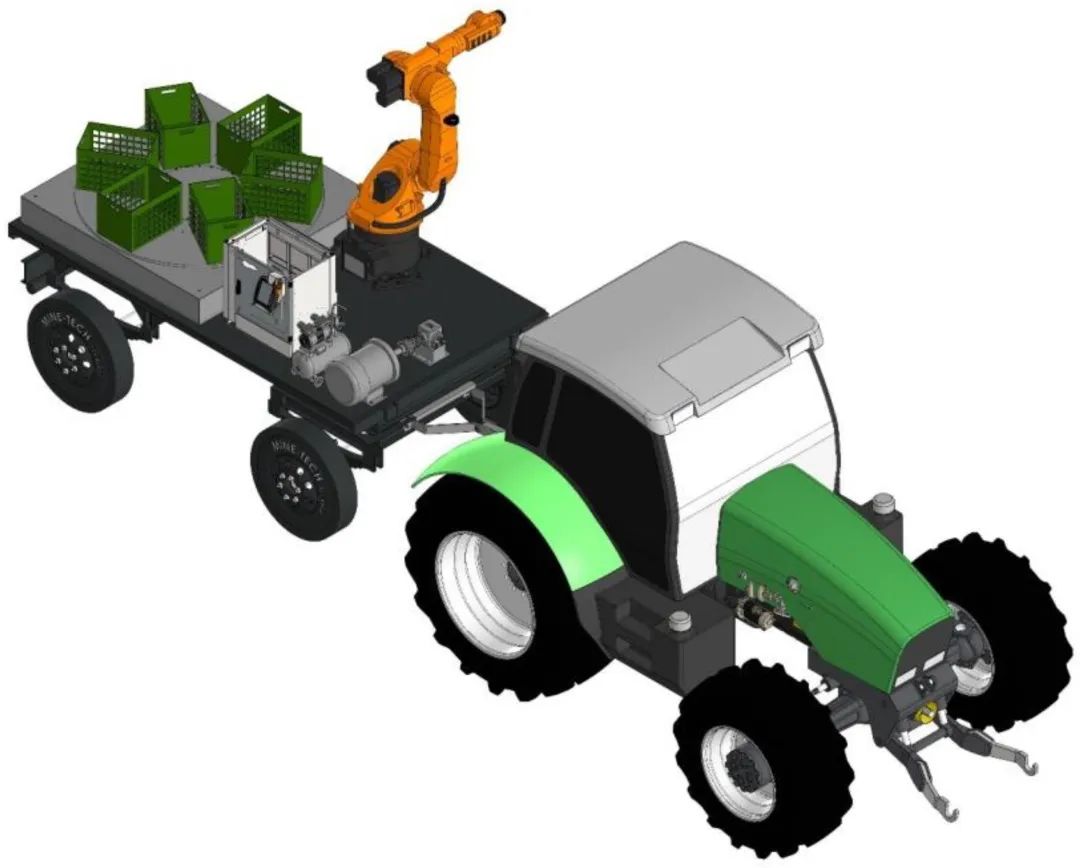
图形模型自动水果采集系统。
文章亮点:
(1) 本文讨论了为苹果作物的收割建立一个自动化系统的概念。
(2) 该系统是安装在拖拉机车上的机器人综合体,包括一个工业机器人和一个带水果收集容器的包装系统。
(3) 机器人配备了真空夹持器和视觉系统。
原文出自 Robotics 期刊
Krakhmalev, O.; Gataullin, S.; Boltachev, E.; Korchagin, S.; Blagoveshchensky, I.; Liang, K. Robotic Complex for Harvesting Apple Crops. Robotics 2022, 11, 77.
Robotics 期刊介绍
主编:Prof. Dr. Marco Ceccarelli, University of Rome Tor Vergata, Italy
旨在发表机器人及机器人系统在理论、设计和应用方面的最新发展相关文章,其中涉及到机器人智能、机电一体化、仿生机器人,特别关注机器人的自主行为、多传感器融合、学习算法、系统建模、控制软件、智能执行器、服务应用和人机交互等。
2021 CiteScore:4.9
Time to First Decision:18.9 Days
Time to Publication:48 Days


https://blog.sciencenet.cn/blog-3516770-1377125.html
上一篇:栏目编委“招募令”——MDPI Technologies 邀您共同促进期刊学术发展
下一篇:科研女性“力量接力” | MDPI 国际妇女节主题活动
