博文
ubuntu18.04安装ROS Melodic流程及出错解决 (搬砖)
||
整理自
https://zhuanlan.zhihu.com/p/105248080
https://zhidao.baidu.com/question/1667780197702832387.html
https://blog.csdn.net/weixin_40772628/article/details/103377637
教程:ubuntu18.04 安装Melodic
1. 安装说明
在国内,安装ROS任何一个版本,都不需要翻墙,如果安装过程中出现网络相关的问题,建议更换有线网络或者热点,然后重新执行出错指令。
2. 配置ROS软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
上述软件源,可能会导致下载速度过慢,需要几天时间完成下面的第5步,所以可以更换为中国科学技术大学的源:
sudo sh -c 'echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
![]()
3. 配置密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
![]()
第2步和第3步执行效果如图:

![]()
4. 更新系统软件源
sudo apt update
![]()
![]()
5. 安装Melodic
sudo apt install ros-melodic-desktop-full
![]()
提示安装包大小和所需安装空间,输入Y执行,执行效果如图
![]()
可以选择安装Melodic不同的版本,不同版本之间,包含的软件包不同,上述指令安装最全的软件包,也是官方推荐版本。
6. 初始化rosdep
sudo rosdep init rosdep update
![]()
此时可能会报错:rosdep 找不到命令,如图所示
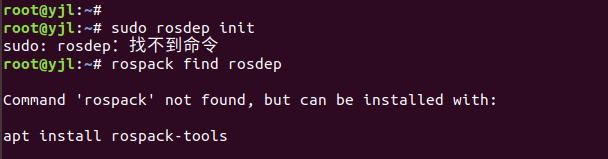
![]()
解决问题办法: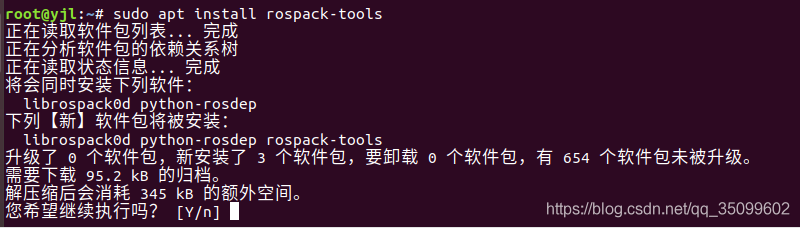
![]()
再报错ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
输入命令:sudo apt-get install python-rosdep python-wstool ros-melodic-ros 运行
![]()
7. 用户环境设置
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc source ~/.bashrc
![]()
设置环境变量path,即在终端可以自由使用ROS系统指令,这里强调是系统指令,而不是自己创建的包或者节点,后者是需要使能相应的工作空间。
具体可以参考:ROS工作空间。
8. 安装包编译依赖
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
![]()
执行效果如图
![]()
9. 验证安装
rosversion -d
![]()
执行效果如图
![]()
![]()
----------------------------------------------
10. 随便来一个 练练手
rosrun turtlesim turtle_teleop_key
![]()
https://blog.sciencenet.cn/blog-3425554-1266928.html
上一篇:各机构发布的精密星历 (包含卫星对比)